
多功能情报雷达技术体制的形成
2017-09-08 06:54黄亮张进华
电子技术与软件工程 2017年14期
文/黄亮 张进华
多功能情报雷达技术体制的形成
文/黄亮 张进华
现代战场面临四代战机的隐身、高速、高机动等性能的威胁以及弹道导弹等高威胁目标的出现,分析常规地面防空情报雷达在新形式下探测能力的不足,提出低频段多功能情报雷达的设计思路。该雷达集低频段反隐身、大功率、两维相扫等技术为一体,充分挖掘综合技术手段的探测潜能,从而形成适应现代战场的多功能雷达技术体制。
四代战机 隐身 多功能
随着科学技术水平的发展以及作战任务需求的变化,雷达的研制水平已逐渐迈向第四代。新一代雷达面临更加恶劣的战场环境和更加复杂的目标特性,其作战对象包括气动目标、导弹目标等,涵盖了从地面几米到大气层外几百千米的广阔空间,被探测目标的散射截面积(RCS)、机动性能、气动性能均发生重大变化。为有效应对作战环境和被测目标的变化,满足丰富多样的作战任务需求,需要开展多功能雷达技术体制研究 。
1 雷达当前的挑战
为了替代服役多时的F-15飞机,美国空军早在20世纪80年代初期,就提出了研制先进技术战斗机(ATF)的计划,经过长期实践攻关,终于诞生了以F-22、F-35为代表的四代隐身战斗机。而俄罗斯则主导未来战术空军战斗符合体(PAK-FA)计划的发展,研制出以T-50为代表的新一代多用途战斗机。新一代的战斗机都具有以下特点:
1.1 隐身性能好
随着新材料、新技术在新一代战斗机广泛的应用,以及S形进气道、机身弹仓等隐身设计的气动布局,显著提高了F22、T50战斗机的隐身性能。
1.2 速度快
相较于上一代的战斗攻击机,F-22、T50均能够进行超声速巡航,可以高速突入敌方目标空域。
1.3 机动性强
与传统的F-117A隐身飞机,为了追求低探测特性而牺牲气动性能不同,F-22解决了隐身和气动性能的矛盾,可以实现9g加速度和高机动回转;同样,T-50也采用了与F-22一致的菱形翼,从而保证了其较强的机动性。
1.4 飞行高度高
F-22、T-50的最大升限接近20000米高度,具备高空突入敌方领空的能力,不仅可以躲避多种防空火力的打击,而且在空战和对地打击武器的投射上占据优势。
与此同时,现代战争的形态也发生着变化,纵观近些年全球范围内发生的局部战争,以美国为首的先进作战系统,在进行局部战争打击过程中,较多的使用巡航导弹、弹道导弹对重点区域进行空袭,以及使用隐身机、无人机对包括雷达在内的重点目标设施进行定点打击。因此,雷达自身的机动性以及对导弹目标的探测已成为雷达目前应该具备的能力。与此同时,导弹类目标具有高速、高加速、高威胁的特性,也对目前雷达的性能提出了更高的要求。
2 多功能雷达技术体制分析
与现有防空警戒雷达相比,目标RCS的下降造成雷达功率孔径积需增加约20 dB(隐身飞机的RCS 比常规飞机小约20 dB),由于机动性要求的限制,依靠提升雷达规模的途径已无法满足要求。从反隐身的角度分析,低频段具有对隐身目标潜在的探测能力优势。从应对高机动目标角度分析,相控阵体制的快速波束调度能力相对于机械扫描的方式具有明显优势。从应对远距离导弹类目标的观测,必须提高雷达的发射功率。因此,将过去防空网络中的中高频段两坐标雷达升级成具有较强机动能力的三坐标雷达,增加雷达发射功率,实现两维相扫功能,将有效提高对隐身战机目标的探测能力和防空网的生存能力。
2.1 概述
隐身战斗机、无人战斗机、导弹目标等高威胁目标的出现已成为现代战争中的新常态,如何从设计角度破解防空网络所面对的威胁非常急迫。针对雷达面临的探测目标多样、机动能力强、威力远等的要求,同时借鉴国内外雷达探测领域的先进经验,从雷达相关基本原理分析,给出典型的地面多功能的防空情报雷达的技术形态。
2.2 工作模式
针对不同场景和探测目标,多功能雷达工作模式有多种,其主要模式包括搜索工作模式和跟踪工作模式等。工作模式的设计是多功能雷达系统设计的关键环节和基础,优化工作模式设计是系统设计的核心。以下对影响搜索工作模式和跟踪工作模式设计的各种因素逐一进行分析,得出了设计方法和步骤。
2.2.1 搜索工作模式
2.2.1.1 确定搜索模式的考虑因素
对于多功能雷达,其作战环境复杂,探测目标多样,搜索模式应考虑以下因素:
(1)目标特性。目标特性可由目标类型和运动特性表征,所观察目标的类型有:飞机、导弹、舰船、外空飞行器等。目标运动特征包括进攻性目标的攻击方式和机动性能等。多功能雷达所观察的目标包括多种类型:飞机和空对地/地对空导弹等。
