基于核应急机械手的主从双边控制系统研究
2017-08-30 18:28刘满禄李铭浩
自动化仪表 2017年8期
徐 亮,刘满禄,2,张 华,王 姮,张 静,2,李铭浩
(1.西南科技大学信息工程学院,四川 绵阳 621010;2.中国科学技术大学信息科学技术学院,安徽 合肥 230026)
基于核应急机械手的主从双边控制系统研究
徐 亮1,刘满禄1,2,张 华1,王 姮1,张 静1,2,李铭浩1
(1.西南科技大学信息工程学院,四川 绵阳 621010;2.中国科学技术大学信息科学技术学院,安徽 合肥 230026)
针对核应急机械手在非结构化环境作业过程中,从端机械手存在自适应能力差的问题,提出了一种可优化的自适应双边控制结构。该控制结构是以主端阻抗控制为外环,以从端模糊PD控制为内环的双闭环控制结构。采用PHANTOM设备与MATLAB搭建了双边控制系统,并在该控制系统结构下完成了联合仿真试验。根据从端机械手末端跟踪轨迹的特性,采用模糊控制器对从端控制参数进行优化处理,以提高系统自适应能力。对从端控制器参数优化前与优化后的跟踪轨迹进行试验对比。优化后的主、从端跟踪轨迹的误差明显减小。从端跟踪轨迹较优化前表现较为平滑,克服了跟踪不足问题,能够实现稳定的双边跟踪控制,从端的自适应性能也得以提升。试验结果表明,该控制系统能够实现优化跟踪,自适应性能良好,为同类型控制系统提供了理论参考。
核能; 应急处置; 机械手; PHANTOM; 双边控制; 位置跟踪; 稳定性能; 自适应
0 引言
核应急机械手是与核应急环境交互的重要设备,因此稳定的遥操作双边控制系统结构是核机器人能够有效完成作业的前提。在核应急处置过程中,操作者一旦失去从端摄像机的反馈信息,将无法感知从端机械手的信息,陷入“瘫痪”状态。这些问题都极大地限制了机械手的作业能力[1-2]。因此使从端机械手具备自适应能力是十分必要的 。
针对上述问题,杨艳华等提出了鲁棒H∞双边控制算法[3-4]。尽管鲁棒H∞控制允许模型摄动,在一定程度上能保证系统的稳定性,但复杂的数学计算使得建立精确模型较为困难,并不便于工程实现。Tacakoli等提出位置增量式双边控制方法,虽然该方法使得控制精度有所提高,但在非线性条件下并不适用[5]。胡凌燕等提出了PI控制结构,虽然便于工程实现,但自适应能力受限[6-7]。
基于此,本文提出了主端阻抗控制与从端模糊PD自适应相结合的核应急机械手双边控制系统。主端采用的阻抗控制器能较好地抑制外界干扰,提高了系统的稳定性能。从端采用模糊PD的控制方法。从端通过模糊规则,根据输入被控参数特性,能够及时调整PD控制器参数, 使系统具有自适应能力。为验证控制结构的有效性,采用PHANTOM设备与MATLAB进行联合仿真,并对控制参数进行优化。
