THMR-V平台上的智能交通监控系统设计与实现
2017-08-30 00:01王亚飞
计算机测量与控制 2017年7期
王亚飞
(平顶山学院 信息工程学院,河南 平顶山 467000)
THMR-V平台上的智能交通监控系统设计与实现
王亚飞
(平顶山学院 信息工程学院,河南 平顶山 467000)
随着我国经济水平增长,汽车的占有率不断增高,尤其是家用汽车已经成为当今最为普遍的交通工具;为此,提高我国交通管制手段,提高管理监控能力是当前我国交通事业发展中非常重要的一部分;设计出一种智能交通系统,依靠THMR-V室外移动机器人及视觉临场遥感系统,配合计算机智能分析技术以及信息处理和传递技术为基础,对当前的交通环境实现智能监控和管理;对该系统进行实际应用测试,并且做出分析与结果;研究表明,此系统在设计方面大大的改善了原有系统中不成熟的部分,具有很高的智能化、实时化、自动化特点,提高了当前我国交通监控当中的效率和准确性,加强了在实际应用中的可行性,督促驾驶人员遵守交通法规,推动我国交通事业朝智能化以及自动化方向发展。
THMR-V;交通监控系统;智能
0 引言
随着目前我国经济持续增长,人民生活水平提高,使得汽车逐渐成为家用必需品。随着我国人均拥有汽车和各行业企业当中公用汽车数量的增多,对当前我国交通事业管制方面产生了巨大的压力。汽车数量的增加无形中导致道路中交通事故以及违法违规现象的增多,对于如何及时发现交通事故和违反交通法的现象以及提供较为清楚的责任划分依据,同时对道路汽车的监控管理提出了很高的要求。而原有的监控系统已经不能满足日益增长的信息数据监控需求,亟需设计出一种可以对现在交通环境实现智能化能自动化以及更加全面的监控方式。
随着当今计算机网路技术的发展,通过此类技术已经可以实现对于信息的收集、处理、传递自动化和智能化。为此,依靠计算机网络技术的应用,结合当前的交通管理设计出一种智能交通监控系统,保证对于我国越来越复杂的交通环境都可以做到完善的监控管理工作。而在以往的管理系统和方法中普遍存在着自动化较弱以及实时性不够强等缺点,并且对于信息的收集和处理效果不佳。通过对于当前交通管理和监控方面的要求以及自动化和智能化发展的需要,设计出一款利用THMR-V平台的交通监控系统。THMR-V平台是由清华大学智能技术与系统国家重点实验室智能移动机器人课题组独立开发的多功能室外移动机器人实验平台[1]。本文通过对于当前我国交通监控管理需求的研究,根据THMR-V平台的基本特性设计出一款监控系统,实现交通监控智能化发展。
通过对某实际路段的监控进行实际监测,并且与以往的监控系统的监控效果进行比对,分析出其具备的优势和发展的前景。提出此系统开发的可行性以及必要性,旨在推动当前我国交通事业的智能化以及自动化方向发展。
1 智能交通监控系统设计的意义
1.1 系统设计的意义
