
简易程控声波滤波器的设计与实现*
2017-09-06 10:55:41粟向军荣军陈松章小龙
电子器件 2017年1期
粟向军,荣军,陈松,章小龙
(湖南理工学院信息与通信工程学院,湖南岳阳414006)
简易程控声波滤波器的设计与实现*
粟向军*,荣军,陈松,章小龙
(湖南理工学院信息与通信工程学院,湖南岳阳414006)
设计了一个能对10 Hz~60 kHz的声波信号进行精确程控滤波器系统,该系统采用STM32F103单片机作为控制核心,使用精密运放NE5532构成电压跟随缓冲部分,提高了系统滤波的精确性。程控滤波器采用CMOS双二阶通用开关电容有源滤波器MAX262构成,可通过微处理器STM32F103精确控制滤波器的传递函数,在不需外部元件的情况下就可以构成各种带通、低通以及高通滤波器;系统性能指标精度比较高,工作可靠,人机交互以及用户界面非常友好。
滤波器;数字控制;功率放大
在声波信号处理过程中,输入信号通常是夹杂有复杂噪声的信号,而且噪声和干扰的频率是变化的,为了得到高信噪比的输出信号,就要求滤波电路具有智能程控滤波功能,即能够根据干扰、噪声频率的不同而改变信号处理电路的滤波器设置,从而获得比较高的信噪比的信号以供后级电路处理,从而提高整个系统的准确性以及稳定性,这种电路就被称为滤波器[1]。大部分有源滤波器通常由运放和RC独立元件构成,想改变输出频率特性的时候可以通过改变RC网络参数。使用运放和可改变元件参数的RC网络,可以方便地组成各种频率特性的滤波器,缺点在于对元器件的参数精度要求比较高,电路设计复杂,滤波器特性一旦设计完成,改变非常困难,在这种情况下,对于一些输入信号频率和幅度动态范围很宽,或者要求保证截止频率精度的场合使用受到限制[2-3]。为了解决以上问题,本文研究了一种简易的数字滤波器,可靠地提高了滤波器的性能和指标的同时避免了传统有源滤波器电路滤波特性参数精度不高、电路复杂、设计和调试麻烦等难题。