1 双边控制系统结构
1.1 系统结构
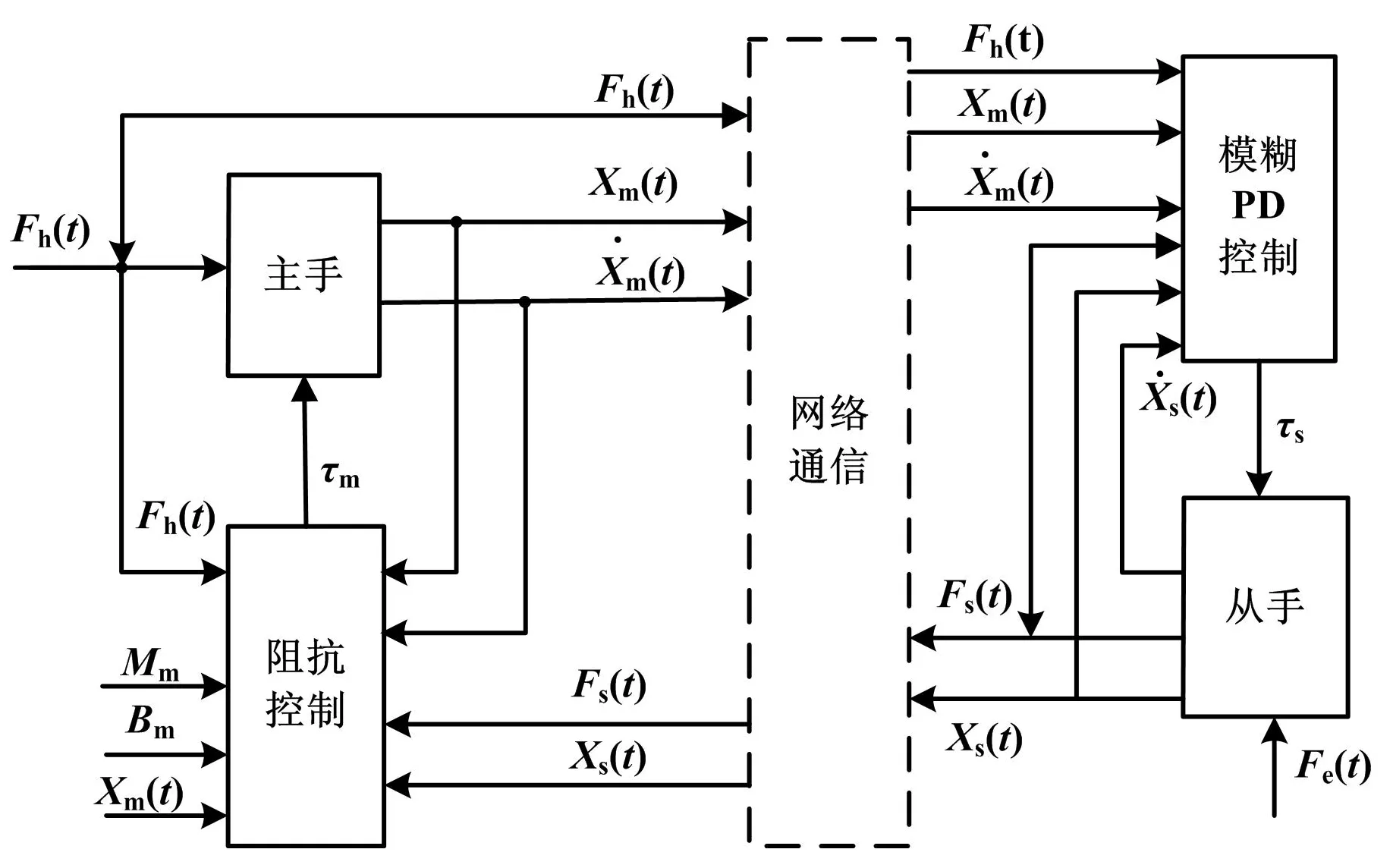
遥操作系统结构如图1所示。图1中:实线箭头表示信号走向;虚线箭头表示主、从端之间的信号经由通信端进行交互。

图1 遥操作系统结构图
主端机械手(主手)操作端位于控制室,从端机械手(从手)位于危险环境作业区。操作者在主端给出位置控制信号。从手获取信号并执行,与环境作用并产生作用力,且能够将力信息反馈至操作端。操作者感受到从手与环境作用力后,调整主手控制器位置,实现从端位置控制[8]。
1.2 主、从手与环境数学模型
主、从式机械手的数学模型[9-11]为:
(1)

(2)
式中:Mm、Ms分别为主、从等效惯性系数;Bm、Bs分别为主、从手的阻尼系数;Fh(t)、Fs(t)分别为主手和从手给定控制量;Fmd(t)、Fe(t)分别为人对主手、环境对从手的作用力;Xm(t)、Xs(t)分别为主手和从手的位移量。
根据位移关系得速度关系式:
(3)
从手是低速运动,因此环境变量可近似等效为二阶-弹簧阻尼模型[12-13]。从手与环境作用的关系为:
(4)
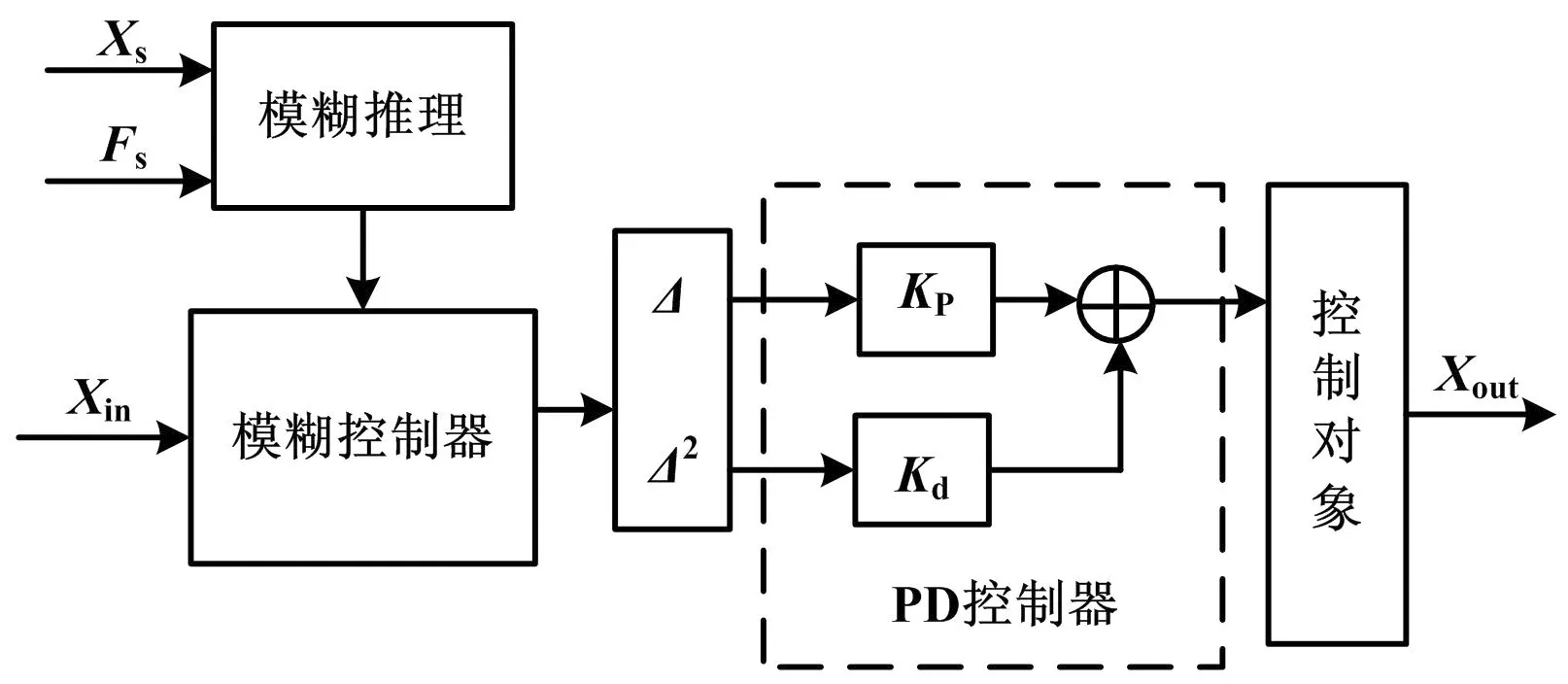
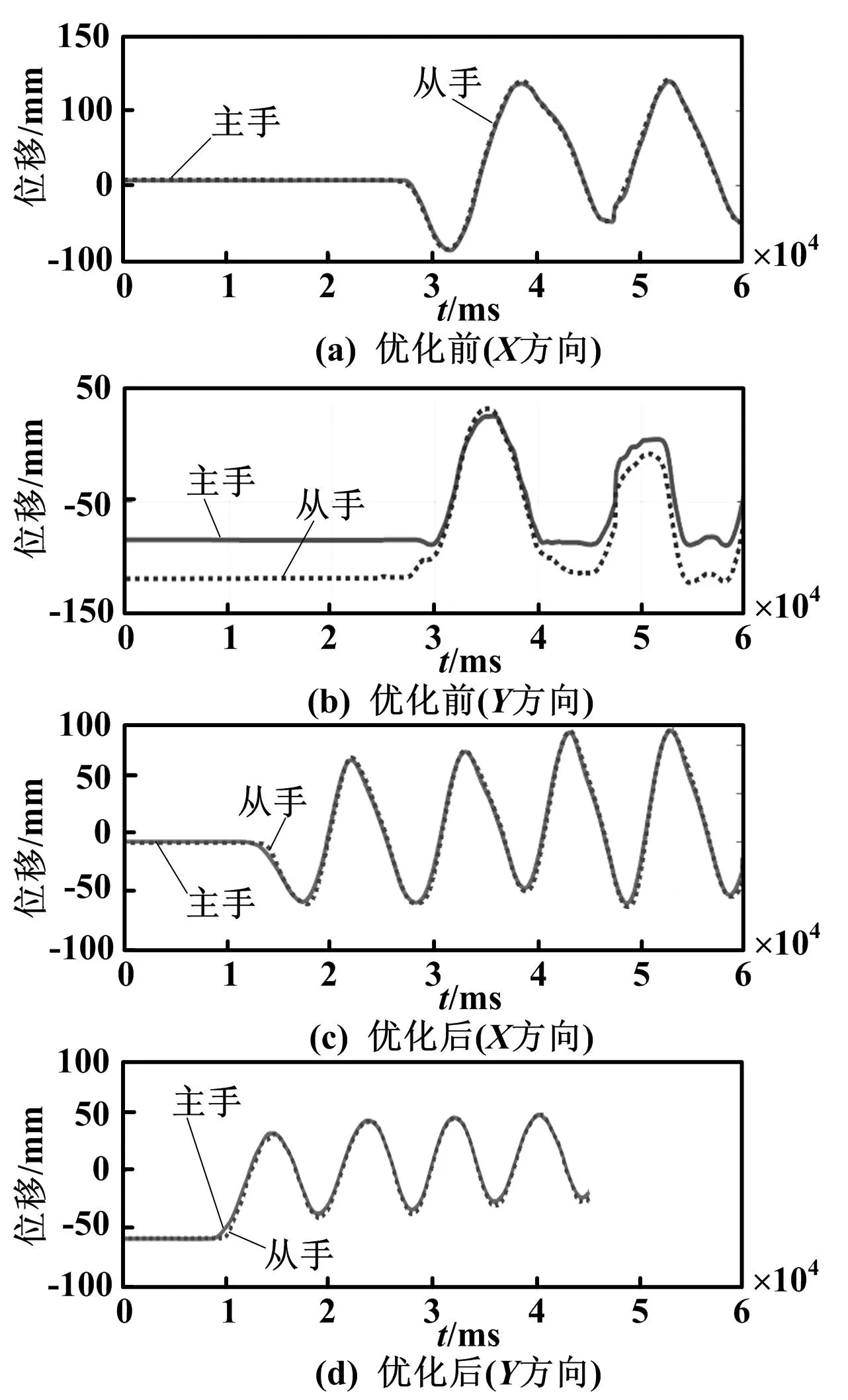
式中:Me为环境等效质量;Be为环境阻尼系数;Ke为环境刚度系数。当Xs>Xe时,从手处于与环境接触状态,从端有力产生;当Xs 2.1 主端控制器设计 主端采用阻抗控制,等效模型为: (5) 式中:Mmd、Bmd、Kmd、Tm分别为主机械手期望惯性、阻尼系数、刚度参数和控制。 联立式(1)~式(3)和式(5),可得主端控制律: (6) 当主端环境确定后,则主、从手期望惯性Mmd、阻尼系数Bmd、刚度参数Kmd均可确定。遥操作控制系统结构如图2所示。 图2 遥操作控制系统结构图 由式(1)、式(5)和式(6)可知,从端力等效为从端与环境作用位移,则主端控制的位移量作为从手与环境之间位移量的参考输入。因此,主端控制量除操作者给定控制力外,与从端期望位移量、期望位移变化率以及从端力有关,即系统外环的反馈量为从手位移量及其位移变化率。 2.2 从端控制器设计 从手与环境作用为主动态,控制模型为: (7) 式中:Msd、Bsd、Ksd、Ts分别为从手期望惯性、阻尼系数、刚度参数和控制量。 联立式(2)和式(7),可得从端控制律: (8) 为保证从手能够很好地适应从端环境,对从端位移量以及从端与环境作用力进行采样,在t时刻,有: ΔXs(t)=Xs(t)-Xs(t-1) (9) ΔFs(t)=Fs(t)-Fs(t-1) (10) 模糊PD控制器结构如图3所示。 