基于LADRC的A3000过程控制实验系统探究
2017-09-03 06:08周宣征张公永
实验室研究与探索 2017年8期
周宣征, 张公永
(滨州学院 电气工程系,山东 滨州 256600)
基于LADRC的A3000过程控制实验系统探究
周宣征, 张公永
(滨州学院 电气工程系,山东 滨州 256600)

利用LADRC对A3000过程控制系统进行改造,运用实验计算出被控对象数学模型,设计自抗扰控制系统,进而按照A3000控制系统实际参数搭建仿真模型,求取控制参数,实验结果验证了对实验系统改造的可行性,该次实验设备的改造适应了工业控制技术的发展对高校实验教学的新要求,促进了过程控制实验项目的开放性、创新性,教学模式的改革,有利于我校创新型与应用型人才的培养,节约了高校实验设备更新成本,为我校实验设备更新提出新思路。
线性自抗扰控制; 过程控制实验系统; 改造研究
0 引 言
工业过程控制与自动化仪表实验是电气工程及自动化专业的专业核心课程,在培养应用型人才方面起着非常重要作用[1-2]。作为专业核心实验课程,需要有部分开放性、研究性实验,另外随着工业控制技术的发展,作为控制核心课程的实验教学设备亟需更新创新[3-5]。基于以上理念,本文通过自抗扰控制技术对过程控制实验的A3000控制系统进行改造,为实验项目的开放性、创新性,教学模式的改革提供了有利条件,节约了我校实验设备更新成本。
ADRC(自抗扰控制)技术是适应数字控制时代潮流、吸收现代控制理论成果、发扬并丰富PID思想精髓(“基于误差消除误差”)、开发运用特殊非线性效应来发展的新型实用技术。自抗扰控制技术的核心是把系统的未建模动态和未知外扰作用都当作对系统的“总扰动”,并对它们进行估计并给予补偿。其优点在于对系统内、外扰的鲁棒性好,动态响应快且无超调,具有较高的使用推广价值。美国克利夫兰州大学的高志强教授对ADRC进行多年研究,指出了正常运行时,ADRC基本运行在线性区,提出了线性自抗扰控制技术LADRC(Linear Auto Disturbance Rejection Control technique),简化了参数整定,应用性较强[6-11]。
A3000控制系统包括A3000现场系统,控制柜,上位机组成,其中现场系统包括3个水箱,1个锅炉,1个强制换热器,2个水泵,2个流量计,1个电动调节阀。其他还包括加热管,大水箱,如图1所示。 A3000控制系统(A3000-CS)包括了传感器执行器I/O连接板、3个可换的子控制系统板,第三方控制系统接口板,上位机主要装有组态王。

图1 A3000现场系统结构图
1 实验系统的改造方法与步骤
(1) 通过实验的方法获取被控对象的传递函数。
(2) 自抗扰控制系统设计。
(3) 根据自抗扰原理及自抗扰控制器的数学模型,搭建simulink仿真模型。
(4) 通过仿真验证,获取控制器的控制参数。
(5) ADAM-5510EKW/TP控制器调试。
2 被控过程传递函数求取
通过对下水箱做阶跃响应实验,记录阶跃响应曲线,根据数学模型结构,处理阶跃响应曲线数据,得出模型参数[12-13]。
设定调节阀的开度为u,水箱的液位高度为h,根据动态平衡关系,并进行拉式变换后,可以得到被控过程的传递函数为
(1)
通过上位机组态王软件设置电动调节阀的开度35%,固定水箱挡板的位置不变,上电后待水箱里面的水位稳定后记录相应的液位高度与稳定时间,响应曲线如图2所示。其中PV代表液位高度h。

图2 响应曲线图
由h(s)反拉式变换知,h(T)=0.632h(∞),由图得T=1 s,故
3 自抗扰控制系统设计
根据上述所求传递函数及存在扰动情况下,被控对象的微分方程为:

(3)

(4)
构造系统结构如图3所示,主要由被控对象,扩张状态观测器(ESO),KP环节及b环节构成。
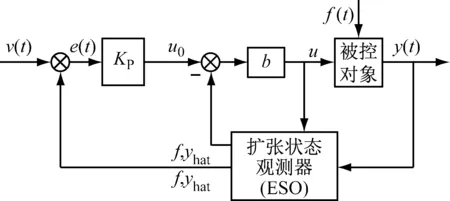
图3 LADRC系统图
上式中,令式(3)、(4)x1=y,x2=f,由式(3)得:
对象的输入输入输出关系方程:
(5)
观测器的方程为:

