基于RFID的货物行为姿态检测方法
2017-09-04 00:31王绍丹王宜怀
网络安全与数据管理 2017年16期
王绍丹,王宜怀,刘 锴
(苏州大学 计算机科学与技术学院,江苏 苏州 215000)
基于RFID的货物行为姿态检测方法
王绍丹,王宜怀,刘 锴
(苏州大学 计算机科学与技术学院,江苏 苏州 215000)
通过对射频识别(Radio Frequency Identification,RFID)在物流领域广泛应用现状及前景的分析,提出一种基于RFID的货物行为姿态检测方法。首先采用基于信号强度的加权质心定位算法对货物附着标签进行三维定位;然后扩充时间维度,获得姿态数据;最后,采用决策树分类方法对姿态数据进行划分,判断货物的异常行为。通过实验验证,该方法能够以极小的附加成本开销实现在途货物的行为姿态检测,具有较高的检测精度和实际应用价值。
货物姿态检测;射频识别;质心定位;特征分析
0 引言
货物行为姿态监测是对在途货物的位置、行为进行跟踪,在途货物相对于运输工具应当以平衡稳定的姿势保持相对静止的状态。货物行为姿态变化的种类较为简单,包括平衡、碰撞、翻转、平移、晃动。一旦货物出现非平衡状态的姿态改变,都可能引起货物损失甚至危险事故[1]。及时监测及记录这些货物行为的姿态信息就尤为重要,可以第一时间提醒运输者是否需要调整货物姿态或更换平坦路段,挽救损失。
而综合目前物流监控领域的研究现状,对货物运输途中行为姿态的跟踪,国内外均有研究。孙玉砚等人[2]提出了一种基于无线传感器网络和GIS(Geographic Information System)的智能物流追踪系统,提出了一种基于三维加速度传感器的货物行为姿态检测算法。该方法能检测到运输过程中货物的异常行为。但是,该方法利用三维加速度传感器进行测算,其成本较高,且在货物包装上放置加速度传感器不具有实用价值。
而对于其他运动物体,尤其是人类行为姿态的检测,已有较多研究,曹丽等人[3]通过在笔杆上安装加速度和角速度传感器,并利用三种卡尔曼滤波观测模型对比测算结果,给出一种笔杆的运动姿态检测方法。Yang Xue[4], Kratz S[5]等人也都分别利用加速度传感器进行人体运动和手势的姿态检测。
可以看出,利用加速度传感器配合分类算法能够较为精确地检测出物体姿态,但是对于货物行为姿态检测来说,货物在运输过程中的常态是相对于车厢静止,突发的异常姿态也是由于运输工具或道路的异常导致的,而足够引起人们关心的行为占比更是较少。因此,在货物包装上附加三维加速度传感器成本较高,且不具有拓展性和实用性。
无线射频识别(Radio Frequency Identification,RFID)是一种非接触式自动识别技术,利用无线射频信号实现数据传输和检索。其快速、非接触、体积小、可重复存取数据的出色表现,使其在产品质量追溯系统、物流可视化管理系统、智能化物流配送系统等物流领域得到了广泛的应用[6]。