智能交通监控系统是一种利用计算机技术对行驶车辆进行信息采集、处理、储存的系统。该系统可以对行驶中的违章车辆进行更有效的监控和管理,并且隐形含义下可以减少许多对于违章报有侥幸心里的司机给予警告[2]。其在当前的交通管理过程中有效的保证了事故的发生率并且提高了道路的运行程度,是当今社会交通安全中一个必不可少的关键部分。而对于当前的智能交通监控系统的开发与研究我国一直处于一个相对落后的环境中,而引进先进系统又面临着高昂的费用,并且外国的系统设计对于中国的交通环境出现了“水土不服”的尴尬现状。为此,我国独立设计出一款智能交通监控系统,满足当前我国逐渐增大的交通管控压力是非常有意义的。
其系统从功能上来说,可以对车辆进行检测、跟踪以及定位的作用,加之应用了计算机网络技术实现了信息的实时查询以及跟踪更新等自动化、智能化的功能。可以较为完善的对于当前我国交通环境进行可靠的管理和监控作用。
1.2 系统的关键部分
在目前的智能交通监控系统当中,由于应用了计算机网络技术进行信息的自动捕捉和传递储存的作用。为此智能交通监控系统最为核心的部分就是核心数据库的设计方向。因为当前我国交通环境的复杂化程度越来越严重,所收集到的信息种类和差异性也越来越多,如何将所收集来的信息进行合理的处理和传递都要依靠核心数据库。
其次则是此系统与交通部门及相关部门的其他系统兼容性和协作性的要求。作为智能交通监控系统是当前交通事业管理体系中一个重要的系统分支,而为保证整个交通事业的稳定发展和监控管理的科学性提高,对于其与各个系统间的协同合作有着很高的要求。
最后则是对于信息的传递和查询功能。在交通监控系统当中因为信息时代的到来,保证其运行的重要部分则是信息,其中包括对于事故现场信息、车辆违章拍照信息、车辆跟踪信息等多方面信息综合。为使得这些信息对于交通案件处理中可以有很大的帮助,则要强调对于系统中储存的信息进行有效的查询以及传递功能的设计[3]。
2 系统的结构设计
2.1 THMR-V平台结构
此系统的设计依靠THMR-V平台来进行,而此平台配备了光码盘、电磁罗盘以及DGPS定位方式。而这种定位方式可以大大的加强定位的精准度,以至于达到1米的范围内。而且此平台最为基础的设备则是远程遥感机器人,利用此机器人可以实现远程对于违章车辆的监控管理工作。这种机器人配备了无线数据通讯以及临场感遥控驾驶系统,可以对于现场的数据信息进行及时的传递和面对复杂交通环境中达到跟踪监控的功能。其体系当中允许不同子系统进行组合以及车体控制系统接收命令,使得THMR-V可以随着环境的改变更换自身的软硬件设备以达到各种交通监控任务。在当前交通监控管理当中最为重要的就是对于现场信息的收集和传递功能。在远程遥控机器人身上配备了摄像头,可以对于实时情况进行录像和拍照功能,并且可以将收集到的影响资料进行处理并传递到总控制中心,而且它还可以做到图像同步传输的功能,将实时性的要求做到更加完善。
2.2 基于平台设计的智能交通监系统结构
2.2.1 主要技术
在总体智能交通监控系统设计当中最为基础和重要3个技术为车牌识别技术、图像信息储存处理技术和信息储存传递技术。