(6)
观测器利用对象输入输出的数据估计出对象的状态方程为:
(7)
(8)
(9)
系数矩阵为:
参数l1、l2通过系数矩阵A的特征根求得:

4 仿真分析
根据上述原理,建立自抗扰控制系统的仿真模型,如图4仿真模型所示,扰动信号模拟水泵1的流量,设置wo=40,wc=150,其他参数依据A3000控制系统的实际参数设置。仿真结果图5中y为系统输出,yhat为扩张状态观测器对输出的估计量,target为系统理想输出值,图6中为扰动信号及扩张状态观测器对扰动信号的估计量。从仿真结果可以得到如下结论。
(1) 图5仿真结果可以看到系统的输出值存在较高的动态性能和准确性,只是在扰动出现的瞬间存在超调,大约持续0.2s时间,系统输出趋于稳定,也说明LADRC技术可以很好对扰动给与补偿,消除扰动。
(2) 从图5中yhat及y的曲线与图6扰动及扰动估计曲线可看出,扩张状态观测器能够较好对系统输出与扰动进行观测,为控制器对扰动信号进行补偿提供有利条件。
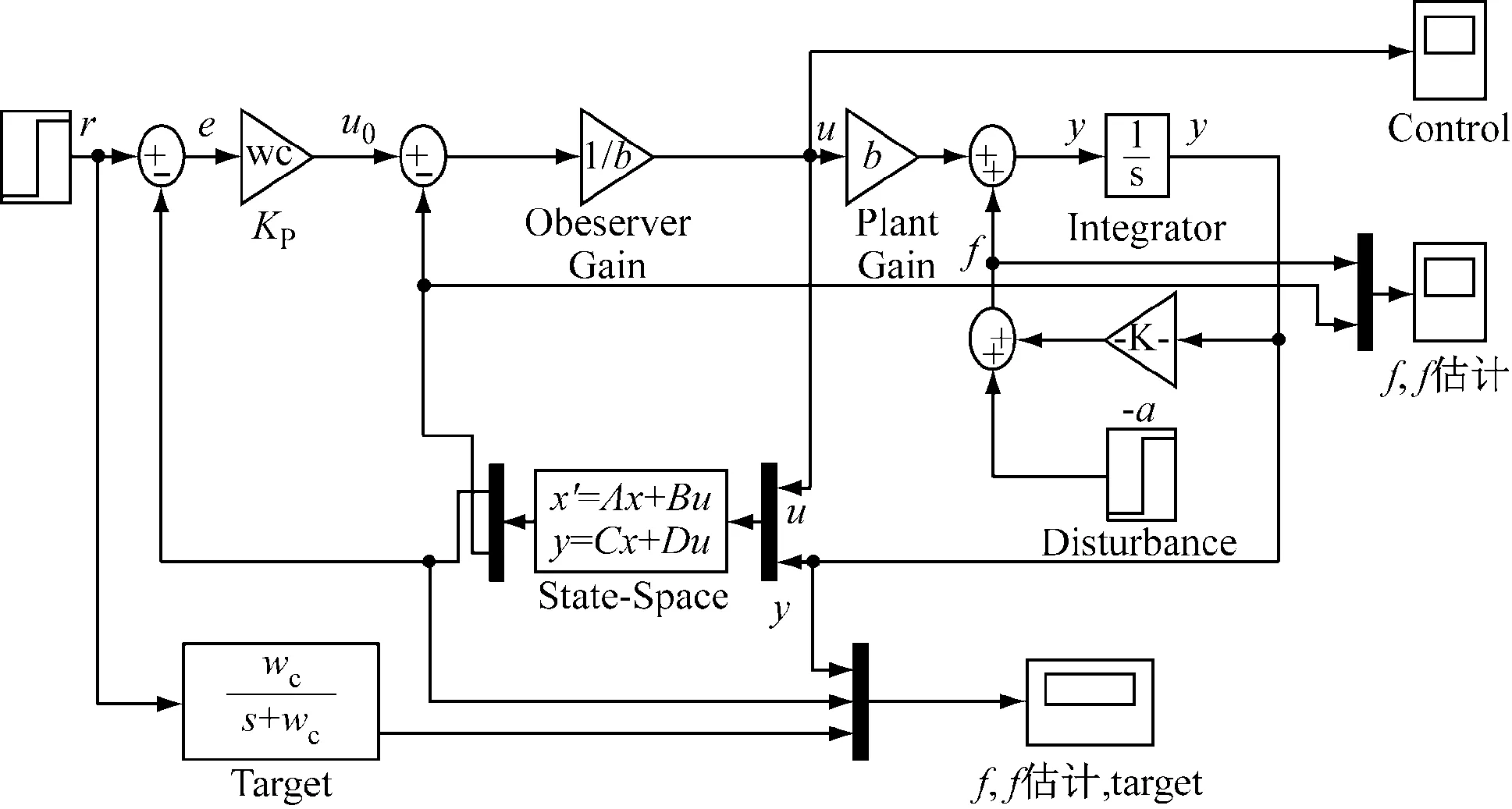
图4 仿真模型
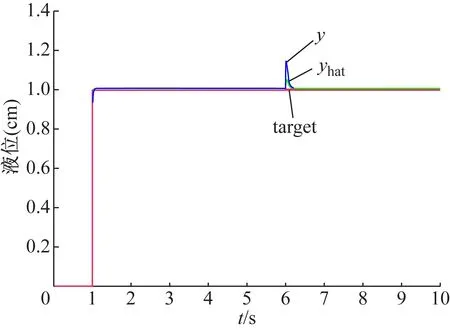
图5 系统仿真结果1
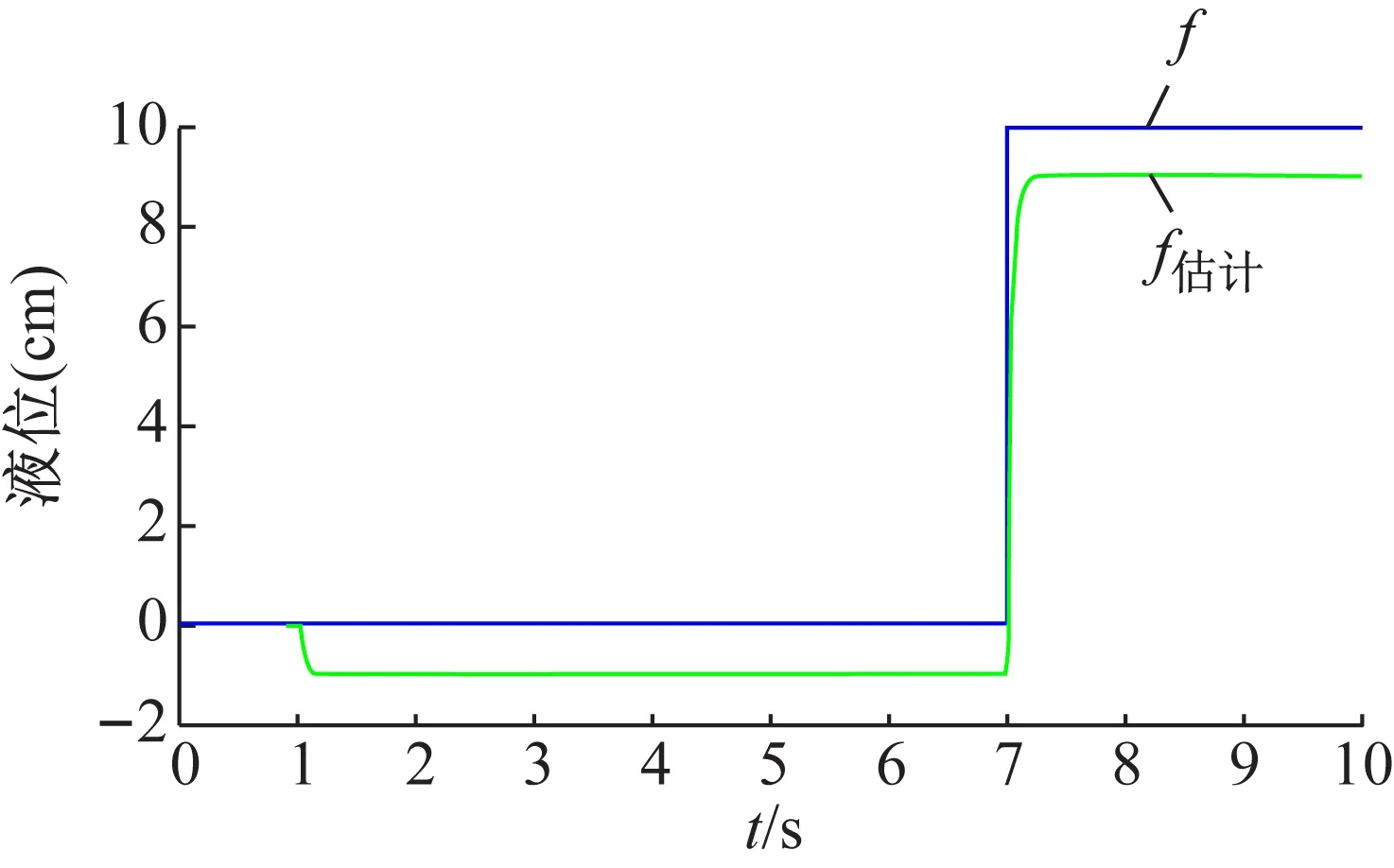
图6 仿真结果2(f及f估计)
5 实验验证
通过对ADAM-5510EKW/TP控制器编程并与组态王连接,实验结果如图7所示,其中SP为设定值,

