
基于网络机器人的远程室内安防新方法*
2017-09-06 10:55:31王骥谢仕义钱建东汪良红
电子器件 2017年1期
王骥,谢仕义,钱建东,汪良红
(广东海洋大学信息学院,广东湛江524088)
基于网络机器人的远程室内安防新方法*
王骥,谢仕义*,钱建东,汪良红
(广东海洋大学信息学院,广东湛江524088)
针对智慧家庭工程安防需求,研究了无线网络与云计算环境下远程安防机器人系统设计的关键技术。项目首先将WIFI短距离无线通信技术与远程网络技术(GPRS、TCP/IP)一体化集成用于机器人系统通信,系统功能强;利用QT技术设计显示界面,使操作、显示更加合理化、人性化;机器臂设计理念采用柔性设计技术,便于拾取危险物体或探测险情;项目融入了云计算技术,利用“腾讯云”存贮有价值信息,系统可扩展性更好。系统测试表明,当家里处于无人状态,系统主动开启安防监控模式。意外情况发生时,传感器将报警数据发送到主控板进行处理后通过GPRS模块打电话给用户,并同时发短信;用户接到报警可以打开客户端并通过远程视频监控室内情况,控制机器人及时进行处理险情。项目优点在于将机器人、无线网络、云计算等新兴战略技术融入智慧家庭工程,系统实现了网络化、智能化、人性化工作模式。
WIFI;TCP/IP;3G通信技术;云计算;安防机器人
随着信息时代的高速发展,基于网络安防机器人的智慧家庭工程已经是当今信息产业界热点研究领域。其涉及热点技术主要有:导航定位、计算机视觉、目标跟踪、移动与运动控制、检查与巡检、目标检测与识别、传感器网络,人机交互[1-2]。在这些方面,近几年国内外学者做了大量工作,最新典型的研究成果有:陈国良[3]、赵杰[4]、李岩[5]等研究了网络机器人体系结构与管理控制系统,但通信方式限于Internet的TCP/IP协议,虽实现了双工,但缺乏无线通信技术植入而控制方式欠缺灵活;Han-Saem Park[6]设计了基于贝叶斯理论的上下文感知专家系统应用于家庭服务机器人,但没能解决机器人准确移动定位的问题,使其处理危险情况反应能力有限;赵新[7]、武二勇[8]、田孝军[9]研究了机器人路径规划中的信息提取、处理以及驱动定位问题,但信息提取方式限于视频,方式单一,工程实用性弱;Sidney R D[10]、Andrey[11]V S、Cinara[12]G研究了轮式多移动协作机器人网络的拓扑控制与维护问题,控制方法具有鲁棒性,准确性,但实现系统复杂,制作、维护成本高而不适用于家庭安防应用;Yesim O[13]、Wang Yaonan[14]、Michael B[15]为解决机器人移动路径规划定位问题而建立了模糊神经网络模型解决机器人计算、精确控制、导航等难点问题,但复杂的计算过程同样不适合危险环境下需要快速反应的安防场合应用,而且内存空间需要大制约其稳定性;Guo Peng[16]、Philipp M[17]、Rodrígueza A C[18]引入多种无线通信方式拓展了网络机器人管理模式,但多任务复杂性消耗资源太大制约了其面向具体工程实现的能力。