在交通监控管理当中最为直接和有效的监控方式就是对于行驶中的车辆车牌进行识别和监控功能。为此在整体构架当中对于系统对于车牌识别的能力程度是当前交通监控管理当中一个非常重要的技术部分。现如今,一般采用的计算机视觉技术,其可以做到更高的精准度的识别车牌信息。在当前较为复杂的交通环境当中,对于违章和事故车牌进行精准的识别功能,并且将信息传递到中央控制当中,根据数据库当中所储存的车牌信息进行比对,可以及时发现交通违章车辆的基本信息,做到对于交通监控的合理管理。其次则是图像处理技术,因为在当前的车辆行驶当中,THMR-V机器人对于现场所拍的图像或是车牌在大多数情况下很难进行辨认,为此,需要利用OpenCV计算机视觉函数库的能力进行图像处理和分析工作。其不仅可以对收集来的图像录像文件进行特征提取和分类工作,其中是利用矩阵操作和线性代数运算等等来实现基本的图像分类操作。并且加上数字化图像处理方法,其中有图像采样与插值。图像色彩模式变化等图像处理的方法对无法辨认的图像进行处理,好能对现场的信息进行有效的辨认和分析[4]。其次,应用OpenCV计算机视觉库可以做到录像设备自动跟踪和定位功能,并且进行矩阵计算和参数坐标计算等操作,使得所监控的车辆可以被系统实时监控,以达到最佳的效果。
最后则是信息的储存和传递技术。因为此系统所采用的THMR-V机器人远程遥感监控,为达到较高的跟踪和监控需求需要总控制中心对机器人进行远程遥感工作。而为保证这一项要求的达成,需要在远程机器人中配备信息传递和接收功能。目前最为常用的传递方式则是利用互联网实现无线传输操作,控制中心通过内部无线网络将指令传递到机器人中,机器人通过接收装置对得到的指令进行解析和储存,并且执行指令以达到对于现场的实时监控作用。而远端的机器人可以将收集到的信息通过预处理之后传递回控制中心,控制中心通过与互联网数据库以及内网数据库的信息进行比对,得到当前监控任务目标的位置以及详细信息。
而整个系统智能化的体现则是在其设定了较为详细的智能法规等相关信息的储存,其自身配备了一个较为完整的数据库,远端的设备可以将道路中发生的一切事件进行数字化模拟,并传送到数据库当中与其中所储存的资料和信息进行比对,自动分辨此事件的类型。通过对于这种类型的分别做出是否属于违章现象。如果此事件属于违章现象,系统将自动对违章车辆的基本信息登录到交通部门的管理中心当中,对于通常的交通违规现象可以做到自动化管理方法,减少人员操作的工作量。最为常见的就是道路中配备的电子眼,其24小时对所监控的路段进行拍照和录像,当出现闯红灯或是不按照当前路段规定行使的行为时,电子眼会在众多的图像中筛选出违章车辆的图像信息并将其传递到监控中心当中,以供其对违章车辆进行处罚决定。而且为保证数据库当中的空间,系统还进行智能删除无违章现象的图像信息。
2.2.2 系统的组成结构和流程
图1与图2为该系统的功能结构以及流程结构图。

