
人机协调运动控制方法研究现状与关键技术分析
2017-08-29 14:32:43岳海波
河南科技 2017年13期
岳海波
(郑州机电工程研究所,河南 郑州 450015)
人机协调运动控制方法研究现状与关键技术分析
岳海波
(郑州机电工程研究所,河南 郑州 450015)
人机协调运动控制方式是指实现与人动作相协调的机器人动作控制方式。在日常生活中,人与人合作搬运是比较常见的,但是人的机械强度有限,无法完成超过极限的负载搬运。因此,为了充分发挥人与机器人的优势,提出人机合作助力方式,延伸到外骨骼系统,它们有一个共同的特点就是人与机器人在运动过程中一直处于接触状态。人机协调运动控制方法主要包括负荷分配控制、阻抗控制、直接力控制、智能控制等。
机器人;人机协调;运动控制
随着机器人技术的创新与发展,机器人的工作模式由单独完成简单任务逐渐转变为人机协作完成复杂任务。在人口老龄化和劳动力缺乏的背景下,机器人扮演的角色越来越重要,某些特种工作环境需要机器人参与完成,而在一些需要保持人类主观性的工作条件下,人机协作系统则能发挥重要的作用。
在人机协作过程中,需要机器人能够自然友好地与人交互,人机协调运动控制的研究具有重要的理论意义及实际应用价值。为了提高人机协作系统的稳定性与安全性、减轻操作者劳动强度、增强操作舒适性,研究人员提出了多种人机协调运动控制方法。本文首先分析人机协调运动控制的方法,然后分析人机协调运动控制的关键技术。
1 人机协调运动控制方法
1.1 负荷分配控制
人与机器人协调搬运任务,如图1所示。为了更加直观,人与机器人沿水平方向协调搬运重物的单自由度模型如图2所示。
图1 人与机器人协调搬运
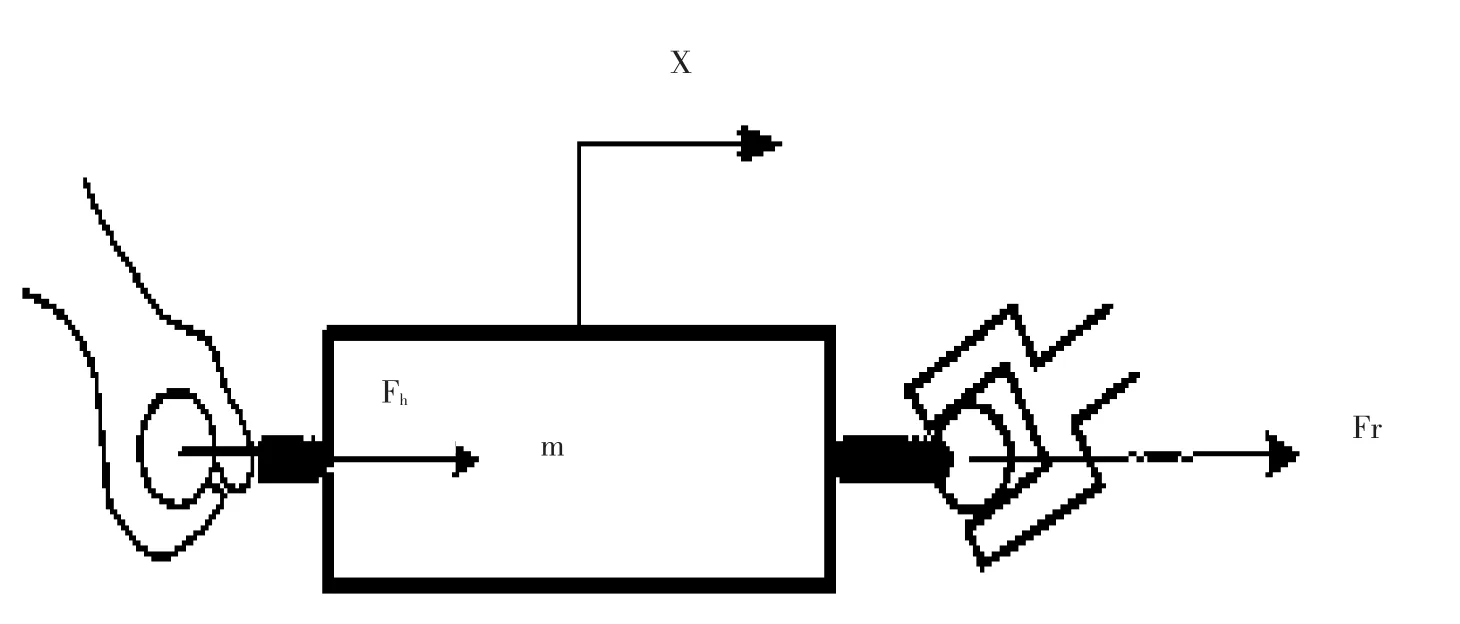
图2 人与机器人沿水平方向协调搬运
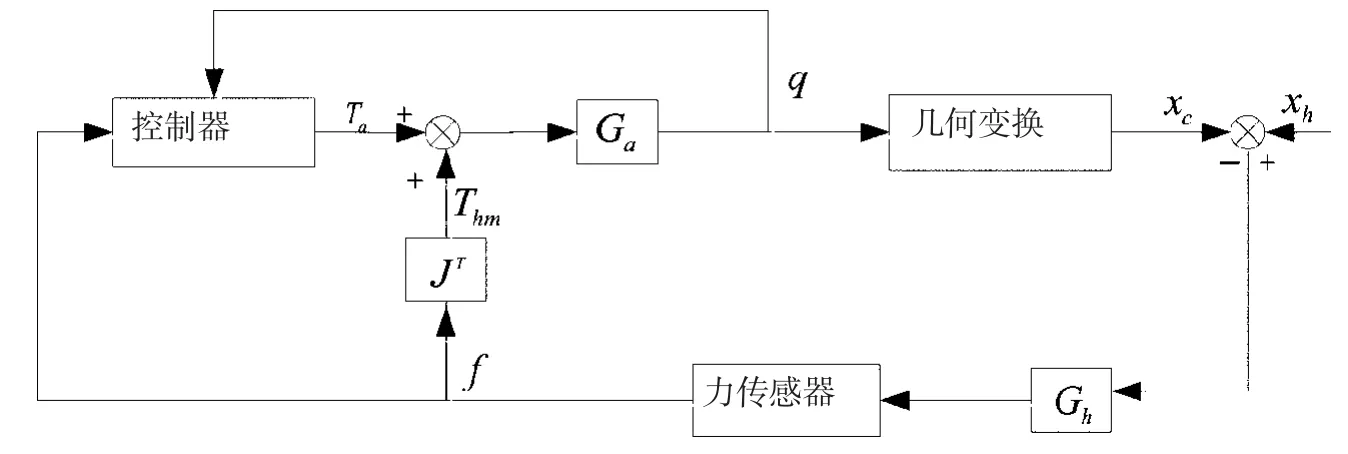
图3 人机协调运动直接力控制原理图
如图2所示,设物体的重量为m,位移为x,人施加的力为Fh,机器人施加的力为Fr。在人与机器人合作任务中,机器人不应该充当主动角色,而必须跟随操作者的运动,为操作者提供辅助。操作者控制物体的位置,并且承担部分负载,而其他负载则由机器人承担[1]。此方法的缺点为:当负载比较大的时候,启动、停止及换向时,负载惯性力大,操作者施加的力大,操作者负担重。
1.2 阻抗控制
阻抗控制应用于人机协调运动控制中,通过调节阻抗参数,调整机器人末端与人机之间相互作用力的动态关系,所对应的物理含义是通过调整机器人的跟随特性,调整人操作的舒适度,但是对人操作的舒适性还没有明确的定义。
阻抗控制方法的根本思想是通过控制机械系统的位置与外界作用力之间的动态关系,从而达到控制的目的,将机械系统等效为“质量-弹簧-阻尼”模型,建立机械系统力与位移变量之间的动态关系,通过调节惯性、阻尼和刚度系数,实现机械系统的动态调节[2]。
Hogan阻抗控制算法最具代表性,将接触力信息和位置信息纳入统一的控制体系。因此,该控制器的设计调整依据输出阻抗,建立力、位置、速度的阻抗关系式,从而完成既定的任务。通过该算法将输入力信号引入位置控制中,形成包含交互力和位置信息的闭环控制。调整机器人的阻抗参数是本算法研究的难点和重点[3]。
阻抗控制依据实现方式不同可以分为基于位置的阻抗控制和基于力的阻抗控制。基于力的阻抗控制需要建立精确的动力学模型,而基于位置的阻抗控制方法则是通过跟踪期望的位置来实现柔顺控制。
1.3 直接力控制
在机器人与环境交互时,直接力控制是通过力反馈环路直接控制接触力实现对期望接触力的控制,然而机器人与人发生交互时,是依据力传感器获取人与机器人之间在操作空间的相互作用力,并且依据该力信息以及机器人的静态模型设计控制转矩,控制机器人关节的运动,从而进一步使人机间交互力最小化[4]。人机协调运动直接力控制原理如图3所示,其中Ga表示机器人的动力学模型,Gh表示人机之间的交互模型,f表示人与机器人在操作空间的相互作用力,J表示机器人雅可比矩阵,Ta为驱动器施加的力矩,Thm为操作者施加的力矩,xc代表骨骼服操作空间的位置信息,xh代表操作者的位置信息。直接力控制也依赖于动力学模型的建立。
