无人机飞行与拍摄稳定性影响因素的探究
2017-09-14 06:58魏秀卓马瑞张晋东北师范大学人文学院
科学中国人 2017年24期
魏秀卓,马瑞,张晋东北师范大学人文学院
无人机飞行与拍摄稳定性影响因素的探究
魏秀卓,马瑞,张晋东北师范大学人文学院
随着科学技术的发展,无人机产业也迅速发展。在航拍、地理勘测、通讯及其他领域中越来越多的出现无人机的身影。对于无人机,他并不需要有人驾驶,我们可以通过远程操控来实现某些特定的功能,无人机具有飞行高度高,可携带外接设备等一系列优点。无人机因其自身优点以及高性价比等优势吸引了人们的高度关注,并且在发展的过程中取得了巨大突破,但其也有一些局限性以及缺陷,本文针对飞行器无人机稳定性的因素进行了探讨。
无人机;飞行器;稳定性
一、飞行控制器中PID值的自动调整参数和人为调整参数对无人机稳定性的影响
在无人机飞行稳定性的影响因素中,飞行控制器是最为重要的因素之一,飞行控制器中主要的参数为PID值。而对PID值的调节可以分为自动调整和人为调整。人为校准PID值难度较大,需要丰富的经验与长时间的无人机飞行技巧,而自动调整参数虽然很便捷,但是准确性不高,容易造成偏差。PID的核心主要是为了计算输入和输出的信号误差,从而进行调整,在实际的飞行过程中,温度、气压等也会影响PID的自动调整。在这里我们提出利用计算机模拟飞行过程,将多组模拟飞行参数输入飞行控制器中,在实际飞行过程中,飞行控制器调用之前模拟飞行实验的PID值,直到找到最佳、偏差最小的PID值。这样的人为调整参数的方法,并不是最快捷的方法,因为控制器现有的硬件并不能计算出来自己飞行最稳定的值,那么我们利用IntelRealsense处理器,对处理器进行算法编写,让处理器能够监督飞行控制器进行监督学习,在每次飞行中,不断的纠正自己的PID值,直到计算出最佳的PID值。这样的纯人工智能的方法,更便捷、高效,并且大大的缩短了实验的周期。
二、无人机螺旋桨引起抖动造成的拍摄不稳定处理方法
无人机的抖动一般由飞机螺旋桨的转动引起,而这种抖动都是有规律的抖动,可由BER测试仪进行误码率测试,然后用抖动分析仪来隔离误差源。计算出抖动的频率后,利用示波器进行规律分析,判断出螺旋桨最高转速和最低转速时的最大抖动值和最小抖动值,利用CCD防抖技术,将CCD加装在可以移动的平台上,在平台有轻微颤抖时,CCD会根据输入的最大抖动值和最小抖动值计算出足以抵消抖动的移动量。接下来,在飞行控制器中加装CCD防抖组件,将CCD防抖组件和陀螺仪相连接,利用计算机计算出的抖动频率输入在CCD和陀螺仪组成的防抖装置上,在模拟飞行条件下进行模拟飞行,造成最大的抖动环境和最小的抖动环境,测试此时无人机的抖动是否有减少,在最后的计算机模拟实验中,利用CCD防抖技术之后,飞机的抖动频率发生在一个可控制范围内。
三、无人机在飞行过程中通过自我保护来确保拍摄的稳定
无人机在飞行过程中由于相机的视角并没有人眼的视角广,并且无人机无法感知周围的物体,在飞行过程中极易碰撞到物体,利用IntelRealsense处理器,在无人机的四周安装红外线测距传感器,传感器与IntelRealsense处理器连接,在处理器中利用计算机写出最小距离的躲避算法,连接传感器并模拟无人机飞行,进行试验,为防止数据丢失,最后把试验的数据保存在飞行控制器的存储芯片中,当无人机处理器中的存储芯片发故障时,传感器可以调用飞行控制器中的存储器来执行数据操作。
