基于R B F神经网络的滑模变结构机器手控制
2017-08-30 00:17:22东华理工大学机械与电子工程学院席亚军田雪丰
电子世界 2017年15期
东华理工大学机械与电子工程学院 席亚军 夏 洪 田雪丰
基于R B F神经网络的滑模变结构机器手控制
东华理工大学机械与电子工程学院 席亚军 夏 洪 田雪丰
一般而言,我们通过设定机器手各关节的驱动力矩进一步对机器手轨迹进行跟踪控制,在这种很费力的方法下来使得机械手的运动逼近期望轨迹[1]。不可避免的是大量实践表明抖动还是会普遍产生,会在机械手启动的时候产生很大的影响,我在阅读及分析大量文献的前提下,应用新型的基于RBF神经网络的新型滑模变结构机器手轨迹跟踪控制方法,最终的结果,还是通过MATLAB进行仿真,依据仿真可以看出这种新型结构可以很好的降低抖振。
滑模;变结构;RBF神经网络;期望轨迹;抖振;MATLAB仿真
0 引言
机器人的稳定控制系统在机器人设计中起到非常重要作用,在设计中需选用哪种稳定的控制方案,我们应视具体的被控对象还有环境作为依据。很早时候国外专家Utkin完整的提出了滑模(Slide Mode)变结构控制,在当时技术条件下他们主要是依靠开关的切换进一步的实现改变系统结构,从而一点一点的到达均衡点[1]。不可否认的是原理上不可避免变结构开关抖振,通过大量的实验数据及分析可知不能彻底地去掉它,所以在当时的技术条件下仅仅相对的削弱一小部分,可以这么说,系统的动态性能的好坏也是由抖振的大小决定的。
1 变结构基本原理
通过实验研究只要能够满足系统的稳定性标准,设计者在设计滑模面时可以提出有差别很大的设计结构,这些其实不是多重要,然则不管何种滑模面都很大程度地影响系统的动态特性。我们首先建立恰当的原理模型,令线性滑模、非线性滑模的形式为:

在以上的公式中定义c为滑模系数,x为系统状态[2]。基于前人的分析及其后续的工作研究,不难发现抖振产生的根本是系统在运动的时候,当运动点一点一点的靠近切换面的时候,自然界中惯性的存在不可避免的使运动点不仅到达切换面而且还穿透了,抖振就这样不可避免的发生了,故我设计采用基于RBF神经网络方法进一步消弱抖振。
2 轨迹跟踪控制

3 神经网络滑模控制及其仿真
本节采纳RBF神经网络来实现减弱抖振的问题。径向基函数神经网络(RBF)是一前馈网络,现如今随着技术的发展,其适应于生产生活的各个方面范畴。RBF网络滑模变结构控制如图1所示。

图1 RBF神经滑模控制器
对于RBF神经滑模控制的算法,为了更好的看出实验仿真效果及以后更加优异的改进,故此先设计采用一个力臂机器手当作为被控对象[3],我们基于以上的分析可以很容易的得出单力臂机械手的动力学模型为:
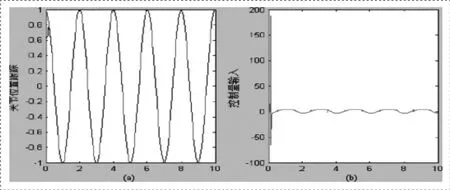
图2 关节位置跟踪及其控制量
仿真表明加了RBF网络的控制系统,其降低了输入控制量的大小,同时降低了系统起始时刻的控制量,其实在部分工业领域中即使在很小的时间内,这个时间短到在机械领域中可以忽略,但是却也会产生很大的影响。就是这个条件下使机器人的运动点到达滑模面上,可以很快的复位到平衡点。不言而喻的是通过我这种RBF网络滑模控制器的新型设计可以很大程度的降低抖振,下一步只要我们充分的利用这种设计可以更好的改善机器人的一些特点性能及其应用于生产生活中。
4 总结
本文从理论分析开始,不断的提出新型的设计方案,不断的验证。查阅大量资料得出更加实用的知识。我大量的论述了滑模变结构的基本原理及在生产生活中可能会出现的部分问题,及如何解决这些无法避免的问题。选用新型的未来会有更多应用的机械手作为本设计的研究对象。经过大量的数据得出基于RBF神经网络的滑模变结构机器手轨迹跟踪控制方法,其真正的应用领域在以后的进一步更加完善的改进之后会大面积的普及,从仿真中可以看出系统在稳态性和定位精度方面得到了相当可观的提高。
[1]刘金琨.机器人控制系统的设计与MATLAB仿真[M].北京:清华大学出版社,2005.
[2]张袅娜,冯勇,孙黎霞.双臂柔性机械手的终端滑模控制[J].控制与决策,2004,109(10):1142-1146.
[3]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
夏洪(1958—),江西抚州人,副教授。
席亚军(1992—),江苏徐州人,硕士研究生。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
环球时报(2022-07-13)2022-07-13 17:18:39
环球时报(2022-03-14)2022-03-14 18:19:44
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
电影(2018年8期)2018-09-21 08:00:06
通信电源技术(2016年1期)2016-04-16 04:57:29
小猕猴智力画刊(2015年4期)2015-04-28 23:55:53
机电信息(2015年3期)2015-02-27 15:54:53