(2)监视空域。搜索屏立体角与监视空域的范围有关,搜索屏应能对所要求的监视空域内的目标进行屏状截获并对设定区域内的目标进行边搜索边跟踪。
(3)数据率。由于部分被测目标速度、加速度高,机动能力强等特点,搜素数据率应满足一定要求,否则易造成漏警、目标丢失等问题。
(4)其他因素。此外,雷达还面临着不同的自然环境的杂波影响,外界电磁环境的影响,以及主动式干扰等诸多因素的影响。此类因素较为复杂,已有广泛的文献进行了深入的讨论,本文不再赘述。
2.2.1.2 搜索工作模式设计
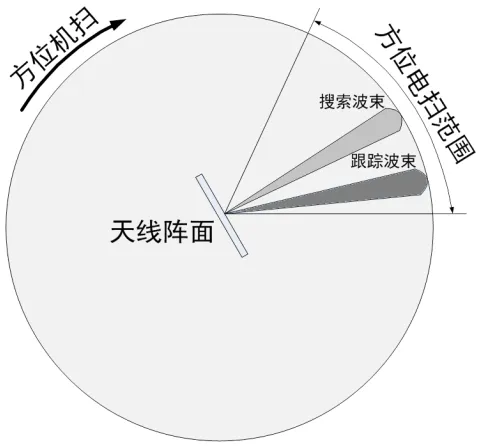
图 1:多功能雷达探测示意图
(1)隐身战机、无人机等气动目标。从此类目标飞行轨迹方面考虑,具有飞行航迹远、制空时间长、飞行方向无规律的特点。因此,搜索工作模式设计时,应考虑到空域上尽可能覆盖全方位。
(2)导弹类高速、高威胁目标。此类目标具有角速度变化快、威胁等级高等特点,因此,在搜索此类目标时,应考虑到雷达快速发现能力,并需充分保证搜索数据率。
2.2.2 跟踪工作模式
跟踪的方式一般可分为两类:一类为边搜索边跟踪方式(TWS);另一类为边跟踪边搜索方式(TAS)。由于TWS的数据率较低,因此一般用于对空探测。对导弹目标探测,则要求的数据率较高,因而常用TAS方式。
跟踪模式设计的基本原则就是达到所需求的跟踪测量精度,而雷达的跟踪测量精度与跟踪采样率密切相关,文献[3]依据典型目标探测跟踪精度的要求,将跟踪采样率分为三类。第一类为低采样率的目标跟踪,例如气动目标等,用于完成警戒和引导,其采样率依据目标特征一般在10~1秒之间。第二类为具有一定威胁度的目标,对其精度的要求较高,并可迅速转入更高精度的跟踪,其采样率一般在1~0.5秒间。第三类是为导弹目标提供早期预警和落点预报所需的精确跟踪数据,这类跟踪的采样率一般在0.5~0.05秒之间。
为了适应探测不同类型目标的需求,这就要求雷达的波束能在方位和俯仰二维方向上灵活地进行变化,指向预定的空域,而且要能自适应地控制雷达的能量、波形和脉冲数,以不同的信号处理方式匹配于战场环境[4][5]。因此多功能雷达采用一维机扫+两维相扫的相控阵体制是合理的选择。
2.3 频段选择
雷达波隐身是指在飞机某一特定方位角及俯仰角范围内降低其雷达散射截面(RCS)。其技术途径主要包括外形技术、雷达吸波材料技术、电子对抗和等离子体技术等,合理的外形设计可将RCS值减少75~90%,如果将外形技术、天线隐身技术与材料技术结合起来,RCS值可减少更多。
由文献[5]可知单基地搜索雷达方程:

根据天线增益的定义:

其中ωs为天线波束的立体角,Ω为要完成的搜索空域的立体角,ts为搜索时间(数据率),t0为驻留时间。
同时,接收天线增益为:

将(2)、(3)式代入(1)式,可得搜索雷达方程为:

由方程(4)可知,在目标RCS降低的情况下,要保障雷达的威力,应增加雷达系统的功率孔径积。
文献[10]给出了某型隐身巡航导弹鼻锥方向RCS数据,其研究结果表明,隐身目标在低频波段表现出较大的RCS,低频段的选择对于隐身目标的探测可贡献相对微波波段5dB~20dB以上的增益,而这么大的增益单纯从雷达系统的功率孔径积上获得是难以想象的,需要付出相当大的代价。
功率孔径积受到各种物理条件的限制,通常来说,频率越低,越容易获得较大的功率孔径积。因此,米波段相较于分米、厘米波段对探测隐身飞机更为有利,但米波段雷达具有测角精度低、阵面口径大、架设撤收时间长的缺点,而多功能雷达要完成多功能任务必然需要具备较高的探测精度和战场生存能力,同时考虑到战场对目标测角精度以及装备机动性的要求,米波段不适用于多功能雷达的应用。综合从反隐身、测量精度、机动性、制造成本等方面进行比较可知:多功能预警雷达比较适宜在半米波波段范围内选择适当频率,而远程警戒雷达可选在米波段工作。
2.4 数据率的要求
2.4.1 径向和切向目标
由于常规的预警雷达多采用方位上扫描方式,因此对于经向或者切向飞行的目标,探测数据率需满足预警反应时间内被测目标不产生显著威胁。由于需兼顾全方位固定翼目标的探测,仅依靠单部雷达的相扫功能无法满足此需求,需采用方位机械轴转动的扫描方式。因此,机械轴旋转速度决定了探测数据率,也就决定了探测径向和切向飞行目标两点之间的间距:

以具有高速巡航能力的F-22为例,按巡航速度为1.8马赫计算,同时按第一类低采样率目标跟踪数据率10秒计算,两点之间飞行距离约为6公里,这相对于预警雷达的探测威力来说,已能够预留足够的系统反应时间。