1 滤波器理论分析
设计滤波器的一般步骤是首先根据要求设计滤波器的特征指标比如中心频率、通带截止频率、阻带截止频率、衰减要求等,确定设计滤波器的主要参数比如Q值,以及传输函数,然后根据传输函数求得具体电路,真正的这种原始的滤波器设计方法,计算烦琐,很容易出错,且设计精度也不高,调试过程工作量大,整个工作周期长。现在很多模器件公司都有把这种低频段的有源滤波器做成集成电路,这样就大大的减少了滤波器的设计周期,且提高精度,参数改变也相对比较灵活。因开关电容有源滤波器的灵活性好,所以现在它的应用较为广泛。做得比较出色的有凌力尔特的LTC1068和美信的MAX260系列芯片,本文就选用基于MAX262设计的滤波器作简要的理论分析。
本文就以二阶低通滤波器(LPF)为例阐述其工作原理,图1为二阶压控型LPF原理图,其中二阶压控型LPF的传递函数为:

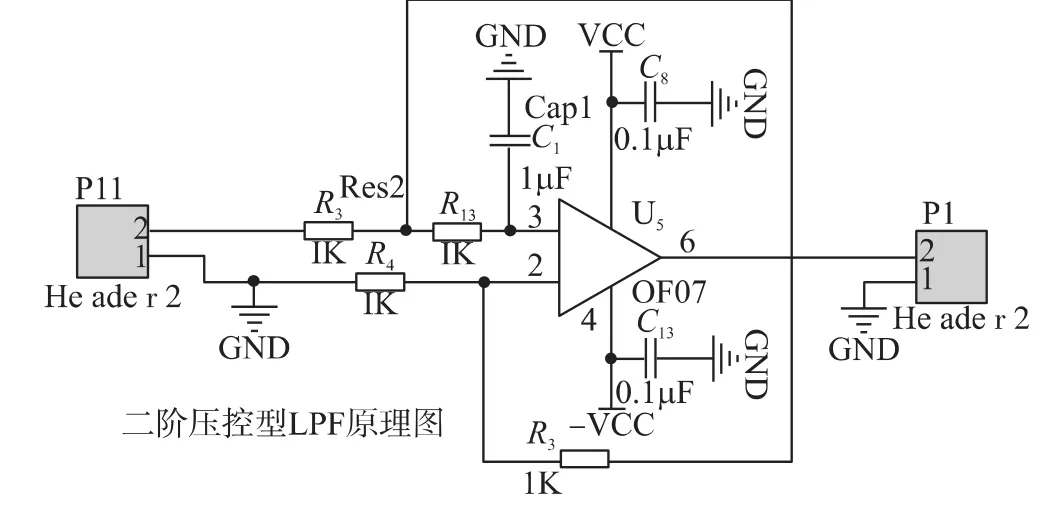
图1 二阶压控型LPF原理图
对于节点N,可以列出下列方程


上式表明,该滤波器的Avp只有比3小,其传输系统的极点才全部在左半平面,系统才不自激能稳定工作。将电阻电容电感转换到S域,继而根据运放的虚短虚断得到一个方程组,联立增益的定义,化简电路可得:

分析电路表达式之后可以发现在频率值f取到fo时,上式也就等价为:

有源低通滤波器的品质因数Q:值拐角增益与通带增益的比值:
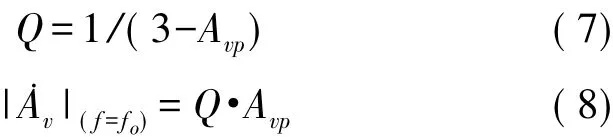
从上式子可知,在f=f0处的电压增益的模将大于通带增益(Avp),在f=f0处增益比值将变大,根据文献[4]。当Avp≥3时,Q=∞,对应到图上就是产生了一个极点,而且频率在右平面,所以有源滤波器将会自激。将C1直接跨接到输入与输出之间,等同于在高频端(低频时阻抗太大)给滤波电路加了正反馈,因此在高频端的增益数值(Au)将会有所抬