图7 实验结果
PV为液位值,实验结果具有良好的动态性能,体现出对设备改造的可行性与有效性。
6 结 语
利用LADRC技术对A3000过程控制系统进行改造研究,通过仿真与实验分析具有良好的实验效果。该实验设备的改革适应了高校实验教学对工业控制技术对新技术发展的要求,促进了过程控制实验项目的开放性、创新性,教学模式的改革,有利于我校创新型与应用型人才的培养,节约了高校实验设备更新成本,为我校实验设备更新提出新思路。
[1] 王晓芳,孙旭东,张继研.过程控制工程实验项目开发与教学改革探讨[J].实验室科学,2013,16(5):79-84.
[2] 李 敏. 真实模型Matlab仿真的过程控制系统实验研究[J]. 浙江工业大学学报,2011, 39(2):168-173.
[3] 王 娟,钟 秦,懂 旭.A3000系统在化工自动化及仪表实验中的应用[J].实验室研究与探索,2006,25(9):1079-1080.
[4] 贾鸿莉,刘 强,董德发,等.A3000过程控制实验系统开发-多容液位PID控制系统[J].现代电子技术,2006,17:208-210.
[5] 王银锁,张德泉,李红萍.A3000液位控制系统的设计[J].工业仪表与自动化装置,2011(4):61-63.
[6] 周宣征,张宝国. 自抗扰控制器的参数整定研究[J]. 电气自动化,2014,36(2):23-24.
[7] 周雪松,田程文,马幼捷. 基于LADRC的SHAPF模型及其电流跟踪控制策略[J]. 电力自动化设备,2013,33(4):49-54.
[8] Gao zhiqiang. Scaling and bandwidth parameterization based controller tuning[C]∥Proceedings of the 2003 American Control Conference.USA:2003:4989-4996.
[9] 韩京清.自抗扰控制技术—估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008.
[10] 王 琳,张根宝.自抗扰控制器在双容水箱中的应用[J].计算机测量与控制,2013,21(3):775-778.
[11] 韩京清.从PID技术到“自抗扰控制技术”[J].控制工程,2002,9(3):13-18.
[12] 郭 婵.A3000过程控制实验仿真系统的开发[D].青岛:中国石油大学(华东),2008.
[13] 李 军.A3000系统的云模型控制[D].镇江:江苏科技大学,2013.
The Research on A3000 Process Control Experimental System Based on LADRC
ZHOU Xuanzheng, ZHANG Gongyong
(Department of Electrical Engineering, Binzhou University, Binzhou 256600, Shandong, China)
The LADRC is used to modify the A3000 process control system. Mathematical model of the object is calculated by experiments. An ADRC system is designed, simulation model is built according to the actual A3000 control system parameters, and these control parameters are calculated. Experimental results show the feasibility of the modification experiment system. The experimental equipment reformation is to fit the new requirements of experimental teaching in university and the development of industrial control technology, and promotes the openness and innovativeness process control experiment reform of teaching mode. It is beneficial to cultivate creative and applied talents in our school, saves the cost of updating the experimental equipment at university, and puts forward new ideas for updating experimental equipment.
linear auto disturbance rejection control technique(LADRC); process control experimental system; modification research
2016-11-28
国家安监局2015年重大事故防治关键技术科研项目(shandong-0056-2015AQ);滨州学院青年教师创新项目(BZXYQNLG2011)
周宣征(1982-),男,山东滨州人,硕士,讲师,研究方向为电力电子和电力系统自动化。
Tel.:15169979606;E-mail:tjlgaoyun@163.com
TP 301
A
1006-7167(2017)08-0052-03
猜你喜欢
猪业科学(2021年6期)2021-08-12
金桥(2020年11期)2020-12-14
电子制作(2017年19期)2017-02-02
工业设计(2016年11期)2016-04-16
工会信息(2016年1期)2016-04-16
铁道科学与工程学报(2015年5期)2015-12-24
广东海洋大学学报(2015年3期)2015-12-22
深空探测学报(2015年3期)2015-12-07
小雪花·成长指南(2015年10期)2015-10-23
电测与仪表(2015年19期)2015-04-09