1.4 智能控制
智能控制是机器人控制的发展趋势,智能控制分为多个方向,如模糊逻辑控制、神经网络控制、专家系统控制、机器学习控制以及遗传算法等。J.Moody和C.Darken在1980年提出RBF神经网络,其是一种3层前向网络采用这个控制策略,能提高系统的精度、鲁棒性,适合应用于实时控制系统中。Connolly等设计的机器人控制器,将多层前向神经网络用于力/位混合控制,传感器检测力和位置,经过神经网络计算之后选择矩阵和人力约束,并进行实验验证控制的可行性。杨智勇等人[5]介绍了RBF神经网络在外骨骼机器人轨迹规划中的应用,通过非线性映射计算,实时估计骨骼服的运动轨迹。
从当前的研究来看,智能控制往往应用到机器人的力控制中进行相应的计算和分析,智能控制和传统的控制相结合,可以解决传统控制的难题。比如,在人机协调运动中,操作者的运动意图不能精准估计,采用智能控制可以找到人机交互力与运动状态的非线性映射关系,因此智能控制在人机协调中的应用,仍然需要不断去尝试和探索。
2 人机协调运动控制的关键技术
2.1 人体运动意图和环境信息的感知
机器人的感知方式主要包括视觉、力觉、听觉、脑电波、表面肌电信号等。在某些场合,因为视觉感知易受环境光的影响,听觉感知易受外界噪音的影响,脑电波和肌电信号不稳定等,因此力觉感知是最有效、最直接的感知方式。力感知方式具有广泛的应用,如步行辅助装置、护理机器人、建筑机器人、助力手推车等都是基于力感知的人机协作系统。目前,以力感知应用最为广泛,但是人机协作系统,人是主动的,机器人是被动的,人机之间的交互力信息存在噪声,导致人机系统容易振动,不稳定。通常采用滤波器让交互力顺滑,滤波器选择不当,会造成延时现象,对机器人的跟随响应有影响,系统的可操作性变差。
2.2 机器人柔顺动作与人自然交互的控制策略
目前,基于力信息的人机协调运动控制,还存在如下问题:①在启动、停止及改变移动方向时,因惯性导致动作不柔顺;②人的作用力过大,导致突然大的加速度,操作者想在期望的位置停下来,此时手臂刚度比较大,人机协作系统发生震荡,让操作者感到不舒服,进而影响机器人的可操作性。因此,如何防止过大加速度或不连贯动作,保证系统的稳定性,让操作者感觉到操作舒适、安全,是需要进一步研究的内容之一。
2.3 机器人与人共享工作空间时人身安全的实现方法
由于人机协作系统需要机器人与人共享工作空间,因此在人机协作系统工作时,在非结构化的环境中,机器人如何感知、预知危险,如何回避危险,以及如何在轨迹规划中考虑安全因素等内容,是系统运行中确保人的安全的关键。
3 结语
目前,人机协调运动控制方法多是基于人机交互力信息,机器人需要通过力信息识别操作者的运动意图,并跟随操作者运动。在人机交互力信息的基础上,融合视觉信息、脑电信号、肌电信号等多源信息,这是获取人体运动意图的发展方向。应用智能控制方法,应用人工智能最新研究成果,可以提高人机协调运动的柔顺性。考虑操作者的运动特性,实现机器人预知危险,是实现人机协调运动,保证人身安全的途径之一。
[1]Rahman M M,Ikeura R,Mizutani K.Investigation of the impedance characteristic of human arm for development of robots to cooperate with humans[J].JSME International Journal Series C Mechanical Systems,2002(2):510-518.