联立求解以上3式,可得LPF的传递函数:高,这样的话就有可能会引起自激。
由以上分析可知Q的大小对于系统的稳定性是非常重要的,根据二阶压控型低通滤波电路的幅频特性曲线可以了解:滤波器的品质因数Q,也即低通滤波器的截至特性系数,其值取决于f=f0附近的频率特性。按照f0附近的特性来看的话,可以把滤波器分为巴特沃斯、切比雪夫、贝塞尔3种类型,其Q值分别为0.707、1、0.56。众所周知巴特沃斯型滤波器是平坦度最好的,其在f0处无峰值单调减,切比雪夫型在f0处有点过冲,但是截至特性好,贝塞尔型滤波器虽然带宽有所降低,但是过渡特性好,相频无峰值。
本系统要求设计一个能对10 Hz~60 kHz的声波信号进行程控滤波的装置,低通部分的要求是: 1 kHz,3 kHz,30 kHz,60 kHz 4档,根据MAX262的DATASHEET可以得到低通的传递函数为:

Hopl为直流信号处的低通输出增益。程控滤波芯片MAX262的核心为采样系统fclk为其采样频率,根据二分频可知外部时钟为2 fclk,f0的取值为1 kHz,3 kHz,30 kHz,60 kHz,Q取参考值为1,然后根据文献[5]中的参考芯片手册的参考表格、表达式计算或者利用MAX26X系列专用软件进行数据软校正,为了防止采样后的信号频谱混叠,采样比按照奎特斯原理设为fclk≥2f0,但是为了更加使系统达到接近连续时间滤波的效果这里采用ratio范围为31至109,ratio越大则越接近理想连续时间滤波状态。MAX262滤波的输出有其不完善的地方,比如,时钟干扰,内部噪声等。