四、无人机拍摄云台在无人机倾斜与俯仰时的自动调平技术
无人机在转向时会发生倾斜和俯仰,这时会对相机的拍摄造成成像影响,而成像的准确性对于3D建模有着很高的要求。这时的倾斜和俯仰与飞机螺旋桨造成的抖动性质不一样,这种倾斜和俯仰角速很大,不是CCD防抖组件可以调节的,这时我们采用两轴的云台进行调节。
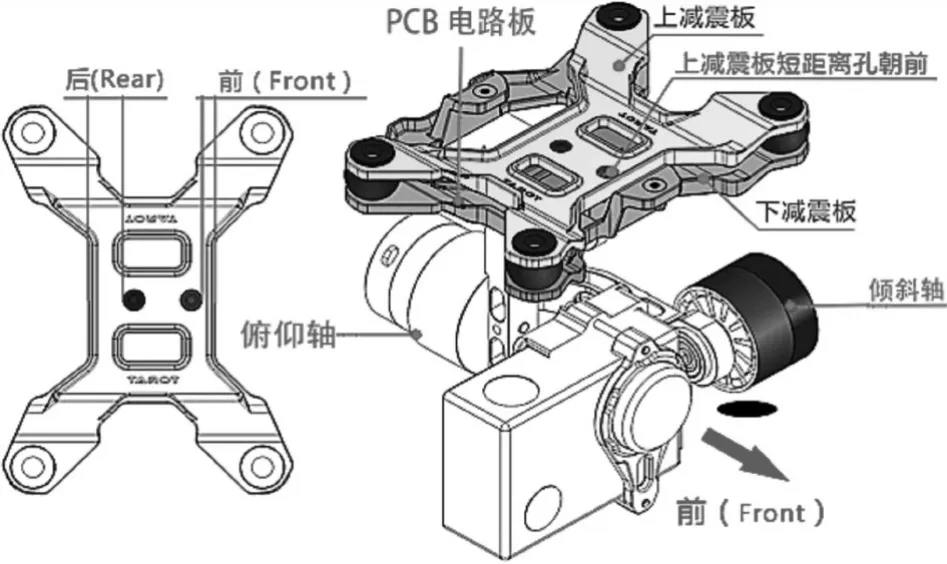
图1 两轴云台调节
这样的两轴无刷云台上部分采用PCB电路板,在PCB上装有陀螺仪和加速度计,有倾斜轴和俯仰轴,当飞机进行左右移动时,加速度计和陀螺仪会计算出倾斜值,并且传给倾斜轴,倾斜轴会朝反方向移动相同值,以保持无人机平衡,俯仰轴亦是如此。一般的陀螺仪和加速度计校准方法采用的是手动校准,手动校准的误差值较大,我们采用计算机算法进行校准,首先利用模拟实验进行模拟拍摄,对拍摄出来的图像进行水平分析,利用传感器输入图像,将图像转化为适合计算机的处理表达式,对现有的图像进行算法分解,计算出该区域拍摄时的水平误差值,并将此值输入云台的加速计和陀螺仪中进行校准,反复多次,直到拍摄的图像为最佳。这种水平校准的方式尚属首例,但是可以精确拍摄出地形地貌。
五、在抗风性中,无人机俯仰与倾斜最大角度时的自我调节
利用卡尔曼滤波器滤波器与陀螺仪值相结合的方式,对飞机的最大倾斜角度和最大俯仰角度进行优化,利用MATLAB的算法计算出无人机在最大抗风能力时PID的数值,再结合卡尔曼滤波器设计出带有卡尔曼滤波器和陀螺仪相结合ApmWB3.11飞行控制器,在模拟器实验数据表明,这种相结合方法设计出来的飞行控制器最为稳定,并且反应速度最快,在大风中的稳定时间较长,它可以随着风力的大小进行自我调节并且自我调节的数值最为优化。
结束语
无人机的快速发展会为当今社会带来极大的便利,随着科学技术的发展,无人机的应用、研究、发展都将会逐步加快。本文主要针对无人机在飞行和拍摄过程中造成其不稳定性的因素进行了探讨。在实际应用过程中可能还会存在其它一些造成不稳定性的因素,现提出的一些方法也存在一些不足,还希望在未来的工作中能逐步改进。
[1]谢榛.基于无人机航拍图像的室外场景三维重建技术研究,6-9页.
[2]李文慧,杨斌等.无人机遥感在三维地形建模中的应用初探, 3-5页.
[3]刘歌群.无人机飞行控制器设计及检测与控制技术研究,4-6页.
[4]郝恩敬,肖前贵,李志宇.无人机飞行控制器硬件设计,3-4页.
[5]冀晓萌,董朝轶,李健,闫放.基于H2最优控制的小型无人机飞行姿态控制器设计.
猜你喜欢
科技创新与品牌(2022年7期)2022-11-15
导航定位学报(2022年4期)2022-08-15
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
北京航空航天大学学报(2021年9期)2021-11-02
摄影之友(影像视觉)(2020年2期)2021-01-14
影像视觉(2020年2期)2020-03-19
网络空间安全(2019年8期)2019-03-18
通信产业报(2018年42期)2018-03-01
大众摄影(2014年11期)2014-12-02