图3 模糊PD控制器结构图 图3中:Δ为模糊控制器输出的误差;Δ2为模糊控制器输出误差的变化率。设ΔXs、ΔFs为模糊PD控制器的推理输入,则ΔMs、ΔBs、ΔKs为模糊PD 控制器的调节对象,Ts为模糊PD控制器的控制量。采用重心法解模糊化,模糊规则设计如下。 ①当ΔFs较大、ΔXs较小时,从手接触环境刚性较大,需对Ks、Bs进行增大调节。 ②当ΔFs为零时,ΔXs无论大小,从手未与环境接触,无需调节Ks、Bs。 ③当ΔFs较小,ΔXs较大时,从手与环境接触刚性较小,对Ks、Bs进行减小调节。 根据以上规则,将从端控制量统一后,划分为7个模糊子集NB、NM、NS、ZO、PS、PM、PB,隶属度函数均为三角型函数。 模糊PD控制器中的PD参数满足: Kp=Kp0+ΔKp (11) Kd=Kd0+ΔKd (12) 式(11)和式(12)的PD初始参数Kp0、Kd0由Z-N法得到,经调节确定初始值。Kp、Kd参数经模糊推理确定。从手采用模糊PD控制器,可根据接触环境不同而进行相应调整,提高了系统的自适应能力。 二端口网络以h参数组成的混合矩阵为基础[14-15]。该网络输入与输出矩阵关系为: (13) 莱威林(Liewellyn)准则提供的稳定判据是绝对的稳定性充要条件,二端口稳定需要满足以下条件。 ①h11、h22在复平面内的右半面无极点。 ②h11、h22在复平面虚轴上存在留数矩阵是非负定的单极点。 ③这些极点处计算所得实部不小于零。令s=jω,对于所有实数ω二端口的参数都满足: (14) 2Re[h11(jω)]Re[h22(jω)]-{Re[h12(jω)]+Re[h21(jω)]}2-{Im[h12(jω)]-Im[h21(jω)]}2≥0 (15) 根据式(1)、式(2)和式(13)得: (16) 由莱威林准则式(14)和式(15)得: (17) (18) 将参数代入莱威林准则式(16),得: (19) 由式(19)推导出: (20) 由KmKs>0,得系统稳定条件为: [1-cos(-2Tω)]≥0 (21) 若式(21)成立,则式(19)成立。由此可知该系统满足绝对稳定准则条件,因此该系统是稳定的。 本试验平台使用的是 SensAble 科技公司的 PHANTOM 触觉交互设备。试验平台中,每个力反馈设备具有6自由度,使用具有力觉反馈的末端点作为控制对象。试验中操作者操作主手对从手进行控制,依据主、从跟踪轨迹情况分析该控制系统结构的稳定性与自适应能力。 经试验,主、从手末端点跟随轨迹如图4所示。图4(a)和图4(b)是未经模糊PD控制器优化的X、Y方向主、从跟踪轨迹结果,而图4(c)和图4(d)是已经从端模糊PD控制器优化后的X、Y方向主、从跟踪轨迹结果。 