在低通滤波电路的输出中会含有开关信号夹杂在输出信号中,呈现阶梯锯齿状,为了消除这类噪声特在MAX262的输出端加入一级单级点的低通滤波器,由于信号范围宽度为60 kHz左右,所以当采用ratio=50时,最小的采样率为1 kHz×50= 50 kHz,但是信号频率覆盖了50 kHz达到了60 kHz这就使得这个低通滤波器无法满足系统要求,在这里本文采用两组模拟低通滤波器用模拟开关控制分段切换滤波,保证了高精度和稳定性,在窄带内实现滤波精度是首要考察的因素。
2 数字控制滤波器软硬件设计
由于系统的输入信号是前级AGC模块处理后的含有噪声干扰的信号,因此为保证系统稳定以及减少级间干扰,该系统首先是对信号进行预处理,即用5532运放隔离前后级,减少级间干扰,然后采用后级的滤波电路滤除高频干扰和时钟噪声,而且将当前的设定值有12864液晶实时显示出来,由此我们可以知道,该系统总共由2部分模块组成,也就是程控滤波模块部分和跟随隔离、键盘以及显示模块的部分。整个系统以STM32F103单片机为控制器,将这3部分连接起来构成一个简洁的程控滤波信号处理电路,系统框架如图2所示。
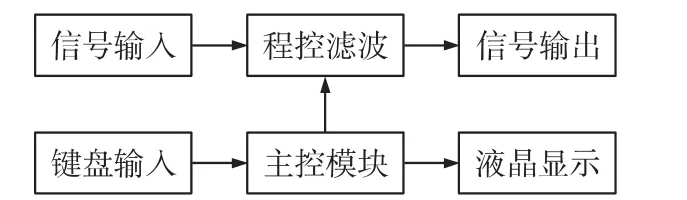
图2 系统总体框架
2.1 放大/缓冲电路设计
在很多信号采集系统中,为了保证系统的稳定性,一般采取前后级模块缓冲隔离的连接方式,一般的缓冲方式选择电压跟随电路,而电压跟随电路中运放的选择决定了其缓冲隔离的效果,一般的跟随运放选择的标准是优异的噪声性能,宽带宽,优秀的驱动能力,宽电源电压,低失调电压等。根据以上要求选择了运放NE5532作为缓冲,NE5532是高性能低噪声双运算放大器。与很多标准运放相似,但它具有更好的噪声性能,优良的输出驱动能力及相当高的小信号带宽,电源电压范围大等特点。此系统研究的是10 Hz~60 Hz的声波信号,以NE5532芯片32.81 ft的单位增益带宽积完全满足系统的要求,其具体电路如图3所示。
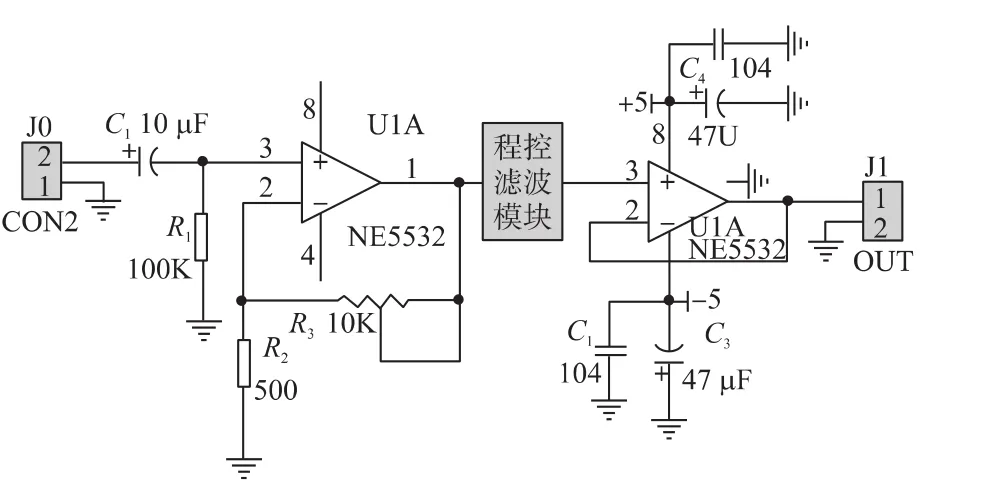
图3 增益/缓冲模块
2.2 滤波电路设计