图1 系统的功能结构图
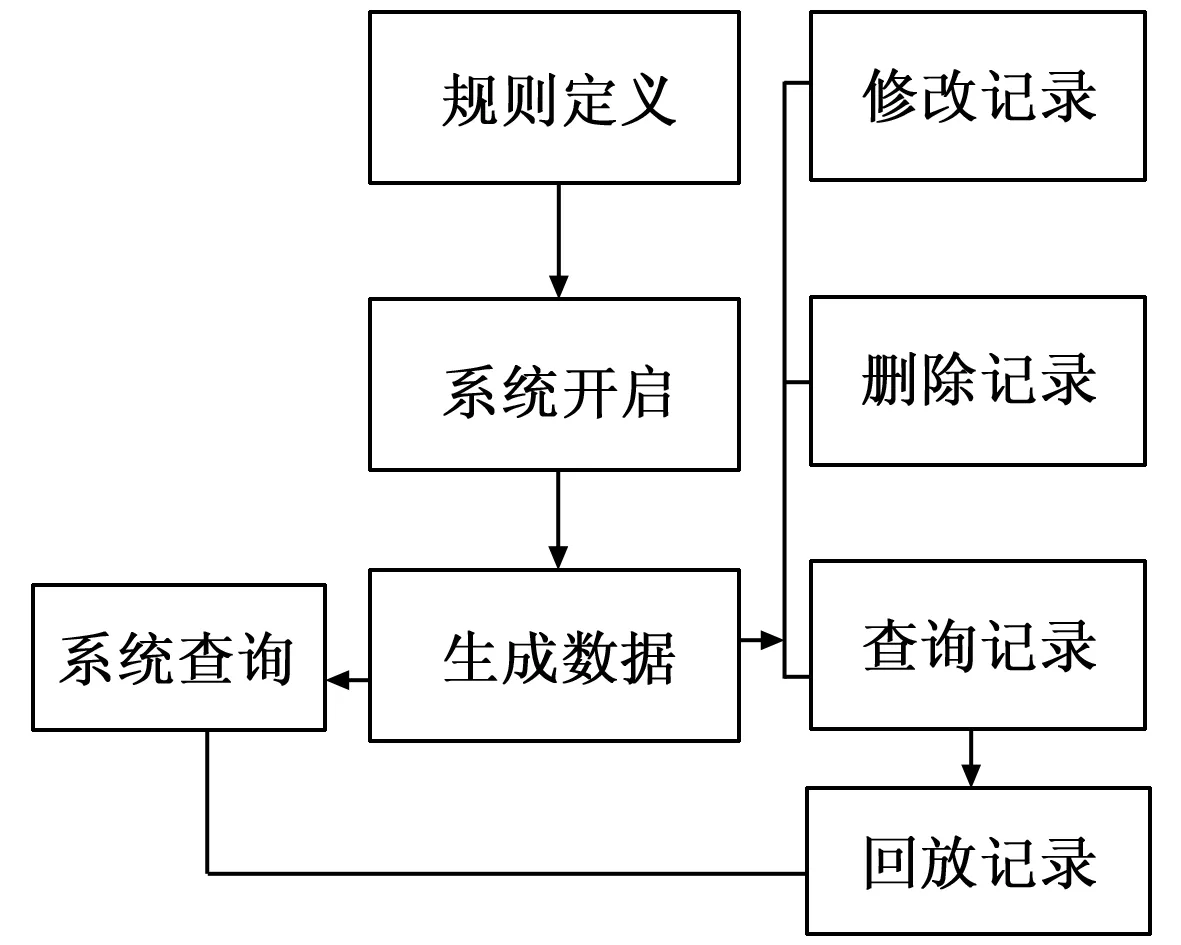
图2 系统的工作流程图
而该系统所采用的是多线程控制结构,便于定期的维修与更新。主要分为4个线程分别为主程序界面、传感器信息收集和传递、智能控制线程、模拟控制线程。而且为了保证信息传递通道的稳定性加配了一个网络状态监控模块。其中在主程序界面里有信息显示以及故障调试窗口以及相应监控路段的地理位置显示。传感器信息收集和传递线程中主要是对下位机传递过来的信息进行处理和解析。在长时间没有接收到信息时则被归为网络故障并反映到控制中心。该部分采用802.3的以太网帧,接受协议选择UDP协议。系统需要建立一个Raw Socket对命令进行拦截和显示。模拟控制线程则是在需要进行调试和维护的过程中进入到离线自动模拟运行当中,在遇到无法连接或是系统维护的时候不干扰正常的工作。
程序在使用的过程中有离线状态(Manual)、智能控制状态(Autonomous)、远程控制状态(Renmote)以及正常使用的在线状态(Manual-Online)。在出现断网的情况是系统自动进入到自控模式当中,模拟设定好的规则进行离线操作。而在正常的使用情况时,传感器获得连接状态,可以根据下位机传递回来的信息对当前路段信息的状态进行分析。而处于远程模式时传感器将获得融合线程的网络监听,并将远程控制机所传递回来的数据和信息提供给操作人员[5]。
该系统在功能结构组成上应对交通监控管理当中的主要要求分为交通规则设置、交通信息处理、交通信息处理以及交通信息回访。在交通规则设置中主要是有交通规则定义以及新规定的增加以及原有规定的修改和删除。因为所监控的路段会因为不同的现实情况而需要不同的规则设定。在交通信息处理模块当中主要是对于其现场的交通信息进行收录以及储存发送等。其作为智能交通监控活动当中处理模块和信息管理部分进行对接的重要部分。交通信息管理模块则是对于交通方面的各种信息查询和统计,并且实时修改和删除的部分。交通信息回放功能模块则是交通信息查询之后对出现的异议或是对车辆违章现象的现场查询功能部分。
3 基于THMR-V监控系统与原系统对比分析
在进行了基于原有的监控系统与当前采用的THMR-V平台设计的智能监控系统进行对比。首先在操作窗口页面上,其增加了多个输出窗口以及日志时间戳。这个增加对系统可以实现多方向多设备远程监控坐下了基础。并且在外部监控设备在长时间工作或是遇到环境因素导致系统过热的情况是会自动通过输出窗口将设备的异常信息传导到管理人员监视界面,给维修和保养以及设备的稳定使用打下了基础。在这一点上,该系统设备与原有的监控系统来说对于故障的检测以及维护有这个针对性。而日志时间戳可以改善由于外部环境变化导致的系统参数自动更改的参数统计。利用日志时间戳可以对每一次的控制循环实际操作所产生的数据和输出的结果进行定量分析。通过收集来的更改数据与原有的数据进行对比,找出随着系统自动改后产生的不稳定以及数据差错的问题所在。