总之,目前网络安防机器人领域研究聚焦在实时性低,操作对象多是静态或具有明显的运动规律的情况,缺乏面向突发性任务而需要反应能力迅速的工程化研究。而且目前机器人热点技术研究偏理论化,缺乏从工程易实现角度与人性化方面的研究。基于此,本文研究既能进行远程网络化视频监控,又能通过网络进行现场险情快速处理的实用机器人安防系统。
1 系统硬件设计
系统开发平台使用实时性好的操作系统μCOSⅡ,以32 bit ARM处理器作为核心处理器。系统主要分为4部分:(1)主控板——核心部分,负责和远程服务器通信,同时管理安防机器人和各个节点的数据通信;(2)安防机器人系统——具有机械臂、温湿度传感器、超声波实时监控等组成部分;(3)安防监控节点——安装有人体红外热释电传感器、可燃气体传感器、温湿度传感器与视频监控器等感测器,用于安装在室内的任何可能被入侵的地方;(4)PC终端上位机——用于远程监控家里的情况,并且操作安防车机械臂进行安全事故处理。系统架构如图1所示。

图1 系统总体结构图
如果安防节点一旦监测到异常情况,就会通过主动WIFI上传信息给主控板,系统远程控制利用SIM900拨打用户电话,同时发送报警信息短信;用户还可以通过打开PC远程客户端实时主动进行险情监控,以及操作安防机器人做应急处理。
1.1 主控板电路设计
主控板系统包含以下部分:(1)系统主控CPU——基于32 bit ARM cortex-M3作为主控芯片,并成功的移植了μcos-Ⅱ操作系统,系统实现了实时性多任务处理能力与稳定的远程通信。(2)主控板由STM32f103ZET6、无线串口、WIFI模块RM-04与SIM900模块组成。如图2所示。

图2 主控模块结构图
1.1.1 WIFI模块RM-04的使用
系统WIFI模块选用RM-04,其接线原理见图3。RM-04工作模式设置为串口转WIFI的AP模式。WIFI模块通过路由器接入主控系统,实现与服务器通信。
1.1.2 SIM900A模块的使用
项目使用SIM900A模块实现打电话、发短信功能,其接线如图4所示。
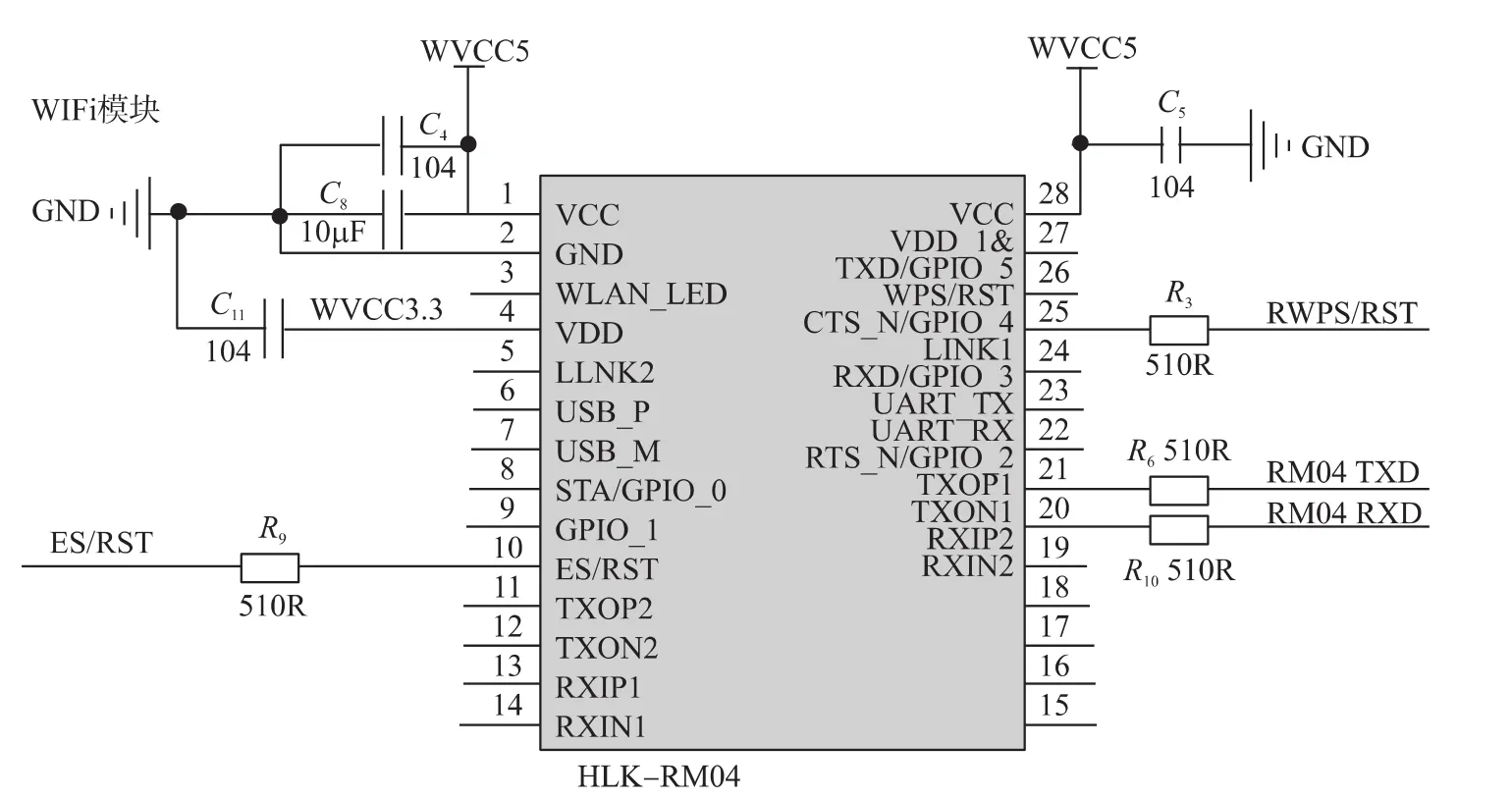
图3 W IFI模块原理图
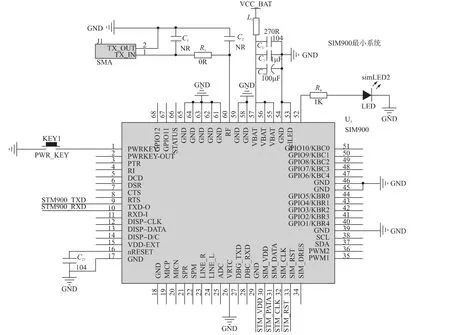
图4 SIM 900A模块电路图
1.2 安防机器人电路设计
1.2.1 安防机器人管理系统