程控滤波器以MAX262为核心,而MAX262则是双二阶开关电容有源滤波器,它由微处理器精确控制滤波函数即可构成低通、高通、带通等滤波器,且不需外部器件。MAX262含有两个二阶滤波器,可在控制下设置中心频率f0,品质因数Q和滤波器工作方式。输入时钟f0与6 bit编程输入代码一起可决定滤波器的中心或截至频率,Q值则可独立编程。滤波器的截止频率的调节可通过改变MAX262的时钟信号频率fclk与MAX262的频率控制字N来实现,设N为固定值,那么便可通过改变时钟信号频率fclk来控制滤波器的截至频率。本系统中采用MAX262时钟频率给定的工作方式,需要改变的只是滤波器的中心频率f0和品质因数Q值。根据芯片手册提供的外围电路,设计的MAX262滤波电路见图4所示[6]。
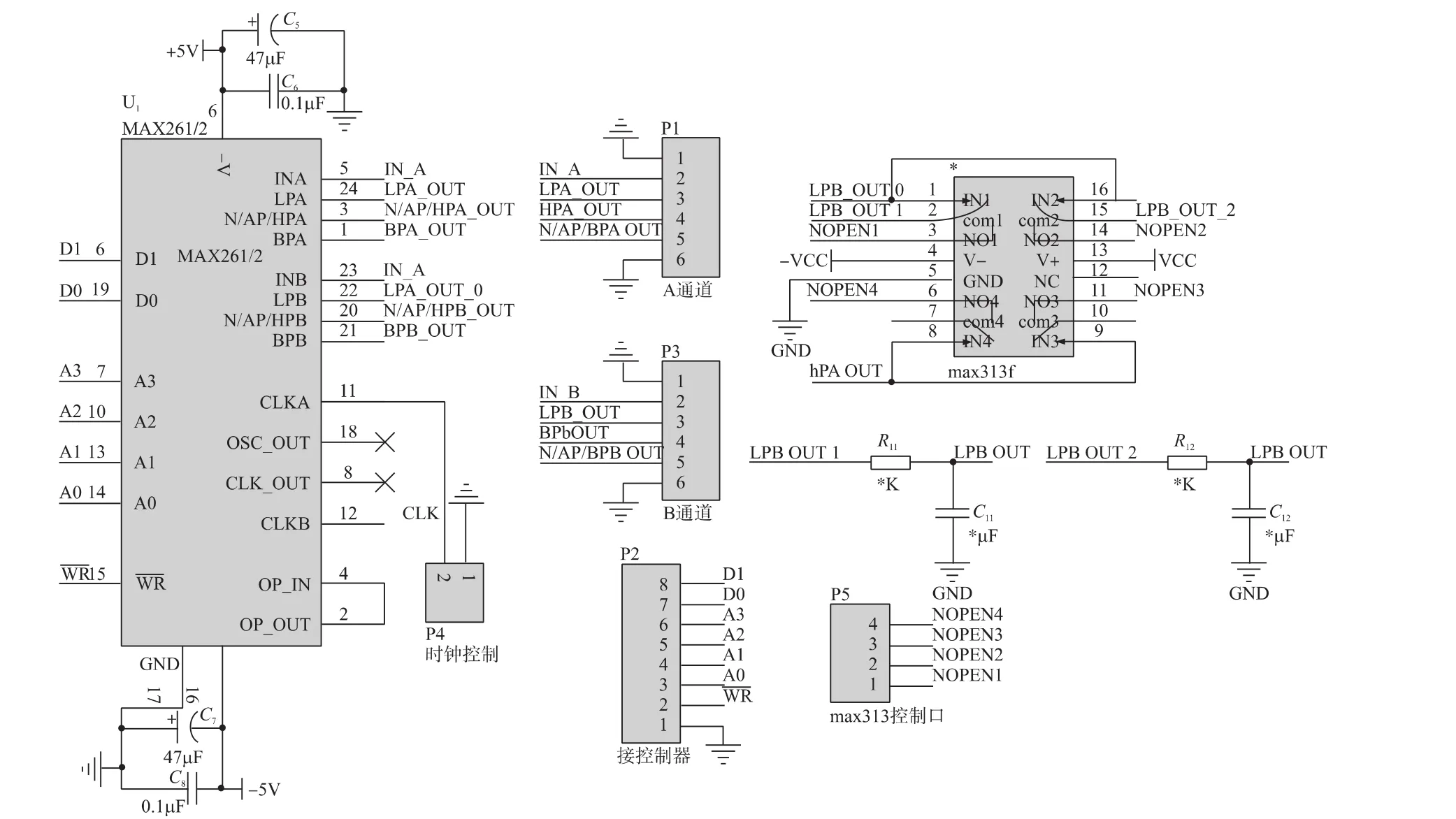
图4 基于MAX262的滤波电路
2.3 软件电路设计
根据滤波系统实现的功能,系统软件主要实现的功能有:(1)选择MAX262的高通模式,并通过理论计算或者通过MAXIM专用软件设置相应参数如f0、Q值等并转换成对应的N二进制代码;(2)选择程控滤波器的低通/带通模式,并如同(1)设置相应参数;(3)具有非常好的人机交互功能,并且显示当前系统工作的情况;设计采用模块化编程的基本思想,模块的内部采用层次化结构,将硬件接口程序以及各个功能模块的初始化程序作为最底层的子驱动程序来完成最基本的工作,整体实现方法是:控制硬件接口的中断矢量,并向上层提供接口以供上级程序读取数据,中间层程序完成底层数据的收集和处理并且将其处理结果最终上传至的上层功能控制程序;最后主程序作为“调度员”通过调用各个不同的中间层子程序来实现各种各样的组合功能。应用软件的总体结构如图5所示[7-8]。
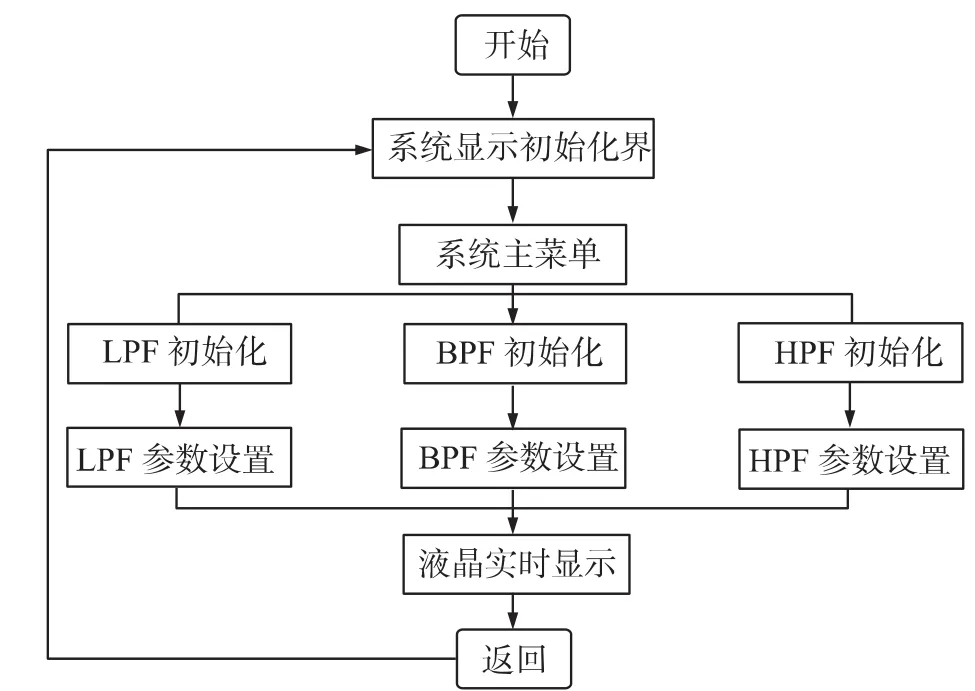