图4 末端点跟踪轨迹示意图 主、从机械手末端点X、Y方向轨迹跟踪最大误差如表1所示。 表1 轨迹跟踪最大误差 由图4(a)和图4(b)可以看出,未经优化的主手给定轨迹并不平滑,而优化后的图4(c)和图4(d)(即X方向和Y方向)上,主手给定跟踪轨迹表现较为平滑,没有较大的操作抖动干扰,表明以模糊PD控制为内环、阻抗控制为外环的双闭环控制结构,对操作者生理颤抖有一定的抑制功能。其次,由图4(a)和图4(c)的对比、图4(b)和图4(d)的对比以及表1的结果可以看出,优化后X方向和Y方向跟踪误差均减小。在优化后的双边控制过程中,从端没有再出现跟踪不足以及跟踪震荡现象,从端模糊PD控制器克服了跟踪不足的问题,实现了较为平稳的跟踪,主、从端之间跟踪轨迹较为平滑,保证了主、从手在跟踪运动过程中的速度连续性,证明了系统结构稳定、跟踪性能良好。经优化后,在第10 s时,主端的机械手轨迹由直线变为曲线,从端仍能够实现较好的跟踪,表明系统结构具有一定的自适应能力。 此外,由于桌面存在摩擦,机械手的关节电机控制精度以及关节的机械摩擦等外界因素也给本试验系统带来了一定的误差。尽管系统存在上述非线性干扰误差,但从手仍实现了较好的跟踪控制,表明设计的系统方案是有效的。 本文重点研究了核应急环境机械手遥操作双边控制系统。针对遥操作系统中的从手自适应能力不足的问题,设计了一种具有自适应的双闭环式的双边控制系统,并给出了双边控制器的设计方法。对系统整体的稳定性能进行了论证,并在力反馈设备和MATLAB所搭建的系统平台上进行了双边控制系统试验。 试验证明,所设计的双边控制系统能够有效实现双边优化跟踪控制,整体性能稳定,尤其经过模糊PD优化后,主、从跟踪轨迹误差明显减小。主、从端之间无论采用直线段跟踪还是曲线段跟踪,经优化后的从端跟踪效果都得到了改善,系统自适应能力有所提高。因此,所设计方案是有效可行的。此外,该系统结构简单,有利于工程实现。下一步的研究工作为优化主端控制器参数,进一步提高整体系统的自适应能力。 [1] 邓启文.空间机器人遥操作双边控制技术研究[D].长沙:国防科学技术大学,2006. [2] 宋爱国.力觉临场感遥操作机器人:技术发展与现状[J].南京信息工程大学学报(自然科学版),2013,5(1):1-19. [3] 杨艳华.基于线性矩阵不等式空间遥操作系统的鲁棒控制.机械工程学报[J].2013,49(11):3-7. [4] 郭语,孙志峻.基于扰动观测器的时延双边遥操作系统鲁棒阻抗控制[J].