[2]A.B.Zoss,Kazerooni H,Chu A.Biomechanical design of the Berkeley lower extremity exoskeleton(BLEEX)[J].IEEE/ASME Transactions on Mechatronics,2006(12):128-138.
[3]蒋再男,刘宏,黄剑斌,等.基于阻抗内环的新型力外环控制策略[J].航空学报,2009(8):1515-1520.
[4]杨智勇,归丽华,杨秀霞,等.骨骼服直接力控制方法研究与仿真[J].系统仿真学报,2009(24):7868-7872.
[5]杨智勇,顾文锦,张静,等.单兵负荷骨骼服的力控制理论与方法[M].北京:国防工业出版社,2013.
Research Advances and Key Technology Analysis of Man-machine Coordinated Motion Control
Yue Haibo
(Zhengzhou Institute of Mechanical and Electrical Engineering,Zhengzhou Henan 450015)
Man-machine coordinated motion control is a kind of robot motion control mode which is coordinated with human motion.In daily life,It is common of people to cooperate with others,but human mechanical strength is limited,unable to complete load handling beyond their limits,so in order to achieve full advantages of human and robot, the method of man-machine cooperation is proposed,applied to the exoskeleton system,these man-machine cooperation systems have a common characteristic is that people and robots is in contact in the process of movement.The man-machine coordinated motion control method mainly includes load distribution control,impedance control,direct force control,intelligent control,etc.
robot;man-machine coordinated;motion control
TP242
A
1003-5168(2017)07-0042-03
2017-06-02
岳海波(1986-),男,硕士,工程师,研究方向:机电一体化工程。
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31 09:04:00
南都周刊(2021年3期)2021-04-22 16:43:49
作文成功之路·小学版(2019年8期)2019-09-18 01:12:04
无线互联科技(2018年20期)2018-12-27 11:36:00
读者(2017年14期)2017-06-27 12:27:06
海外星云(2016年7期)2016-12-01 04:17:50
温州医科大学学报(2016年9期)2016-10-31 07:47:26
太空探索(2016年5期)2016-07-12 15:17:58
读写算(下)(2016年9期)2016-02-27 08:46:31
哈尔滨医药(2015年4期)2015-12-01 03:58:01