安防机器人主控板STM32是一个32 bit的MCU,资源足够控制机械臂和安防车的4个电机,主控MCU还有3个串口,供无线数据传输使用,是系统主控板与安防机器人数据双向通信的通道。整体控制框架如图5所示。

图5 机器人控制系统图
1.2.2 电机驱动系统
安防机器人的电机驱动电路如图6所示,一个驱动电机需要两片BST7971作为电机的驱动芯片。安防机器人MCU内部的定时器输出PWM通过三态缓冲器74HC244D提升驱动能力后,输入到两个BST7971的 PWM输入引脚,进而控制电机的正旋,逆旋,停止,加速,减速等,如图6所示;三态缓冲器74HC244D的接口电路如图6所示,三态缓冲器的作用是其一是为了提高PWM的驱动能力,其二是为了隔离主控芯片与驱动芯片,防止驱动芯片对主控芯片干扰。

图6 电机驱动/控制电路
1.2.3 机械臂的控制
机械臂的组成结构是由5个型号为MG996R的舵机和支架组成,如图7所示。舵机控制端输入是一个宽度可调的周期性脉冲信号,脉冲信号的周期为20 ms。其角度变化与脉冲宽度的变化成正比,脉冲宽度改变时,转轴的角度发生改变。舵机的输出轴转角与输入信号的脉冲宽度之间的关系如图7所示。
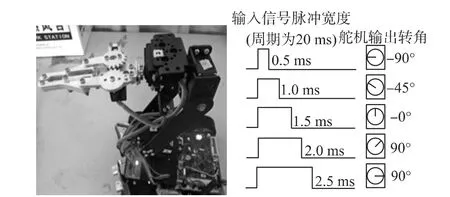
图7 机械臂与舵机的控制脉冲波形图
图7中,机械臂5个舵机是通过主控芯片控制定时器复用5个周期20ms,宽度为0.5ms到2.5ms的PWM波形来调整舵机的转动角度。
1.2.4 超声波测距系统
超声波模块HC-SR04安装于安防机器人的前部用于避障。在整个安防车运行的过程,始终处于工作态。有障碍物时,主控芯片利用两组超声波测距数据进行对比定位后判断行走路线。测距系统与超声波的控制时序如图8所示。
1.2.5 无线通信模块使用
在安防机器人上用到了无线串口通信模块E14 -TTL100,其理论传输距离是2 000 m,足够覆盖智能家居工程的应用场所。而且该无线串口模块稳定性较高,因此利用其链接局域网;另外机器人系统使用NRF24L01无线模块用来与监测节点进行通信,不占用串口资源,克服了串口数量对外界进行通信的限制。
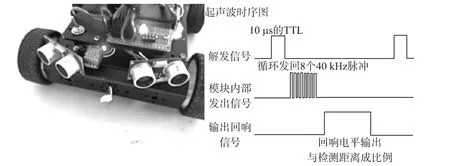
图8 测距仪安装位置与测距时序图
1.3 安防监控节点
节点总体框架图与实物图如图9所示。节点中的主控芯片是STM32f10xRB,控制所有节点定时通过模块NRF24l01向外发射所采集到的信息;在节点板上有温湿度模块DHT111、烟雾传感器MQ-02以及人体红外传感器组成。每个节点都有自己的ID地址,在发送采集的数据之前,先发送一段ID供主控那边接收后进行识别,再将采集到的数据编码发送。
