基于L e a p Mo t i o n的六自由度机械臂控制系统
2017-08-30 00:17:22成都理工大学信息科学与技术学院李松林徐大杰
电子世界 2017年15期
成都理工大学信息科学与技术学院 李松林 徐大杰 张 文
基于L e a p Mo t i o n的六自由度机械臂控制系统
成都理工大学信息科学与技术学院 李松林 徐大杰 张 文
最新体感设备Leap Motion的面世提供给用户一种全新的体验,即通过跟踪探测动态手势可以进行体感游戏、虚拟演奏、凌空绘画等的非接触式人机交互。本文设计了一种新型的移动机械臂控制系统,即利用Leap Motion体感设备控制器代替传统的人机交互方式,进行人体手部动作的数据采集,将其识别的手势动作经过计算机分析处理后,控制六自由度的机械臂进行旋转、抓取等任务。文章分析了Leap Motion的原理和技术基础,然后给出了整个系统中六自由度机械臂的控制模型。实验测试结果表明系统可实时控制机械臂并较为准确地模拟人体手臂的大多数动作。
Leap Motion;多旋转自由度机械臂;人机交互控制;体感技术
0 引言
本项目研究的是通过Leap Motion来控制六自由度的机械手臂进行大多数手部动作(旋转、抓取等)。采用Leap Motion体感传感器获取人体手臂各部位空间位置坐标信息[1],根据手部姿态算法将空间转化为手部的角度参数,经过PC端串口将信息发送给单片控制机械臂完成同步动作[2],并对本文方案进行了实验测试。
1 总体结构
本文主要利用Leap Motion的手势姿态识别的便携、识别精度高等优点,通过其对手势的动作进行分析转化对机械臂进行精准控制。
本系统主要由上位机系统和下位机系统组成,系统结构框图如图1所示,Leap motion体感控制器完成对手部姿态数据的采集,对数据进行处理并识别出手势,PC机控制指令传送给Arduino开发板,而Arduino开发根据不同的指令控制机械臂各关节的旋转角度,从而完成预期的动作。

图1 系统结构框图
1.1 Leap Motion手势传感设备
Leap Motion是Leap公司生产的一种专门采集手部运动信息的传感器,内部主要由三颗红外LED和两个摄像头构成。利用视差对进入视野识别区内的目标建立三维影像模型,并实时获取手势的空间信息。基于计算机视觉的手势识别算法有基于模板匹配的算法、基于神经网络的算法和基于隐马尔可夫模型的算法等,由此得出Leap Motion检测到的手对象属性表如表1所示。

表1 手对象属性表
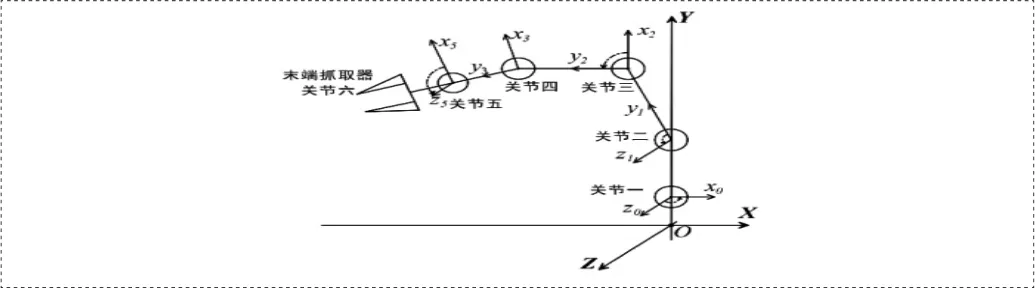
图2 六自由度机械臂D-H坐标系
1.2 六自由度机械臂
六自由度机械臂也就是多自由度机械臂,其属于典型的强耦合多输入/输出的非线性系统,本文研究采用的是市面上较为常见的机械臂,主要由大臂、小臂、舵机和机械臂爪组成。当手势信息或按键命令传给Arduino控制器后,它就先解析出动作指令再操控机械臂的舵机,让机械臂做出相应的动作。
1.3 Arduino开发板
Arduino开发板具有开源,模块化组装,简单实用等特性,本项目就是利用它的这些特性控制机械臂的舵机,从而实现机械臂的精准控制控制,大大地缩短了开发的周期。
2 系统算法及软件设计
2.1 系统控制算法
对六自由度机械臂进行了正运动学分析与求解,并提出了一套解决六自由度机械臂逆运动学问题的算法,同时使能耗达到最少。首先从机械臂的结构特点出发,建立D-H坐标系,得到正运动学模型,如图2所示。
其位姿表达式为:


其中:

上式是欠定方程组,含有无穷多组解,若采用解析几何法,最终仍需通过迭代方式进行数值计算,因此通过求极值的方法来算出机械臂在运动过程中哪种运动轨迹耗能最少;最后用求解实例的方法验证正运动学模型和逆运动学求解的正确性。此时各关节旋转角度可得:

2.2 整体软件设计
本项目在软件设计与实现中,PC端采用Windows系统、C++语言。主程序启动后,进行Leap Motion操作和按键操作的选择界面,当操作者执行一个手势后,PC端会有相应的函数对操作进行解析,再通过串口发送给Arduino开发板控制机械臂的舵机,从而控制机械臂的旋转和抓取运动。
3 实验结果
为了验证算法的实际运行效果以及与体感机械臂控制系统的耦合度,进行了实物和仿真实验,并用MATLAB进行了抓取器位置跟踪与运动的情况分析,如图3所示,基本满足系统的需要,达到控制的精准度。
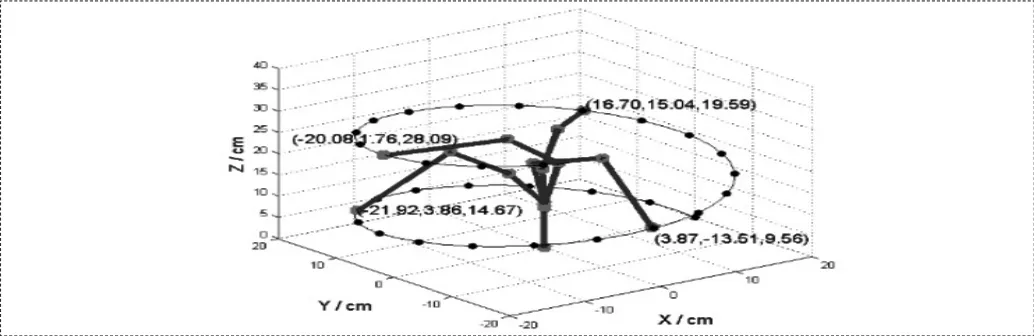
图3 抓取器位置跟踪与运动展示
4 结论
本项目设备成本低、体积小巧、操作简便、便携灵活,能适用于各种复杂环境和特殊任务,在军事侦察、可疑物品排爆、工业操作、医疗应用及日常生活等都有较好的应用前景和实用价值。
[1]田野,陈晓鹏,贾东永,等.仿人机器人轻型高刚性手臂设计及运动学分析[J].机器人,2013(5):332-335.
[2]李波,张瑾,李国栋.排爆机器人机械臂控制系统设计[J].机电工程,2015(8):1110-1114.
猜你喜欢
现代仪器与医疗(2021年4期)2021-11-05 08:25:38
电子制作(2019年13期)2020-01-14 03:15:20
自动化学报(2019年6期)2019-07-23 01:18:36
电子制作(2018年1期)2018-04-04 01:48:14
电子制作(2017年13期)2017-12-15 09:00:05
单片机与嵌入式系统应用(2017年1期)2017-04-13 20:40:48
制造业自动化(2017年2期)2017-03-20 14:26:08
电子制作(2017年22期)2017-02-02 07:10:14
工业设计(2016年6期)2016-04-17 06:42:49
舰船科学技术(2015年8期)2015-02-27 15:38:46