同时由(5)式可知,在目标飞行速度一定的情况下,要想使得探测到目标的两点之间间距较小,进一步提高探测精度,应提高机械轴旋转扫描的角速度。但是,由于对隐身目标探测的需求,雷达孔径尺寸往往较大,这就限制了机械轴的旋转速度。因此,在多功能雷达设计时,需要对两者进行折衷的考虑。
2.4.2 俯仰跃升目标
由于导弹类目标具有俯仰上变化率较快的特点,对于此类突然跃升目标的探测,设跃升速度为vE、搜索数据率为Δt,则在每个搜索帧周期内,上升高度为h=vEΔ t。设为达到所需的拦截概率所需的拦截次数为k,则低空搜索屏的高度为:

其中R为目标距离,θ0为波束俯仰宽度。由(6)式可以看出,当目标速度、距离确定时,对于同一部雷达来说,为达到相应的拦截概率,所需的拦截次数k增大时,需减小Δt的值,这对于机械转动的扫描方式来说,是无法实现的。因此,应利用相扫方式数据率高的特点,工作在停转相扫的情况下,减小相扫空域范围从而减小Δt的值。而对于不同雷达来说,拦截次数与θ0和Δt的比值有关,因此,探测同一目标时,增大波束俯仰宽度,可以提高拦截概率。因为波束宽度与等效孔径成反比,要增大波束宽度需减小雷达的等效孔径,而为了提高雷达的探测威力,却又需要提高雷达的等效孔径,因此两者之间同样需要进行折衷。
2.4.3 不等间隔数据率的探索
对于高速、高机动的四代战机的探测,还可以充分发挥新型雷达一维机扫+两维相扫体制的优势,对重点高威胁目标采用不等间隔跟踪模式,采样间隔在几百毫秒和几秒之间交替,俯视图如图 1所示。为了减少跟踪的动态滞后误差,提高跟踪全过程中的跟踪精度和速度精度,可以采用自适应滤波算法,减少动态滞后误差,抑制随机误差,确保滤波收敛,最终达到对高速运动目标不等采样的连续、精确跟踪。
2.5 机动性
现代战争中雷达是首先和重点被攻击的目标,通常雷达阵地目标特性明显,其伪装防护比较困难,加之其辐射输出功率源的特性,极易被侦查定位和遭到火力攻击。雷达具有较强机动性能,就可以在发现可能被攻击征候时,有计划地组织其快速转移到预备和隐蔽阵地展开,这对提高雷达的生存能力具有十分重要的作用。
在1982年的贝卡谷地之战和1986年的美利冲突中,以色列和美国凭借其侦察机和电子战飞机的有效支援,分别成功地压制和摧毁了叙利亚的苏制SA-2、SA-3、SA-6和利比亚的苏制SA-5及其雷达在内的地空导弹系统。这些导弹系统中除SA-6外,均为固定或半固定式,机动性极差。可见,机动性是决定防空武器系统生存能力的关键因素之一。
低频段的多功能情报雷达将是探测隐身目标和对空指挥、引导、目标指示的骨干装备,雷达天线口径必然会很大,如何提高其机动性也是雷达设计时所考虑的重点。
针对天线系统架设与拆收过程中使用的机构很多的特点,目前一般采用先进的机电液一体化技术。在保证各种机构操作的安全性和可靠性条件下,可在较短时间内完成架设或撤收,从而提高雷达的机动性。
2.6 小结
经过几十年的发展,雷达已根据使用要求的不同而进化成不同的形态,但是其基本原理并未发生重大变化。因此,设计不同需求下的雷达,是根据雷达的基本原理,从多个不同的方面进行折衷考虑的过程,进而形成最终的方案。
本文针对多动能雷达所面临的战场环境,以及作战对象的特点,综合威力、搜索能力、数据率和机动性等要求,给出了多功能情报雷达的设计思路。
3 结束语
本文针对现代战场上四代战斗机隐身、高速、高机动等特性,以及弹道导弹等高威胁目标的出现,提出了低频段多功能防空情报雷达的设计思路:集低频波段反隐身、大功率孔径积、两维相扫、机电一体化等技术为一体,从而形成适应现代战场的多功能情报雷达技术体制。
[1]赵培聪.2010年隐身与反隐身技术发展情况[J].现代雷达,2011,33(04):9-12. Zhao Peicong.Development of Stealth and Anti-stealth Technology of Foreign Country in 2010.Modem Radar, 2011,33(04):9-12.
[2]Kuschel H,Heckenbach J,Muller S.On the potentials of passive,multistatic,low frequency radars to counter stealth and detect low flying targets[C].2008 IEEE Radar Conference.[S]:IEEE Press,2008:1-6.