在新系统应用中,由于以上的功能设置也加强了其实时性,这相较与以往的系统有着很大的提高。而且其稳定性的保证通过对于日志记录的数据进行分析得出其在于缩短了器械反应中可能产生的延迟现象,大大的增加了信息接收和传出的速度以保证实时性和稳定性。并且新系统当中所采用的网络通信方面,主要是由有线网络传输,可以避免许多因为信号不稳定以及现场环境影响因素过多导致的信息传递不完全和无法传输的情况[6-7]。为此,系统在设计方面中大大的改善了原有系统中不成熟的部分,加强了在实际应用当中的可行性。
4 实际路段系统使用情况监测
根据以上所分析设计的在THMR-V平台下建立的一个较为完善的智能交通监控系统,为监测系统的运行情况和对于实际操作中是否有效和准确性进行某路段中的所出现的违章车辆监控分析,并对其监控结果的有效性进行分析。其中所应用平台下的远程遥感机器人即为监控路段的电子眼设备。
首先将电子眼所监控的路段通过文件编辑形成Sln文件,并且在系统中打开调试结果如图3。以及对该路段进行交通规则设定。其中对于设定路段图像中画框区域设定为相应的规则,而箭头方向则是该道路中车辆行驶的正常方向,将这种方向规则定义为禁止逆行模式。规则交互设置对话框的为图4。

图3 系统的主操作页面
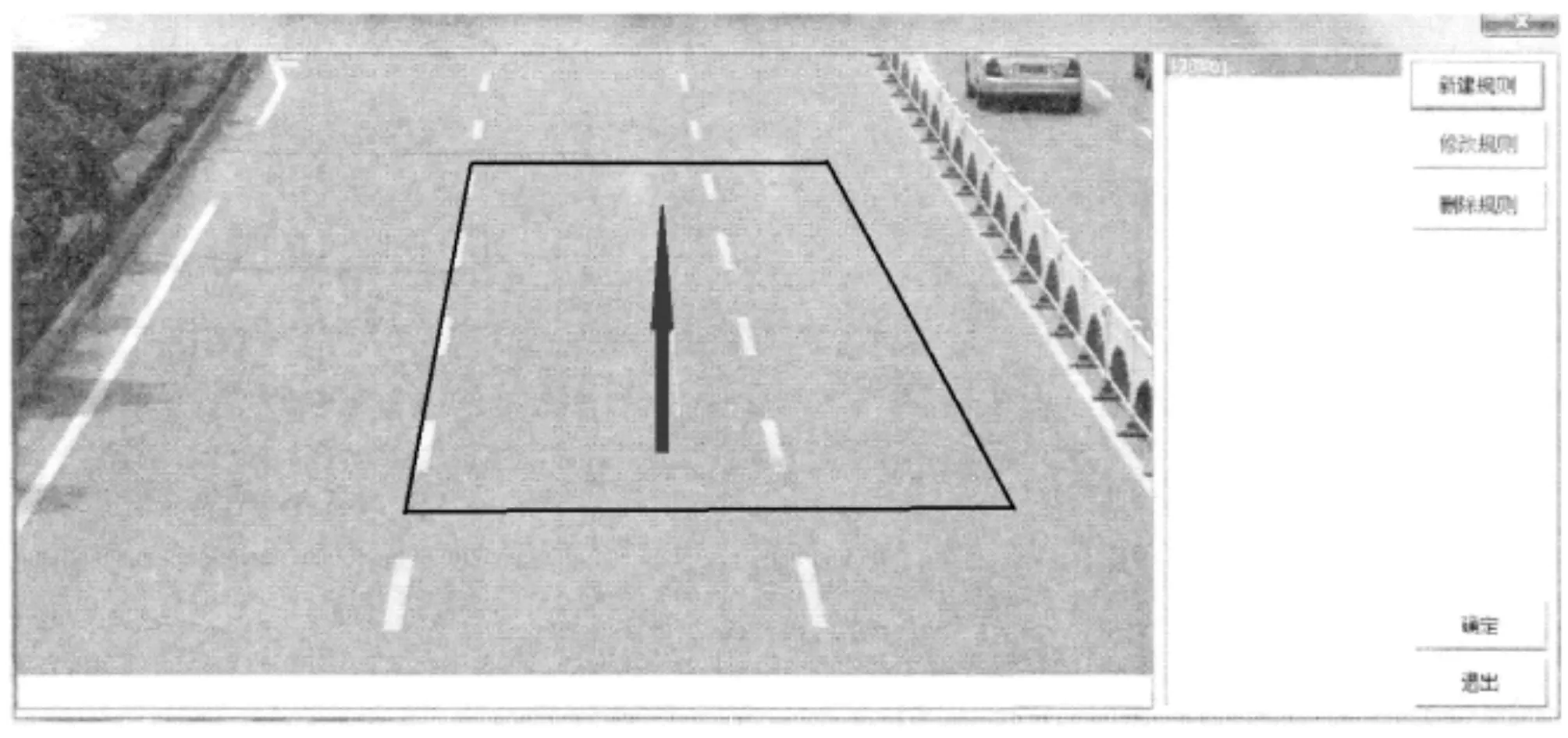
图4 规则交互设置对话框
以上为测试前路段规则设定的准备阶段。此规则和信息都传递到系统的数据库当中,接下来,将出现此路段的违章现象的发生并且考察此系统对于出现违章现象时能否做到智能判定,将信息传递和储存在总体数据库当中。在检测当中出现某车辆此道路逆行状态,进行违章信息查询时进入到信息查询页面输入所查询的违章车辆车牌号。
为观察系统对于违章车辆的检测效果是否准确,以及对于当前违章图像的处理分析合理性,本文观察了对于检测中处于违章状态的车辆现场图像回放。如下图5所示。
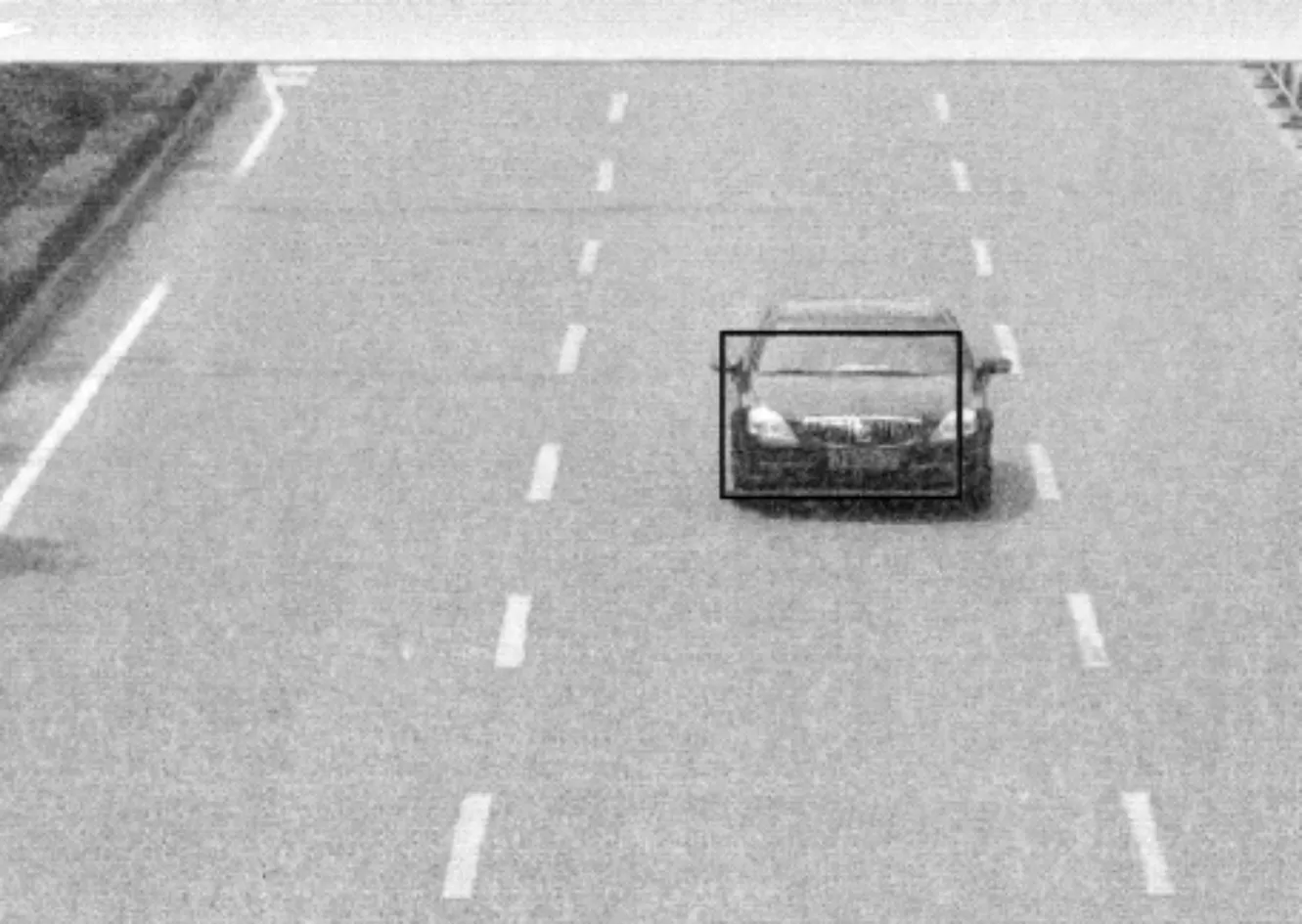
图5 违章现场回放
在图像中可以看出首先此违章车辆确实存在违章现象,为此可以保证此监控系统对于违章现场的辨识程度极高,可以准确的判断出行驶中的车辆是否属于违章现象。其次,该系统会自动标示出违章车辆,由于当前检测当中现场并没有其他车辆行驶的情况,但是系统都会对违章车辆进行自动画框提示,标示出违章车辆,供交通管理部门进行处理。最后图像清晰度较为完整,周遭的基本情况基本显示清楚,具备很好的违章辨识度。
5 结论
本文通过对当前的交通环境进行分析,提出设计一种智能交通监控系统的必要性,并根据THMR-V平台,设计出一款以信息传递和自动辨识功能为主体,实现自动化监控和智能化信息处理的智能交通监控系统。通过对于此系统的基本结构和设计方向的研究提出此系统的总体设计理念。并且通过实践检测,得出基本路段上可以做到很完善的车辆行驶状况监控。此系统做到了很高的智能化、实时化、自动化的特点,提高了当前我国交通监控当中的效率和准确性,并且督促驾驶人员遵守交通法规。