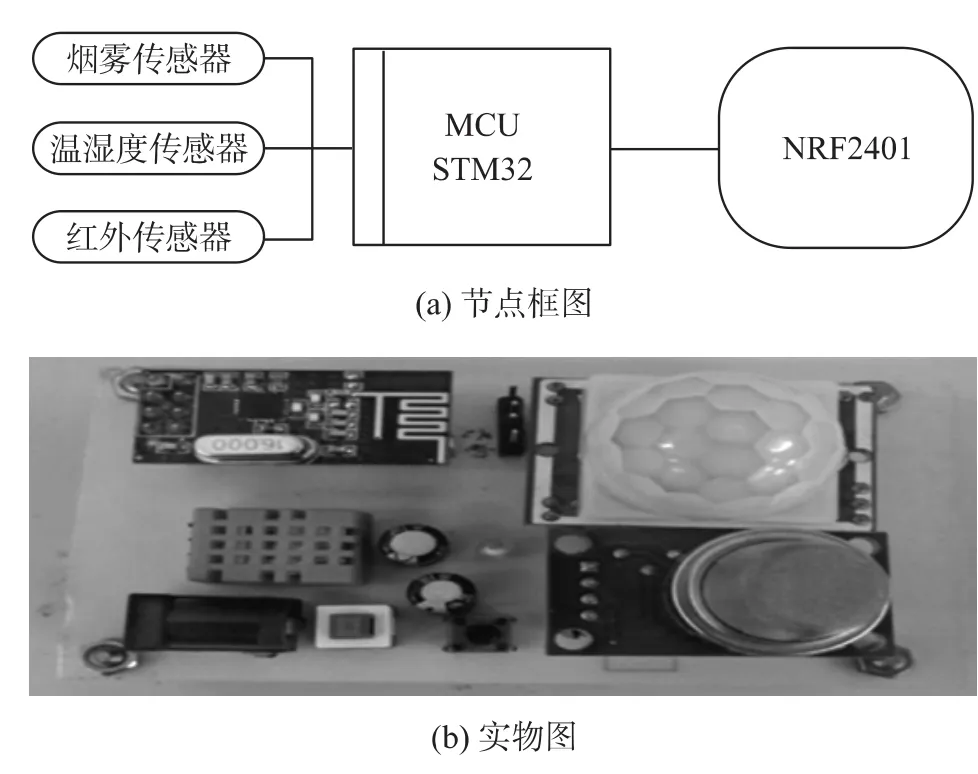
图9 节点框图与实物图
节点人体红外传感器选用超低电压工作模式的高灵敏度传感器HC-SR501。在本设计当中,将节点安装在门窗上等关键用于防人与大型动物入侵;烟雾探测选用型号是MQ-02的传感器。它可以用于检测可燃气体,有两个数据输出引脚,一个是数字信号引脚DO,通过调节烟雾的浓度来指定报警的浓度,另一个引脚是模拟信号引脚AO,其输出的电压信号0~4 V之间的变化,0.2 V~0.3 V时是正常的烟雾浓度,超过0.3 V是就表示浓度超标;节点上同样装有温湿度模块,采集节点上与所处环境的温湿度。节点对采集的数据进行分析处理好打包通过NRF24l01定时发出去。

图10 网络摄像头与工作流程
另外,便于了解室内情况,部分监控节点还安装了网络摄像头。如图10所示,网络摄像头可以通过无线或者有线的方式跟路由器进行连接,将摄像头流媒体信息送到服务器,再转回给PC端。网络摄像头采用的是5 V的供电,有360°旋转功能。用户通过该节点进行实时的视频监控。
2 系统的软件设计
2.1 避障系统原理
本研究采用超声波测距方法为安防机器人提供准确定位、识别的运动距离信息。测距仪分2组安装在机器人的前部左右两侧。避障系统如图11所示。本移动机器人采用前、左、右3方向超声波测距系统。
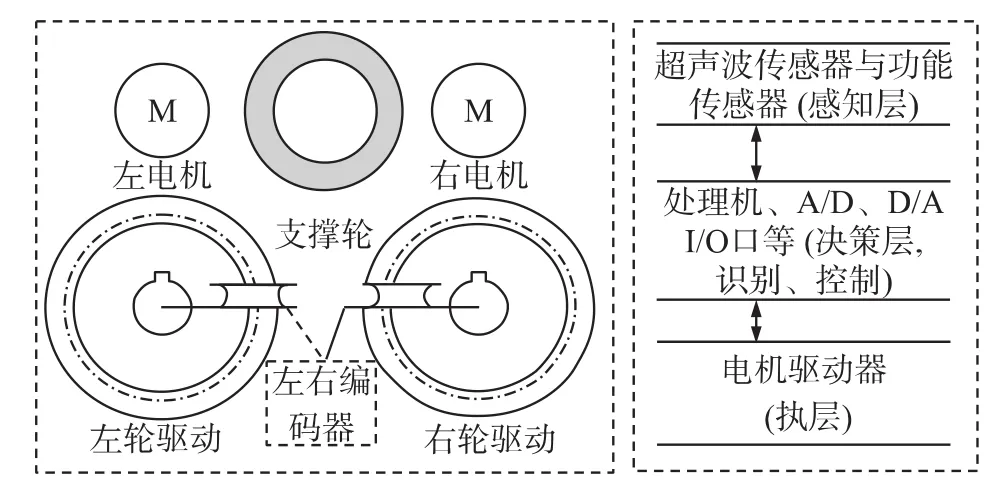
图11 避障系统底盘与功能
2.1.1 超声波测距原理
超声波发射器向某一方向发射超声波(开始计时),超声波在空气中传播,碰到障碍物就立即折返,超声波接收器收到反射波就立即停止计时,根据超声波在空气中的传播速度和计时器记录的时间,就可以计算出发射点距障碍物的距离。为了使移动机器人能自动避障行走,测距系统要获取实时的障碍物距离信息(距离和方向)。在行走过程中,机器人根据超声波数据和自身的运动状态来修正运动位姿,并进行运动参数设置或状态变换,且避开障碍物后,能返回设定运动路线上继续移动。
2.1.2 机器人目标移动定位原理
机器人的相对于目标定位是基于超声波编码器的“车轮脉冲定位”方式。根据机器人的室内工作环境,建立一个以地面为XY平面,以一个运动周期开始时机器人的中心为原点的直角坐标系,在此运动周期结束时进行一次计算,用来描述机器人在一个运动周期后相对于此运动周期前位姿的变化情况。机器人只在XY平面内做二维平面运动,几何关系如图12所示。
根据图12所示几何关系,得到:
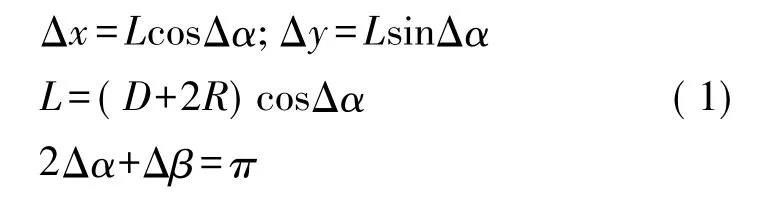
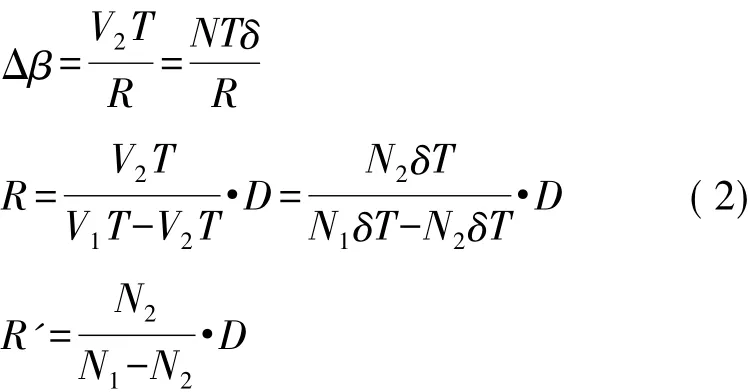