机械工程学报,2012,48(21):15-21. [5] MOHAMMADI A,TAVAKOLI M,JAZAYERI A.PHANTSIM:A simulink toolkit for the sensable PHANToM haptic devices[C]//Canada:Proceedings of the 23rd CANCAM,2011. [6] 胡凌燕,刘国平.PI控制的有时延遥操作系统仿真平台的建立[J].南昌大学学报(理科版),2011,2(1):28-34. [7] WILDE M,CHUA Z K,FLEISCHNER A.Effects of multivantage point systems on the teleoperation of spacecraft docking[J].IEEE Transactions on Human-Machine Systems,2014,44(2):200-210. [8] NISKY H M H,OKAM A M.Uncon trolled mani fold analysis of arm joint angle variability during robotic tele-operation and freehand movement of surgeons and novices[J].IEEE Transactions on Biomedical Engineering,2014,61(12):2869-2881. [9] 张文安,金俊凯,俞立,等.基于广义扩张状态观测器的遥操作系统同步控制[J].控制与决策,2016,31(11):77-82. [10]邱恒,刘满禄,张华.基于模糊PD算法的三自由度机械手遥操作双边控制[J].自动化与仪表,2016,31(9):11-16. [11]刘卫东,张建军,高立娥.水下机械手主从遥操作双边控制策略[J].西北工业大学学报,2016,34(1):53-58. [12]金俊凯,俞立,张文安.机械手遥操作系统的时延补偿自抗扰控制[J].江南大学学报(自然科学版),2015,14(6):723-729. [13]ZHENG M,CHEN Q H,XIAO W,et al.Bilateral teleoperation with reducing wave-based reflections [J].Advances in Manufacturing 2013,11(23):288-292. [14]刘威,宋爱国.基于虚拟现实的力觉临场感系统及其稳定性分析[J].仪器仪表学报,2006,27(S2):1090-1093. [15]田小锋,黄惟一,宋爱国,等.力觉临场感遥操作机器人系统的时延稳定性分析[J].