迟滞非线性系统的优化控制研究
2017-09-07 06:42:59陈圣涛董国贵
梧州学院学报 2017年3期
陈圣涛, 董国贵
(1.2.铜陵职业技术学院,安徽 铜陵 244000)
迟滞非线性系统的优化控制研究
陈圣涛1, 董国贵2
(1.2.铜陵职业技术学院,安徽 铜陵 244000)
为了提高控制系统的稳定性,该文研究了迟滞非线性系统的优化控制。首先对开环逆模型控制器进行优化设计,重点描述了控制原理和控制模型的建立。而后对前馈逆模型PID控制器进行了优化设计,并且对两种控制器进行了比较,最终得出优化结论。
迟滞非线性系统;PID控制器;优化控制
0引言
伴随科学发展的不断深入以及人类研究的持续更新,在智能材料领域压电陶瓷以及导电聚合物开始有了越来越广泛的应用,也随之有了越来越高的操作精度,对于系统也有了越来越高的动态性能要求[1]。但是值得注意的是,在智能材料中,导电聚合物因为迟滞等而存在非线性现象,对系统的动态性能存在一定的不利影响,给材料的应用带去了实际的困难。本文针对迟滞非线性现象进行了建模和补偿控制研究。
1开环逆模型控制器的优化设计
1.1 逆模控制原理
作为一种控制方法,开环控制并没有反馈控制结果至控制器,开环逆模控制就是为了前馈补偿而串联一个逆模型在被控对象之前[2]。依据逆系统的相关理论我们不难知道,总有一个系统在已有的线性或非线性系统中,达到使已有系统输入输出相同的效果,这个系统就是已有系统的逆系统。
y=H·[H-1[y](t)]·(t)
(1-1)
图1给出了开环逆模控制方法原理示意图,在图中,输入信号用ud(t)来表示,通过逆模型以及逆模型控制后的输出分别用v(t)和u(t)来表示,H(·)和H-1(·)分别为具体的被控系统和逆模型。