本文设计了一种基于RFID的货物行为姿态检测方法。首先提出一种改进的定位方法,在连续的时间段内对货物所粘贴标签进行三维定位,建立货物三维姿态向量,其次利用本文提出的分类方法对姿态数据进行分类,判定货物异常行为。该方法能够以较小的附加成本实现在途货物的异常行为姿态检测,减少硬件复杂度,降低硬件布置成本,提高在途货物姿态检测精度。
1 RFID系统信道模型
RFID的接收信号强度(Radio Signal Strength Information,RSSI)是指读写器通过测量自身接收到的信号强度所给出的指示值。不同的模型[7]对测距结果影响显著,考虑到货物所处集装箱等容器的类室内场景,本文选择室内实际环境一般遵循的对数距离路径损耗模型[8]进行表示:

(1)
式中P(d)的单位是dBm,表示读写器与标签之间距离为d时的路径损耗;P(d0)表示近参考距离d0时的路径损耗;n为路径损耗因子,表明路径损耗随距离增长的速率,该值与环境相关,工程上会给出不同材料的路径损耗因子,也可以采取实验测量拟合曲线获得;Xσ表示标准偏差为σ、均值为0的正态随机变量。
信号的发射功率为PT,则有式(2):
P(d)=PT-RSSI(d)
(2)
其中RSSI(d)为距离为d时的信号接收功率。
因此,路径距离损耗模型换算成接收信号强度RSSI的形式为:
(3)
由此可以得到在该传播模型下,距离d与接收信号强度RSSI(d)的关系为:
(4)
2 RFID姿态检测算法
2.1 基于信号强度的加权质心定位
目前研究的三维定位算法主要是以二维定位算法为基础,扩充维数形成新的三维定位方法[9]。目前较为主流的三维定位算法是在二维的加权质心定位的基础上进行扩充的[10-11]。在二维加权质心定位算法中,以三个已知位置读写器A(xa,ya),B(xb,yb),C(xc,yc)为圆心,以所测信号强度推导的距离值d1,d2,d3为半径,在理想情况下,距离的估计值等于实际值,则三圆将交于一点,但实际环境中,由于噪声的存在,测得的信号强度偏小,估计值往往大于实际值,因此三圆相交形成如图1所示的一个区域。
在该模型下,可以将以三圆交点为顶点的三角形的质心M作为实际点o的估计值。

图1 三角形质心定位算法
类似地扩充到三维空间,若已知位置的非同一平面的四个锚节点坐标为A(xa,ya,za),B(xb,yb,zb),C(xc,yc,zc),D(xd,yd,zd),d1,d2,d3,d4分别为待测标签到四个锚节点的估计距离,首先计算四个球体的交点坐标。
其中,交点E的计算方法为:
(5)

而在传统三角形质心定位算法中,没有反映出读写器节点到标签的影响力大小,因此,本文设计了基于信号强度的加权质心定位算法,信号强度越大,说明两点间距离越近,越具有可信度。利用信号强度作为加权因子体现四个读写器节点对标签位置的影响大小,提高定位精度。计算方法如下:
若四个读写器节点的坐标分别为A(xa,ya,za),B(xb,yb,zb),C(xc,yc,zc),D(xd,yd,zd),待测标签的信号强度分别为RSSI1,RSSI2,RSSI3,RSSI4,根据距离信号模型获得与待测标签的距离分别为d1,d2,d3,d4。
通过式(5)可以计算四个估计的标签位置,即四面体四个顶点的坐标,E(xe,ye,ze),F(xf,yf,zf),G(xg,yg,zg),H(xh,yh,zh)。则待测标签的坐标为:
(6)
2.2 三维姿态向量
引入时间维度,在连续的时间间隔上检测待测标签的位置。若RFID采样率为H,极短时间内标签发生状态位移可看作匀速运动速度为v,则一个采样周期内标签移动距离为v/H。因采样频率远大于v,因此,可以认为在连续几次的采样内,标签位置不变。故可以对连续的T至T+t0(t0为一个较小的时间间隔)时间范围内的采样进行中位值平均滤波,以获得较为准确的采样信号。
设计初始向量和瞬时姿态向量。初始向量(TagID,NodeID,RSSI,T),通过读写器直接记录标签唯一EPC码TagID,读写器节点编号NodeID,信号强度RSSI以及当前系统时间T;通过信道模型和定位算法计算瞬时姿态向量(TagID,dx,dy,dz,ax,ay,az,T),dx,dy,dz为T时刻下待测标签的三维坐标,ax,ay,az为T时刻下三个方向上瞬时加速度,通过位置坐标与时间量计算获得。
设计一个滑动时间窗,时间窗长度为len,步长为1,对被检测姿态向量数据进行提取,计算Tstart到Tend时间内三个方向上的位移、加速度方差。综合分析瞬时姿态向量和时间窗内数据的统计特征及其相互关系,以获得较为准确的货物行为判别效果。
2.3 分类算法
根据姿态向量构造分类决策树,因碰撞行为的发生必然有其余三种异常行为作为前提,因此,树的叶子节点组成除碰撞之外的货物行为特征集合。如图2所示,首先以最明显的判别特征位移作为根节点,判别标准若max(Sx,Sy,Sz)>ST,则表示在时间窗内,X、Y、Z三个方向上位移的最大值是否大于阈值ST;若小于该阈值,则判定货物为平衡状态。

图2 分类决策树
若在某一方向或几个方向上的位移大于阈值,则需要对标签的加速度进行计算和判定,若时间窗内加速度最大值大于阈值即max(ax,ay,az)>aT,则判定为翻倒。
否则,判断在时间窗内加速度波动程度,即对加速度方差进行判定,若任意方向加速度方差最大值小于阈值VT,说明在该时间段内加速度波动较小,判定货物移动。若任意方向加速度变化较大,则判定为晃动行为。