[1] 张鹏飞,何克忠,欧阳正柱,等.多功能室外智能移动机器人平台—THMR-V [J].机器人, 2002,24(2):15-19.
[2] 郑永康,胡 斌,丁冬花. THMR-V平台上基于LINUX的监控系统设计与实现[J].计算机应用, 2004,24(8):158-160.
[3] 李 超,智能交通监控系统信息管理平台的设计与实现[D].济南:山东大学, 2013.
[4] 李 华,丁冬花,何克忠.THMR-V导航控制算法研究[J].机器人, 2001,23(6):145-152.
[5] 王晓东,施海燕.城市道路交通信息监测系统[J]. ITS通讯, 2002, 3(1):2562-2652.
[6] 秦 波, 刘 颖, 亢红波. 城市道路交通智能照明系统设计[J]. 计算机测量与控制, 2016, 24(10):256-263.
[7] 张 维. 基于单片机的可编程智能交通灯控制系统[J]. 电子设计工程, 2016, 24(4):171-174.
Design and Implementation of Intelligent Traffic Monitoring System Based on THMR-V Platform
Wang Yafei
(Information Engineering College, Pingdingshan University, Pingdingshan 467000, China)
With the development of our country's economy, the increasing of the share of the car, especially the domestic car has become the most popular means of transportation. To improve the means of traffic control in our country, and to improve the ability of management and supervision is a very important part of the development of China's transportation industry. Design a kind of intelligent traffic system, rely on the THMR-V outdoor mobile robot and visual telepresence remote sensing system, with intelligent analysis technology and computer information processing and