图1 开环逆模控制原理图
1.2 建立控制模型
逆模型的求取是逆模控制的关键所在,由迟滞逆模控制方法可知,如果没有达到逆模型的精度需求,会导致系统的精度不足,很难建立被控系统的逆模型,进而从一定程度上使逆模控制的运行受限[3];加入在构建逆模型的过程中,步骤过于复杂,那么很容易会因为某一步骤的误差而使控制效果大打折扣,因此本文在开环逆模控制的使用过程中,着重研究了被控系统逆模型的构建。
对于迟滞模型来说,辨识传递函数可以通过最小二乘法的算法进行,其目标是对拥有迟滞特性的系统进行更加有效的控制。本文用辨识传递函数来替代这种迟滞特性的系统,将其视为线性传递函数,更好地进行补偿控制,也即是说,可以把其转化为对线性传递函数基础上进行逆模型的构建。
再构建辨识传递函数的逆模型之前,必须要先对传递函数的稳定性进行判断,基于劳斯稳定性判据,对离散函数的稳定性进行辨识。如果稳定地通过劳斯判定,就可以对辨识传递直接进行倒数操作获取逆模型。式(1-2)给出了迟滞系统的逆模型:
(1-2)
加入通过劳斯判定可知辨识传递函数并不是稳定的,那么就不能直接采用辨识函数的倒数作为逆模型控制器,有必要按照式(1-3)构建出G-1(z)的逆模型,一般来说,与迟滞系统相比较,逆模型系统是滞后的,所以在逆模型的设计过程中,我们还要引入式(1-4)和式(1-5)所示的函数模型以及最优函数模型。
如图3所示,在平面构造等深图气水过渡带内有一口直井,同时钻遇了气层、气水同层和水层,井位处于图1中的③区(图3中阴影部分)。该井某一地层顶面海拔深度为 -5 100m,气层顶面为G点,气水同层顶面为F点,气水同层底面为B点,储层底面为H点。气水同层顶面与气层的底面交点D点在平面上的投影对应气水内边界线,该投影线与气层顶面交点为E点,投影线的反向延长线与气水同层底面交点为C点,气水同层底面与气层底面交点A点在平面上的投影对应气水外边界线。
G-1(z)=G1(z)*G2(z)
(1-3)
其中之前设计好的函数模型为式(1-4):
(1-4)
设计的最优函数模型为式(1-5):
(1-5)
在上式中,要满足Δ≥1。
在设计开环逆模控制器的过程中,我们不难得知,逆模型的设计是设计整个开环逆模型控制器的关键所在,而在设计逆模型的过程中,首先要从宏观上判断系统的可逆性,因为只有在可逆的情况下才能针对被控系统设计出逆模型。假如以线性传递函数作为给定的被控系统,还要判断传递函数的稳定性,当系统的稳定性有所不同时,要有针对性地设计出不同的逆模型。
2前馈逆模型PID控制器的优化设计
2.1PID控制原理
作为一种应用较为广泛的控制方法,PID控制法具有较为简单的算法,被控模型的建立也比较容易,鲁棒性很强[4],能有效地抵御来自系统外部及内部参数不确定的各种干扰,同时良好的可靠性和稳定性也是PID控制器的优点。
图2给出了PID控制的原理示意图。
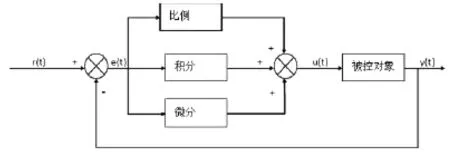
图2 PID控制系统原理图
由上图可知,被控对象以及控制器共同组成了整个控制系统,u(t)、r(t)和y(t)分别用来表示通过控制器的信号、输入数据以及输出数据,输入和输出数据之间的控制偏差用e(t)来表示,具体表达式见式(1-6)。
e(t)=y(t)-u(t)
(1-6)
从本质上来说,PID控制器就是线性调节器的一种,是通过输入输出数据的控制偏差进行微分、积分以及比例的叠加达到调节控制被控系统的效果。式(1-7)给出了控制器的微分方程表达式:
(1-7)
2.2 逆模
PID控制器建模
针对前馈逆模型,本文用图3展示了具体的PID控制器的结构示意图。在图3中,迟滞系统为P,P的逆模型用G-1(z)来表示,PID就是PID控制器的简称,迟滞系统非输入信号和输出信号分别用Yd(k)和Y(k)来表示。

图3 前馈逆模型PID控制器结构框架图
模型建立完成后,则展开对PID模型的调整工作,借助调整可促使控制器处于最优状态,进而达到优化控制效果的方式,具体调整方式,借助临界比例法。具体的临界比例法公式如表1所示。
表1 临界比例法公式

控制器类型比例系数Kp积分参数KI微分参数KDP2Kp∞0PI2.2Kp0.833Kp0PID1.7Kp0.5Tk0.125Tk
为了对构建控制器的控制能力进行检验,本文在迟滞特性的系统中,通过输入不同频率的信号进行PID控制实验,输入信号选用变频的u(t)=2sin(2πt)+10sin(0.5πt),能把实际工程中的输入信号特征更好地反映出来,如果设计的PID控制器能达到良好的补偿控制效果,那么也就表明在变频信号下,设计的前馈逆模型控制器能对具有不同输入信号的迟滞系统进行控制。
2.3 两种控制方法误差比较
为了对不同控制方法的效果进行更加直观的比较,完美还引入了均方根误差方法[5],现可以两种控制方法的输入信号进行比较,并分析具体输入信号均方根误差,且得到如下表2。
表2 输入信号的均方根误差

输入信号均方根误差u(t)=sin(πt)0.0208u(t)=2sin(2πt)+10sin(0.5πt)0.0312
借助表2可以得到PID控制器可以实现跟踪动态输入信号,并能够完成对复杂输入信号的迟滞特性的系统进行补偿控制。且根据输入信号的基本情况,能够得到逆模型控制和前馈逆模型PID控制的补偿结果,详见图4、图5。