从货物出现异常行为开始,对接下来一个时间窗Tstart到Tend时间内的加速度数据进行分析,当某一方向上加速度波动较大,即方差max(V(ax),V(ay),V(az))>RT时,判定货物发生碰撞行为。若该时间窗内未发生撞击而仍为异常状态,则继续对下一个时间窗进行撞击分析,直到检测到撞击行为或者在连续n个时间窗内均被判定为稳定状态。
3 实验验证和结果分析
3.1 硬件环境搭建
本文设计了一套集装箱内货物姿态检测的简化模型,选择了识别距离在1 m的超高频RFID读写器KLM900模块与超高频不干胶标签(48 mm×22 mm)。读写器工作频率为840~960 MHz,使用TTL-RS232接口,串口波特率为115 200 b/s,采样频率为33 Hz。
3.2 RFID信号衰减验证
在简单空旷的实验场地,针对所选型号的读写器与RFID标签进行信号衰减实验,利用中位值平均滤波法,降低RSSI误差值,建立信号强度与距离的关系模型,并对模型拟合程度进行测试,图3为预估数据和实际数据的比较值。
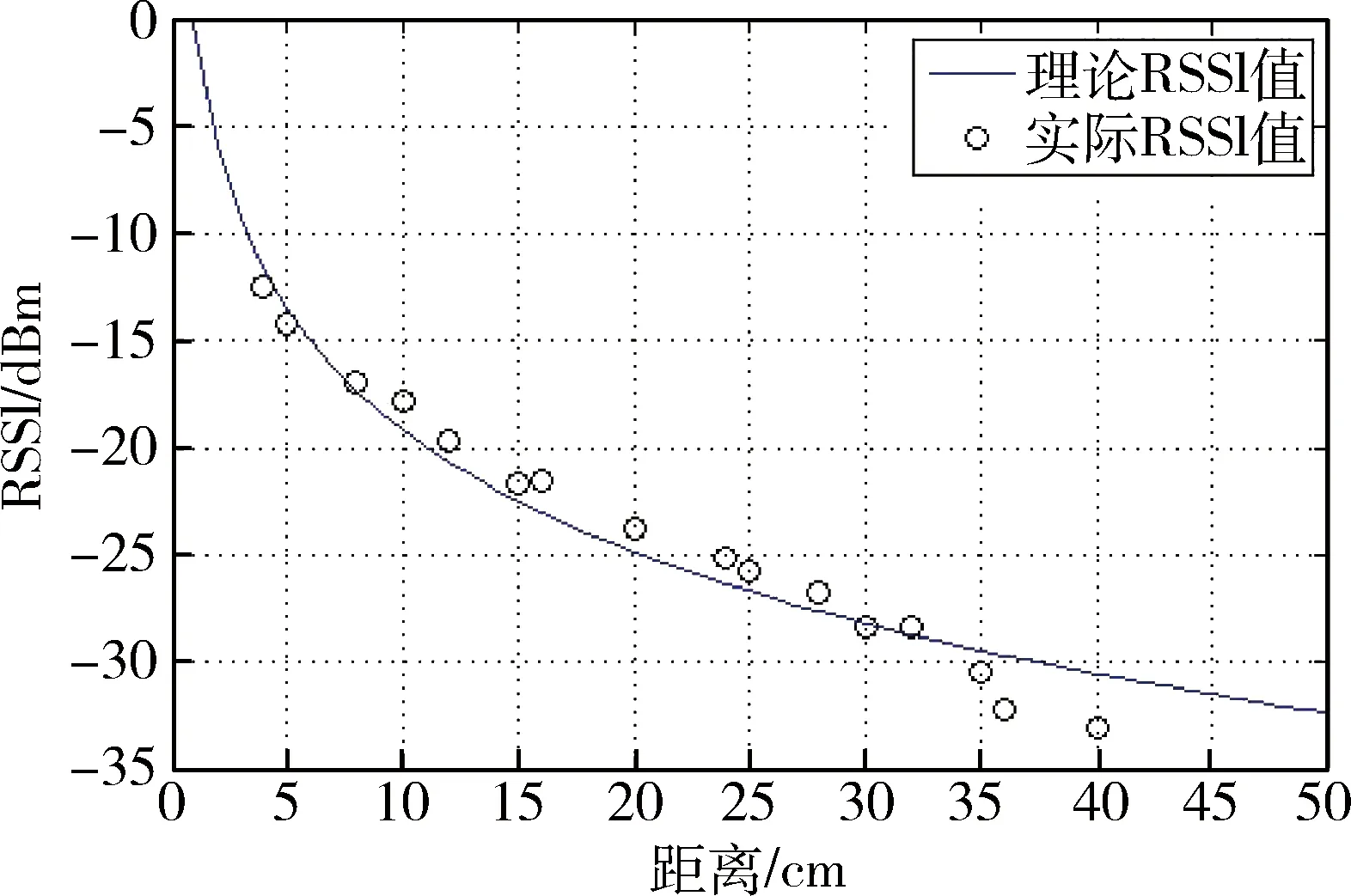
图3 RSSI与距离关系曲线图
实验结果表明,经过滤波后的模型在有效测量范围内拟合程度较好,可以利用该模型建立RSSI与距离的关系,以进行后续实验。
3.3 实验结果分析
为方便收集不同行为下货物的姿态数据,实验设计在一个厚重的物块顶部粘贴一个RFID标签,模拟货物,利用一个纸箱模拟货物集装箱,在纸箱底面一边中点及其对边的两个顶点分别放置三个读写器,在纸箱顶部中心放置一个读写器,货箱处于静止状态。
模拟货物在运输过程中可能发生的四种异常行为,对物块(货物)施加不同的动作,使物块发生不同幅度的翻倒、撞击、晃动、移动四种行为各30次,充分模拟实际运输过程中可能发生的情况。记录货物行为、开始时间和结束时间。采集读写器信号强度及对应时间并通过串口上传至PC中,进行货物行为姿态的检测。算法中参数设置为:len=10,aT=3g,VT=1.5,ST=0.1 m,RT=10。
对实验数据进行检测分类后,得到如表1所示的检测结果。

表1 货物异常行为实验检测结果
从实验检测结果分析,简单货物姿态检测的平均正确率能达到94.2%,较大幅度的翻倒行为基本可以100%被正确检测。但轻微幅度的移动和晃动行为可能被忽略或误判,轻微的撞击可能被误判为晃动。从总体来看这四类异常行为检测的正确率都能达到86%以上,基本满足货物姿态检测的需求。
4 结论
本文提出基于RFID的货物行为姿态检测方法,利用RFID信号强度,间接实现在途货物的行为姿态检测的需求。比起采用较高成本的加速度传感器,本方法采用目前已经在物流信息化中大规模使用的RFID标签,标签成本远远低于加速度传感器,且不影响RFID标签数据读写的自有功能。成本较高的读写器为一次性投入,总体设计具有良好的应用前景,有效提高物流信息化和智能化水平。
[1] 袁开福,龙良珠.家电物流企业货物破损控制问题分析[J].对外经贸实务,2011(6):84-86.