式中,N1,N2表示运算周期内编码器轮1、轮2的脉冲数;δ表示单位脉冲驱动轮前进的距离;T表示运算周期;式中变量x、y以及角度均是驱动轮距D和驱动轮旋转半径R的函数。在室内平整光滑的地面上,通过对左右驱动轮上编码器脉冲数的计算和对输入左右步进电机脉冲频率的控制,可以达到对机器人行为动作的控制。Δx表示运算时间内的直线运动距离;Δβ表示机器人围绕z轴旋转角度;Vl、V2表示两轮转动速度。
图12 机器人运动几何关系
2.2 系统软件层设计
软件设计包括应用软件层、系统软件层、CMSIS层、硬件抽象层。
2.2.1 系统PC客户端设计
为了节省空间,系统采用开放的无线网络云平台Yeelink,通过GPRS将数据上传到Yeelink的服务器,用户就能通过手机APP和电脑网页查看数据,同时还可以设置相关临界数值,当超越了临界数据就触发拨号功能来通知用户保证用户快速有效地接收到信息并处理。系统PC客户端采用QT编程,系统框架与界面如图13所示。显示各个节点的采集回来的参数、流媒体图像显示、机械臂的控制按键等。
图13 系统PC客户端软件框架与界面
2.2.2 机器人与节点系统软件一体化设计
系统软件实现功能主要包括节点与机器人系统通信以及机器人定位。软件流程如图14所示。
图14 软件设计流程图
为了方便各个节点之间的协调工作,系统后台处理集群采master-worker架构。master节点主要负责从节点的管理和任务的接收与分配。为了方便各个节点之间的协调工作,后台处理集群采用masterworker架构。master节点主要负责:计算节点的管理和任务的接收与分配。在计算节点管理方面,master节点维持一个从节点列表,列表中的节点采用“心跳机制”,每隔一段时间向master节点报告其工作状况,只有处于存活状态的计算节点才参与任务的执行。节点的负载CPU和内存的利用率评定按照式(3):

式中,η为利用率,w1、w2为主从节点权重,满足w1+ w2=1。
3 系统试验测试
3.1 数据采集测试
安防机器人收集节点采集到的数据并与本身数据融合后传输到系统主控板进行处理。PC端软件定时向服务器发送指令索取主控板数据。PC客户端软件所接收到的数据如图15所示。

图15 服务器接收到的数据与手机界面
3.2 通信功能测试
节点采集到的信息发送到主控板,判断是否为异常信息,若为异常信息,则将打电话给用户,如图15所示为用户手机接到报警的界面。根据系统主控板设定,拨打电话3次后或者用户挂断电话后,再发一条短信,告知用户情况。
3.3 超声波模块采样图
超声波有Trig和Echo两根信号线,如图16所示是采集到的超声波Trig和Echo的信号波形图。根据超声波从发射信号到接收信号所用的时间,根据公式d(距离)=t(时间)×340)/2(mm)计算出所需测量的距离。