制造业自动化,2001,23(8):15-17. Research on the Master-Slave Bilateral Control System Based on Nuclear Emergency Manipulator XU Liang1,LIU Manlu1,2,ZHANG Hua1,WANG Heng1,ZHANG Jing1,2,LI Minghao1 (1.School of Information Engineering,Southwest University of Science and Technology,Mianyang 621010,China;2.School of Information Science and Technology,University of Science and Technology of China,Hefei 230026,China) In non-structural environment operational process,the adaptive capability of the nuclear emergency manipulator is poor;aiming at this problem,an adaptive bilateral control structure which can be optimized is put forward.It is a double closed-loop control structure,with master end impedance control as the outer loop and slave end fuzzy PD control as the inner loop.The bilateral system is built with PHANTOM equipment and MATLAB,and the joint simulation experiment is completed in this control structure.According to the characteristics of the tracking trajectory in the slave end,the control parameters of slave end are optimized by fuzzy controller to improve the adaptive capacity of system.The tracking trajectory before and after the parameters of slave end controller being optimized is experimentally compared.After optimization,the tracking trajectory error between master and slave is reduced.The track trajectory is smoother than that of before optimization and insufficient tracking is overcome,so stable bilateral tracking control can be achieved,the adaptive performance of slave end is improved.The results show that the control system can achieve optimal tracking and has good adaptive performance,which provides theoretical support for the same type of control systems. Nuclear energy; Emergency response; Manipulator; PHANTOM; Bilateral control; Position tracking; Stability; Adaptive 国家“十三五”核能开发科研基金资助项目(20161295)、西南科技大学研究生创新基金资助项目(17gcx121) 徐亮(1990—),男,在读硕士研究生,主要从事机器人遥操作技术的研究。E-mail:13778018371@163.com。 张华(通信作者),男,博士,教授,博士生导师,主要从事机器人智能控制、特种机器人应用技术的研究。E-mail:280384649@qq.com。 TH-39;TP89 A 10.16086/j.cnki.issn1000-0380.201708001 修改稿收到日期:2017-03-272 控制器设计




3 系统稳定性分析


4 仿真验证及结果分析

5 结束语
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21
哈尔滨轴承(2020年3期)2021-01-26
文化创新比较研究(2020年8期)2021-01-22
文化创新比较研究(2020年13期)2021-01-14
装备制造技术(2020年4期)2020-12-25
经济数学(2020年1期)2020-06-24
电子制作(2019年13期)2020-01-14
中国材料进展(2019年10期)2019-12-07
制造技术与机床(2019年8期)2019-09-03
智富时代(2017年4期)2017-04-27