船舶操纵性能试验在自卸砂船中的应用
2017-09-06 02:08潘海优
珠江水运 2017年13期
潘海优
摘 要:珠江水系河道复杂,自卸砂船数量众多,操纵性测试仪器利用DGPS数据,通过软件实现中国海事局《内河船舶法定检验技术规则2011》规定的动态测试项目。通过实船测试验证该类船舶的操纵性能,其测试数据对船舶操纵人员在营运过程中具有一定的参考价值。
关键词:船舶操纵性 DGPS 船舶性能测试 自卸砂船
1.引言
珠江水系自卸砂船主要航行于珠江干线、珠江三角洲地区及港澳航线,该类船舶近年来载货量逐渐发展到5000吨级,船长普遍超80m;同时珠江水系河道复杂,船舶数量众多,自卸砂船其特殊性对船舶操纵人员营运过程中要求更高。中国海事局《内河船舶法定检验技术规则2011》对80m以上货船提出通过实船操纵性能试验测试和评价其操纵性。利用导航定位系统(DGPS)对80m以上自卸砂船進行操纵性能测试。
2.测试系统组成及实船试验条件2.1测试系统组成
本测试系统的组成包括:DGPS信号接收仪、DGPS信号数据采集盒、便携式计算机及测试软件等,如图1所示。
2.2实船试验条件
(1)被检实船应具备的条件:①被检船舶各项工程应全部竣工,系泊试验合格、倾斜试验完成、稳性计算合格。②船舶纵倾应与设计要求一致,无横倾。③被检船舶若为双桨船,其左右主机转速应能调整一致,船舶驾驶室的舵角指示器应进行校对,使实际操舵角与指示舵角相符。
(2)实船操纵性能试验水域的条件应具备:①风力不超过蒲氏3级风、水域宽阔、平静、浪高不超过0.2m。②水域水深不小于3倍船舶吃水、水域宽度应满足船舶满车满舵工况下,回转540°~720°的要求。
3.实船试验内容及方法
根据《法规》有关要求,实船试验内容包括船舶航速试验、回转试验、Z形操纵试验、紧急停船和惯性停船试验。
3.1船舶航速试验
按照船舶设计的正车工况,测定主机输出功率为50%、75%、90%、100%时的静水航速。使船舶保持直线航行,操舵角应不大于5°,待航速稳定后,开始测速。用DGPS接收机记录船舶运动轨迹及速度,通过接收机输出接口将数据传输到计算机。在同一测速线上往返测量两次,取平均值作为对应主机工况下的航速,平均航速按公式Vmean=(V1+V2)/2计算。
3.2回转试验
回转试验系测定船舶回转性能的试验。船舶在预定航向上稳速直航2min~3min,操舵至35°或允许最大舵角,待船艏向角变化达540°时,试验结束。左、右舵各操一次。用DGPS接收机记录船舶运动轨迹及速度。记录艏向角、横倾角及其他有关数据,计算出船舶的纵距、横距、战术直径和回转直径。
3.3Z形操纵试验
Z形操纵试验系判定船舶航向改变性能的试验,通常以左右10°舵角作为试验标准。船舶在预定航向上稳速直航2min~3min,快速操舵至右(左)10°,稳住舵角。当艏向角偏离初始艏向角达右(左) 10°时,快速反向操舵至左(右)10°,稳住舵角。当艏向角偏离初始艏向角达左(右) 10°时,快速操舵至右(左) 10°,稳住舵角。当艏向角再次偏离初始艏向角达右(左) 10°,快速操舵至左(右) 10°,稳住舵角。当艏向角向左(右)达初始艏向角时,快速操舵回中,至此一次试验结束。用DGPS接收机记录船舶运动轨迹及速度。记录艏向角及其他有关数据,计算第一超越角,第二超越角,绘出Z形操纵试验记录曲线。
3.4紧急停船和惯性停船试验
停船试验系籍助倒车停船或惯性停船以判定船舶停船性能的试验。船舶在航向上稳速直航,下达倒车(停车)令,船由减速前进至船接近对水移动停止,试验结束。用DGPS接收机记录船舶运动轨迹及速度。记录艏向角及其他有关数据,计算停船迹程、停船纵距、停船横距及停船时间。
4.实船试验结果
本测试系统在近年已对珠江水系流域多艘自卸砂船进行测试,本文列举一艘“89.8m自卸砂船”在相同水域和工况下的船舶操纵性和快速性测量结果,其船舶测试航行结果及轨迹如表1~表4和图2~图5所示。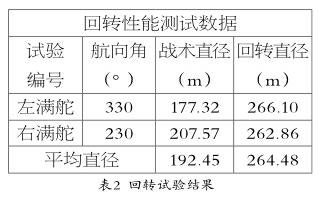
4.1航速试验结果
航速试验在主机50%、75%、90%、100%负荷的条件下进行,分别进行了往返的航速试验。
4.2回转试验结果
回转试验在主机100%负荷的条件下进行,分别进行了左满舵和右满舵的回转试验。
4.3Z形操舵纵试验结果
Z形操舵试验在主机100%负荷的条件下进行,测试的操舵角度为左10°和右10°。
4.4惯性试验及急停试验结果
惯性及急停试验在主机100%负荷的条件下进行,测试分别进行了顺流和逆流的惯性及急停试验。
图2~图5中船形图标方位代表实船在测试过程中的起点和终点的航向角,曲线代表实船在测试过程中的航行轨迹。
5.结语
近年来通过导航定位系统(DGPS)对多艘80m以上自卸砂船进行操纵性能测试,其测试数据及结果能满足相关法规要求。航行于珠江水系的自卸砂船的各项操纵性能是令人满意的,同时测试数据对自卸砂船操纵人员在复杂河道行驶船舶有重要参考价值,增加自卸砂船营运安全性。
参考文献:
[1]内河船舶法定检验技术规则(2011)及修改通报(2015)[S].
[2]船舶航速和操纵性的DGPS测试方法[S].
[3]袁强,徐宏勋,韩开封,等.船舶操纵性能测试系统研究与开发[J].造船技术,2014(5):14-17.
[4]胡卓,浅谈船舶操纵性试验内容和方法[J].广东造船,2003(3):13-16.