图16 超声波模块引脚工作波形
3.4 电机驱动测试
如图17所示安防机器人在中等速度和高速行驶时的引脚控制波形。可知,高电平的占空比越高,安防机器人行驶的速度越快。系统通过控制该引脚占空比控制器人行驶速度。
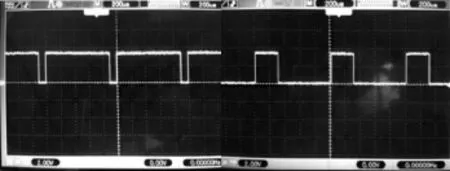
图17 电机中速与快速控制波形图
3.5 安防机器人机械臂测试
根据舵机的控制原理,舵机控制脉冲周期20ms,脉宽0.5 ms~2.5 ms分别对应舵机的0°~180°。如图18所示是机械臂上舵机的度数为90°时的引脚波形图,高电平的所占用的时间是1.5 ms。控制脉冲高电平的时间来控制机械臂运动状态。
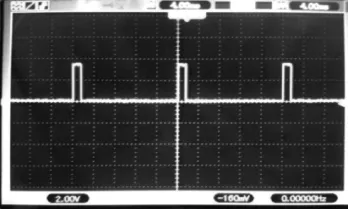
图18 机械臂控制波形图
实验证明,本文安防机器人系统实现了自动与手动双模式下任意方向避障行走,同时收集安防数据;机械臂已经实现了在自由度内完成各种较复杂的动作来处理险情;系统通过PC端上位机软件对安防机器人进行灵活控制,同时能够实时获取节点与安防机器人的传感器的数据,实现了双向管理。整个系统运行稳定可靠。缺点是依赖于目前中国移动、电信网络技术,通信有一定时延,长时间工作会有网络的堵塞,但对信息的传送基本不影响。
4 结论
本文研究的远程网络机器人系统面向智能家居安防工程的全方位服务,发展前景光明[19-20]。项目创新点如下:短距离WIFI等无线通信技术与远程网络化通信(GPRS、TCP/IP)集成用于本系统,系统功能强大;利用QT技术设计显示界面,显示、操作更加合理化与人性化;机器臂控制采用柔性技术设计理念,便于拾取危险物体或深度险情探测;项目融入了云计算技术,将上位机处理系统架设在云平台上,安防节点和机器人系统的一体化数据很容易上传到腾讯云服务器进行存贮与决策处理。实验证明了系统设计的先进性。
总之,项目将机器人技术、无线网络技术、云计算融合用于安防工程,并利用云平台的海量处理能力来解决机器人系统的控制问题,使其智能化、人性化程度都得到了很大提高。
[1]Das A N,Murthy R,Popa D O,et al.A Multiscale Assembly and Packaging System for Manufacturing of Complex Micro-Nano Devices[J].IEEE Transactions on Automation Science and Engi-neering,2012,9(1):160-170.