transmission technology, the realization of intelligent monitoring and management of the current traffic environment. According to the deficiencies of the previous monitoring system, the improvement scheme is designed, and the system is tested, and the results are analyzed. Studies have shown that this system greatly improve the immature part of the original system in design aspect, having the characteristics of high intelligent, real-time and automation, to improve the efficiency and accuracy of our country traffic monitoring, to strengthen the feasibility in the practical application, supervise the drivers obey the traffic rules, to promote our country’s transportation enterprise development in the direction of the intelligent and automation direction.
THMR-V; traffic monitoring and control system; intelligence
2016-12-26;
2017-02-06。
王亚飞(1981-),女,河南平顶山人,硕士研究生,讲师,主要从事计算机应用、网络安全方向的研究。
1671-4598(2017)07-0106-04
10.16526/j.cnki.11-4762/tp.2017.07.027
TP242
A
猜你喜欢
江苏安全生产(2022年4期)2022-05-23
疯狂英语·新读写(2021年10期)2021-12-07
作文·初中版(2021年12期)2021-09-15
童话世界(2020年32期)2020-12-25
汽车与驾驶维修(汽车版)(2020年6期)2020-07-24
新世纪智能(英语备考)(2019年4期)2019-06-26
铁道通信信号(2019年11期)2019-05-21
小学生导刊(2018年16期)2018-07-02
大社会(2016年3期)2016-05-04
中国当代医药(2015年17期)2015-03-01