图5 系统软件总体设计框图
3 实验结果及分析
3.1 技术指标
本文要求设计一个能对10 Hz~60 kHz的声波信号进行程控滤波的装置,要求如下:(1)采用二阶开关电容巴特沃斯滤波器,实现程控带通滤波功能。(2)高通频率分四档:1 kHz,3 kHz,30 kHz,60 kHz。(3)低通频率分三档:10 Hz,500 Hz,2 kHz。本系统的数据测试主要包括两个部分:整机静态工作点以及MAX262滤波模块,具体测试数据类型包括有静态工作点电压值、信号频率值、幅度值等。使用的测试仪器有:Tektronix TDS1012数字示波器、胜利VC890数字万用表、SU3080函数发生器以及南京新联EE1251数字化扫频仪。
3.2 测量结果及分析
第1部分测试时静态工作点的测试,静态工作点是整个系统能正常运转的基本条件,并且静态工作点的稳定与否直接影响着系统的性能。测试方法:采用胜利VC890数字万用表主要对隔离缓冲模块的静态工作点以及MAX262芯片的电源引脚电压进行测量,测试结果如表1所示。
由表1中的数据可以看出,本系统的静态工作点电压值与理论值基本吻合,系统静态工作状态下稳定,基本满足系统要求。如需进一步提高系统精度,可在隔离缓冲模块中加入调零电路。

表1 静态工作点单位:V
第2部分测试是MAX262芯片的测试,本系统的核心部分就是MAX262芯片,其性能主要影响着该系统的精度。测试方法如下:采用SU3080函数发生器发出双路信号,一路为待测信号,另一路为同电压幅值的噪声信号;将两路信号通过外部加法器相加,具体电路如图6所示,然后送入MAX262芯片的输入端,通过HD7279按键选择滤波器类型以及具体参数:如Q值,截至/中心频率,通频带等参数;然后使用Tektronix TDS1012数字示波器或者南京新联EE1251数字化扫频仪对MAX262的输出信号进行测量并记录测试数据,测试数据如表2和表3所示。