[2]Howard T M,Pivtoraiko M,Knepper R A,et al.Model-Predictive Motion Planning:Several Key Developments for Autonomous Mobile Robots[J].IEEE Robotics and Automation Magazine,2014,21(1):64-73.
[3]陈国良,黄心汉,周祖德.微装配机器人系统[J].机械工程学报,2009,45(2):288-293.
[4]赵杰,闫继宏.基于Internet多操作者多机器人的遥操作系统的研究[J].机器人,2002,24(5):459-463.
[5]李岩,曹琳,孙雷,等.竞争型网络机器人体系结构研究[J].机器人,2013,35(4):462-469.
[6]Han-Saem Park,Sung-Bae Cho.A Modular Design of Bayesian Networks Using Expert Knowledge:Context-Aware Home Service Robot[J].Expert Systems with Applications,2012,39(3):2629-2642.
[7]赵新,孙明竹,卢桂章,等.基于显微图像处理的微操作工具深度信息提取方法[J].自动化学报,2007,33(9):917-923.
[8]武二永,项志宇,刘济林.鲁棒的机器人蒙特卡洛定位算法[J].自动化学报,2008,34(8):907-911.
[9]田孝军,王越超,席宁,等.机器人化纳米操作系统驱动器驱动与探针定位研究[J].仪器仪表学报,2007,28(7):1223-1228.
[10]Sidney R D C,Filipe L de B C,Ubirajara F M.Topology Control for Connectivity Maintenance in Cooperative Mobile Robot Networks.IFAC-Papers on Line[C]//Volume 48,Issue 19,2015,Pages 280-
285.11 th IFAC Symposium on Robot Control SYROCO 2015—Salvador,Brazil,26-28 August 2015.
[11]Andrey V S,Wang Chao,Ahmad B,et al.Distributed Formation Building Algorithms for Groups of Wheeled Mobile Robots.Robotics and Autonomous Systems,2016,75(Part B):463-474.