[3]张亚朋.多功能雷达工作模式研究[J].现代雷达 ,2003,25(08):1-4.Zhang Yapeng.A Study Operating Modes of Multi-function Radar[J].Modem Radar,2003,25(08):1-4.
[4]Skolnik M.Opportunities in Radar [J].Electronics and Communications Engineering Journal,2002,14(06):263-272.
[5]张光义.相控阵雷达原理[M].北京:国防工业出版社,2009.Zhang Guangyi. Principles of Phased Array Radar. Beijing:National Defense Industry Press,2009.
[6]周万幸.天波超视距雷达发展综述[J].电子学报,2011,39(06):1373-1378.Zhou Wanxing.An Overview on Development of Skywave Over-the-Horizon Radar[J].Acta Electronica Sinica, 2011,39(06):1373-1378.
[7]Skolnik M I.Radar Handbook(2nd Edition)[M].McGraw-HillBookCompany, 1990.
[8]陈振邦.防空情报雷达系统的反隐身优势[J].系统工程与电子技术 ,1992(01):63-69.Chen Zhenbang.The Anti-stealth Advantages of the Air Defence lnformation Radar System.Systems Engineering and Electronics. 1992(01):63-69.
[9]余宏明. 雷达/电子战中的现代隐身技术[J]. 现代雷达,2007,29(06):25-27.Yu Hongming.Modern Stealth Technique in Radar/EW.Modem Radar,2007,29(06):25-27.
[10]沙祥,万华,王宝.第四代低空监视雷达技术体制探讨[J].空军雷达学 院 学 报 ,2012,26(03):170-173.SHA Xiang, WAN Hua,WANG Bao.Discussion on Technology System of the Fourth Generation Low Altitude Surveillance Radar.Journal of Air Force Radar Academy,2012,26(03):170-173.
[11]郦能敬.对空情报雷达的频率优选[J].雷达科学与技术,2006,4(01):1-6. Li Nengjing.The Optimum Frequency Selection for Air Surveillance Radar[J].Radar Science and Technology,2006,4(01):1-6.
[12]朱新国.微波交会对接雷达目标跟踪的卡尔曼滤波器设计[J].兵工学报 ,2009,30(10):37-41.Zhu Xinguo. Kalman Filter Design for Target Tracking in Microwave Rendezvous a n d Docking Radar[J].Acta Armamentarii,2009,30(10):37-41.
作者单位 南京电子技术研究所 江苏省南京市 210039
黄亮(1987-),男,现为南京电子技术研究所工程师。
张进华(1979-),男,现为南京电子技术研究所工程师。
猜你喜欢
大自然探索(2023年7期)2023-08-15
小学生学习指导(低年级)(2018年12期)2018-12-29
摄影之友(影像视觉)(2017年11期)2017-11-27
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
现代电子技术(2014年23期)2014-12-13
新媒体研究(2014年13期)2014-07-31
学与玩(2009年5期)2009-07-14
中学英语之友·上(2008年2期)2008-04-01
中学英语之友·上(2008年2期)2008-04-01