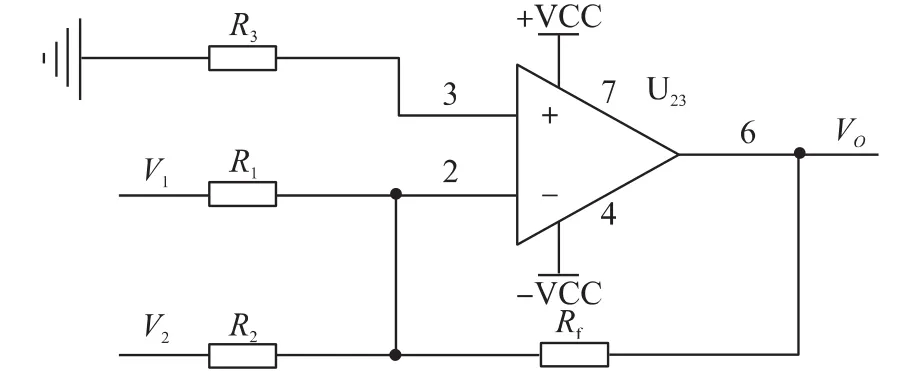
图6 加法电路
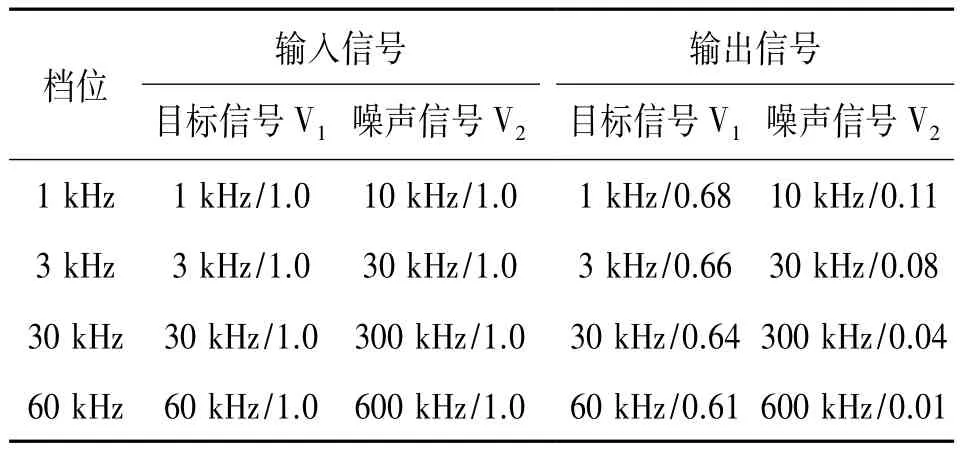
表2 MAX262 LPF测试数据单位:Hz/VPP
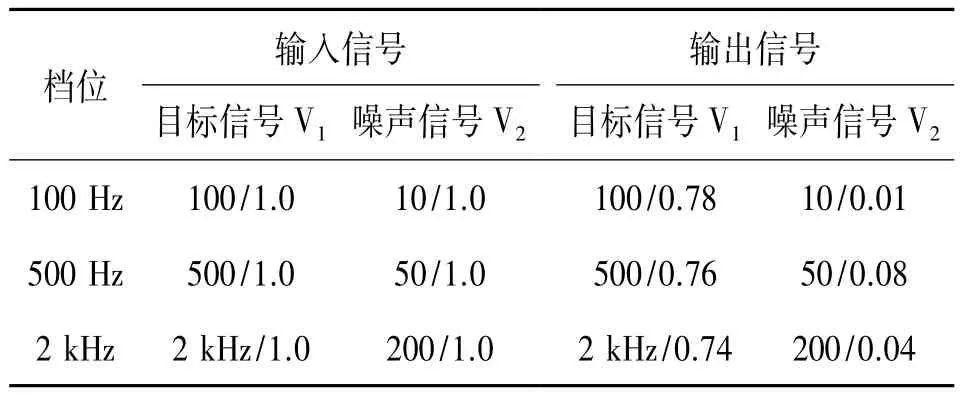
表3 M AX262 HPF测试数据单位:Hz/VPP
图6所示的电路为外部加法电路。实现了将输入两路信号进行相加混合,然后送入后级滤波电路。为保证信号是幅值无失真传输(由于输入信号为交流信号,且此处仅测量其频率与电压幅值),所以加法电路取两路增益均为单位增益,所以根据公式:

当Rf=R2=R1时,输出信号无电压幅度失真。
从表2和表3中的实验数据分析可知该滤波器系统性能接近理想连续时间滤波器的性能。在多次测量的过程中有极个别的数据误差较大,其他情况下均能满足系统设计要求。
4 结论
本文设计的针对10 Hz~60 kHz的声波信号的程控滤波器的设计与实现,对数据采集系统的输入信号进行前置处理,能实现输入信号的缓冲,高通、低通和带通滤波功能。当输入信号幅度变化时,通过前级的跟随隔离模块实现对后级滤波电路的稳定驱动以及与后级滤波电路的隔离,最终使输入信号幅度基本保持稳定;而对于输入信号频率的改变,借助单片集成可编程滤波器芯片的同时辅以简单的外围器件,采用编程数据来完成RC网络的切换,通过单片机编程对各种低频信号实现低通,高通(带通,带阻以及全通)滤波处理,而且滤波的特性参数如中心频率,品质因数等也可以根据不同的应用场合适当进行设置。因此本文设计的滤波器可以很好的应用于信号频率及幅度在宽范围内变化的场所,操作方便并且性能优良。
[1]高吉祥.全国大学生电子设计竞赛培训系列教程:电子仪器仪表设计[M].北京:电子工业出版社,2007:93-98.