[12]Cinara G,Cristian S,Carlos H C R,et al.Improving Robustness in Multi-Robot Networks.IFAC-Papers on Line,2015,48(19):63-68.
[13]Yesim O,Okyay K.Control of a Direct Drive Robot Using Fuzzy Spiking Neural Networks with Variable Structure Systems-Based Learning Algorithm.Neurocomputing,2015,149(Part B):690-699.
[14]Wang Yaonan,Mai Thanglong,Mao Jianxu.Adaptive Motion/Force Control Strategy for Non-Holonomic Mobile Manipulator Robot Using Recurrent Fuzzy Wavelet Neural Networks[J].Engineering Applications of Artificial Intelligence,2014,34:137-153.
[15]Michael B,Nicolas O,Nikil D,et al.A GPU-Accelerated Cortical Neural Network Model for Visually Guided Robot Navigation[J].Neural Networks,2015,72:75-87.
[16]Guo Peng,Jiang Tao,Zhang Kui.Novel 2-Hop Coloring Algorithm for Time-Slot Assignmentof Newly Deployed Sensor NodesWithout ID in Wireless Sensor and Robot Networks[J].Computer Communications,2012,35(9):1125-1131.
[17]Philipp M S,Brahim EM,Silvia S,etal.ConnectingWireless Sensor Networks to the Robot Operating System.Rocedia Computer Science,2013,19:1121-1128.
[18]Canedo-Rodrígueza A,álvarez-Santosa V,Regueirob C V,et al.Particle Filter Robot Localisation Through Robust Fusion of Laser,WiFi,Compass,and a Network of External Cameras[J].Information Fusion,2016,27:170-188.
[19]张颖超,段京易,胡摇凯,等.基于自然环境辨识的移动机器人位姿快速检测[J].电子器件,2014,37(5):876-881.
[20]赵力.基于WiFi的云机器人器件设计研究[J].电子器件,2014,37(2):367-372.

王骥(1972-),男,辽宁人,副教授,主要研究方向为无线传感器网络与无线通信技术;

谢仕义(1963-),男,教授,通讯作者。主要研究方向为物联网与数字海洋技术。
A New M ethod of Remote Indoor Security Based on a Network Robot*
WANG Ji,XIE Shiyi*,QIAN Jiandong,WANG Lianghong
(School of Information Guangdong Ocean University,Zhanjiang Guangdong 524088,China)
According to the requirements of the security engineer of smart home,we studied the key technology of design a remote security robot system.Firstly,short distance wireless communication technology WIFI and the remote network technology(GPRSand TCP/IP)were integrated to be used in robot systems,so the function ismore powerful;QT technology is used to design display interfacewhich the operation and display aremore reasonable and humanistic;We adopt the idea of flexible technology to design themachine arm whichmakes picking up dangerous goods and detecting danger more easily;The cloud computing technology was used for reserveing valuable information in tencent cloud,so the scalability of system is better.Experiments show that,when nobody is in home,the system takes activemodel to open the security system.If the accident has happened,the sensors send the alert data to MCU and MCU will call the user and send textmessages at the same time after processing,the user can open the client to monitor indoor circumstance by video and to control the robot taking action in time.The project integratesmany emerging strategy technology such as robots,Wireless network,cloud computing into the engineering ofwisdom family,So the system realizes the workingmode of network,intelligentization and humanization.
WIFI;TCP/IP;3G Communication technology;cloud computing;security robot
C:7230
10.3969/j.issn.1005-9490.2017.01.038
TP242
:A
:1005-9490(2017)01-0199-08
项目来源:广东海洋大学重大科研培养计划项目(GDOU2014050228);广东省自然科学基金项目(S2012010008261,2015A030313617);国家基金项目(61471133)
2016-01-15修改日期:2016-03-21
猜你喜欢
控制与信息技术(2022年3期)2022-07-08 13:29:42
网络安全和信息化(2018年2期)2018-11-09 01:16:18
电子制作(2018年17期)2018-09-28 01:56:38
电子制作(2016年11期)2016-11-07 08:43:30
军事文摘·科学少年(2016年7期)2016-09-20 16:49:54
电子制作(2016年21期)2016-05-17 03:52:47
水利科技与经济(2016年4期)2016-04-22 03:49:32
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