[2] 孙玉砚,杨红,刘卓华,等. 基于无线传感器网络的智能物流跟踪系统[J]. 计算机研究与发展,2011,48(S2):343-349.
[3] 曹丽,刘扬,刘伟. 利用加速度计和角速度仪的笔杆运动姿态检测[J]. 仪器仪表学报,2008,29(4):831-835.
[4] Yang Xue, Jin Lianwen. A naturalistic 3D acceleration-based activity dataset & benchmark evaluations[C]. International Conference on Systems Man and Cybernetics(SMC), 2010:4081-4085.
[5] KRATZ S, ROHS M. The $3 recognizer: simple 3D gesture recognition on mobile devices[C]. International Conference on Intelligent User Interfaces, 2010, Hong Kong, China, 2010:419-420.
[6] UCKELMANN D. Quantifying the value of RFID and the EPCglobal architecture framework in logistics[M]. Springer Publishing Company, Incorporated, 2012.
[7] 朱明辉, 张会清. 基于RSSI的室内测距模型的研究[J]. 传感器与微系统, 2010, 29(8):19-22.
[8] KATIRCIOGLU O, ISEL H, CEYLAN O, et al. Comparing ray tracing, free space path loss and logarithmic distance path loss models in success of indoor localization with RSSI[C]. Telecommunications Forum, 2011:313-316.
[9] 王长征, 汤文亮, 徐燕. 无线传感器网络中四面体三维质心定位算法[J]. 传感器与微系统, 2012, 31(8):141-143.
[10] 梁小满, 姜小奇, 李英玲. 无线传感器网络节点的三维质心定位算法研究[J]. 通信技术, 2009, 42(2):121-123.
[11] 陈瑞鑫, 邹传云. 有源RFID定位系统设计与实现[J]. 电子技术应用, 2010,36(10):114-116.
A detection method of cargo attitude based on RFID
Wang Shaodan, Wang Yihuai, Liu Kai
(School of Computer Science and Technology, Soochow University, Suzhou 215000, China)
Through the analysis of the application status and prospect of Radio Frequency Identification (RFID) in logistics field, a kind of behavior and attitude detection method based on RFID is proposed. First of all, the weighted centroid localization algorithm based on signal strength was adopted to locate the three-dimensional positioning of goods attached label. Then attitude data was obtained after extend the time dimension. Finally, decision tree classification method was used to divide the attitude data, to determine the abnormal behavior of the goods. Experiment verification shows that the method is able to detect the behavior of cargo in transit with minimal costs, with high accuracy and practicality.
cargo attitude detection; radio frequency identification; centroid localization; characteristics analysis
TP274; TP391.4
A
10.19358/j.issn.1674- 7720.2017.16.004
王绍丹,王宜怀,刘锴.基于RFID的货物行为姿态检测方法[J].微型机与应用,2017,36(16):11-14,18.
2017-02-28)
王绍丹(1991-),女,硕士研究生,主要研究方向:无线传感网、RFID技术、物流信息技术。
王宜怀(1962-),男,博士,教授,主要研究方向:嵌入式系统、传感网与智能控制技术。
刘锴(1991-),男,硕士研究生,主要研究方向:嵌入式系统、电机控制系统。
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
中成药(2022年1期)2022-01-27
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
现代测绘(2018年1期)2018-03-06
测绘通报(2016年9期)2016-12-15
中国交通信息化(2014年4期)2014-06-05
北京航空航天大学学报(2013年6期)2013-12-19
中州大学学报(2010年5期)2010-01-29