[2]柴超.基于DSP的数字滤波器及应用系统设计与实现[D].辽宁工程技术大学,2005.
[3]张琴,李海华,程骏,等.基于ADS的微波带通滤波器的研究与设计[J].电子器件,2014,37(1):42-45.
[4]高健.基于DSP的数字滤波器设计[D].安徽大学,2005.
[5]http://www.cnblogs.com/yuesheng/archive/2011/08/19/2146127.html
[6]童诗白,华成英.模拟电子技术基础[M].北京:高等教育出版社,2006:246-249.
[7]王国杰,张惠,贺洪江.基于uC/OS-Ⅱ的数字示波器系统设计[J].自动化技术与用,2007,6:68-70.
[8]赵瑞林,卢庆林,张顺星.教学型双足步行机器人的结构及其控制电路设计[J].计算技术与自动化,2014,33(2):73-76.

粟向军(1964-),男,汉族,湖南邵阳人,硕士,教授,湖南理工学院信息与通信工程学院,410006,主要从事通信仿真技术研究;

荣军(1978-),男,汉族,湖南岳阳人,硕士,讲师,湖南理工学院信息与通信工程学院,410006,主要从事学生开关电源、电机控制以及学生考赛指导工作;rj1219@163.com。
Design and Implementation of a Simple and Program-Controlled Acoustic W ave Filter*
SU Xiangjun*,RONG Jun,CHEN Song,ZHANG Xiaolong
(Department of Information and Communication Engineering,Hunan Institute of Science and Technology,Yueyang 414006,China)
The programmable filtering system is designed to accurately control acoustic signal based on a 10 Hz to 60 kHz,and the system uses STM32F103 single chip microcomputer as the control core,and uses precise operational amplifier NE5532 constitute a voltage follower buffer which improves the accuracy of filtering system.The programmable filter is designed with CMOS dual two-order general switched capacitor active filter MAX262,and can use microprocessor STM32F103 to precisely control the transfer function of the filter.Itmay form all kinds of filters for example band-pass,low-pass and high pass filterswithout the need for external components.The performance index of the system is relatively high,reliable,human computer interaction,and the user interface is very friendly.
programmable filter;digital control;power amplifier
C:1270
10.3969/j.issn.1005-9490.2017.01.012
TM 46
:A
:1005-9490(2017)01-0061-05
项目来源:湖南省科技计划项目(2014GK2006)
2016-01-27修改日期:2016-02-26
猜你喜欢
计算技术与自动化(2024年3期)2024-10-10 00:00:00
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
电子制作(2019年19期)2019-11-23 08:41:36
电子制作(2019年11期)2019-07-04 00:34:38
电子制作(2018年19期)2018-11-14 02:37:02
电子制作(2018年16期)2018-09-26 03:26:50
电子制作(2016年1期)2016-11-07 08:42:54
电子制作(2016年23期)2016-05-17 03:53:28
火控雷达技术(2016年2期)2016-02-06 02:29:00
电测与仪表(2014年14期)2014-04-04 11:53:38