图4 输入为u(t)=sin(πt)的补偿结果
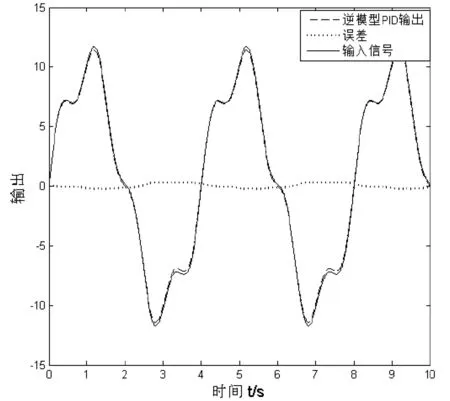
图5 输入为u(t)=2sin(2πt)+10sin(0.5πt)的补偿结果
在得到具体控制方法的控制效果,运用均方根误差的方式,对两种控制方法进行比较,从而得到如表3所示的比较表。
表3 逆模型控制和前馈逆模型PID控制均方根误差比较

控制方法均方根误差逆模型控制0.0633前馈逆模型PID控制0.0208
表3给出了具体的比较结果。由表可知,设计的前馈逆模型控制方法能得到更小的迟滞补偿控制误差,但是从结构上来说,逆模型控制属于开环控制的一种,具有更简单的结构和控制过程。
3结论
本文首先针对迟滞特性系统,详细地分析了系统的可逆性,然后通过传递函数稳定性的辨识建立逆模型控制器,最后与PID方法以及传递函数相结合构建了PID逆模控制器,并通过具体的参数调试达到了最佳的控制效果。本文对两种控制方法的控制误差进行了比较,把控制效果更直观地展现在读者面前。
[1]陈远晟,裘进浩,季宏丽.基于双曲函数的Preisach类迟滞非线性建模与逆控制[J].光学精密工程,2013, 21(5):1205-1212..
[2]赵新龙,谭永红.对Preisach类的迟滞非线性神经网络建模[[J].控制理论与应用,2006,23(4):581-583.
[3]Semenov M E, Abapolova E A, Boeva A V, et al. Synthesis of the optimal control for a class of systems with the hysteresis nonlinearities[J]. International Journal of Applied Engineering Research, 2014, 9(22):16991-16997.
[4]Liu Y J, Wang D Q, Ding F. Least-squares based iterative algorithms for identifying Box-Jenkins models with finite measurement data[J].Digital Signal Processing,2010,20(5):1458-1467.
[5]Baradaran-Nia M, Alizadeh G, Khanmohammadi S, et al. Optimal sliding mode control of single degree-of-freedom hysteretic structural system[J]. Communications in Nonlinear Science & Numerical Simulation, 2012, 17(11):4455-4466.
(责任编辑:高 坚)
Study on Optimal Control of Hysteretic Nonlinear System
Chen Shangtao1, Dong Guogui2
(1.2.Tongling Polytechnic, Tongling 244000, China)
In order to improve the stability of the control system, the optimal control of hysteretic nonlinear system is studied in this paper. Firstly, the optimal design of the open-loop inverse model controller is presented and the control principle and control model are described. Secondly, the optimal design of feed forward inverse model PID controller is carried out and the two controllers are compared. Finally, an optimized conclusion is put forward.
Hysteretic nonlinear system; PID controller; optimized control
2017-03-20
安徽省教育厅高校自然科学研究重点项目(KJ2017A632)
O231
A
1673-8535(2017)03-0025-05
陈圣涛(1970-),男 ,安微无为县人,铜陵职业技术学院讲师,研究方向:电气自动化控制。
董国贵(1969-),男,安徽铜陵人,铜陵职业技术学院讲师,硕士,主要研究方向:电气教学、供配电、电气控制、汽车电路。
猜你喜欢
供水技术(2021年2期)2021-07-16 07:30:14
机电工程技术(2018年10期)2018-12-06 02:26:38
电子测试(2018年1期)2018-04-18 11:52:24
合成化学(2015年4期)2016-01-17 09:01:04
海军航空大学学报(2015年1期)2015-11-11 17:22:41
天然气与石油(2015年2期)2015-02-28 17:01:12
天然气勘探与开发(2014年4期)2014-02-28 17:00:19
化学工业与工程(2012年6期)2012-02-10 03:21:05
小猕猴学习画刊(2006年8期)2006-07-12 05:36:58