基于GA-ML-PMHT的多基站无源协同定位方法⋆
2017-08-28 15:04:34郭云飞滕方成曾泽斌
火力与指挥控制 2017年7期
郭云飞,滕方成,曾泽斌
(1.杭州电子科技大学自动化学院通信信息传输与融合技术国防重点学科实验室,杭州 310018;2.浙江理工大学机械与自动控制学院,杭州 310018)
基于GA-ML-PMHT的多基站无源协同定位方法⋆
郭云飞1,滕方成1,曾泽斌2
(1.杭州电子科技大学自动化学院通信信息传输与融合技术国防重点学科实验室,杭州 310018;2.浙江理工大学机械与自动控制学院,杭州 310018)
针对无源协同定位系统中低可观测目标的航迹初始及维持问题,提出一种基于遗传算法的极大似然概率多假设的多基站无源协同定位方法。首先,建立多基站无源协同定位系统数学模型。其次,提出基于极大似然概率多假设的无源协同定位航迹初始算法,并首次利用遗传算法解决极大似然概率多假设中的优化求解问题,以提高目标检测跟踪性能。最后,通过滑窗法实现航迹维持。仿真结果表明,所提方法能够有效解决多基站无源协同定位系统中低可观测目标的航迹初始及维持问题。
无源协同定位,低可观测目标,航迹初始,极大似然概率多假设,遗传算法
0 引言
无源协同定位[1](Passive Coherent Location,PCL)指的是雷达本身不发射电磁波,借助非合作外辐射源(如手机通信基站[2],数字电视信号基站[3]等)发射的电磁波来检测跟踪目标。与传统的有源雷达[4]相比,PCL系统体积小,抗干扰能力强,自身静默,具有较强的生存能力。除此外,PCL系统利用双、多基站的空间分布性大幅提高了系统对低空和隐身目标的探测性能[1],受到了国内外学者的广泛关注[1-3,5-9]。
由于PCL系统中被检测目标的信噪比很低,如何利用PCL系统实现低可观测目标的航迹初始及维持[5-6]是亟待解决的关键问题之一。文献[7]提出修正的扩展卡尔曼粒子滤波算法改善双基站PCL系统中目标跟踪性能,文献[8]研究了高斯-厄密特滤波算法改善PCL系统中多目标的跟踪性能。文献[7-8]都假设目标航迹初始状态为已知,重点在于航迹维持。为了解决PCL系统中低可观测目标的航迹起始及维持问题,本文提出一种基于遗传算法的[10]极大似然概率多假设[11-12](Genetic Algorithm Maximum Likelihood Probabilistic Multi-Hypothesis,GA-ML-PMHT)的多基站无源协同定位方法。该方法基于多基站PCL系统的检测跟踪数学模型,通过对多帧测量进行积累,形成对数似然函数。再利用遗传算法优化求解,以实现航迹初始化。最后采用滑窗[13]批处理技术,进行航迹维持。
1 问题描述
考虑图1所示的多基站PCL系统,Tx表示外辐射源,Rxj表示第j个接收站,Ox表示目标,dORj表示Ox与Rxj间的距离,dOT表示Ox与Tx间的距离,dRTj表示Rxj与Tx间的距离。Rxj由监控天线和参考天线组成,其中监控天线接收由Tx发射且经Ox反射的信号,参考天线接收Tx发射的直达信号。通过比较回波信号和直达信号,实现Ox的无源定位。

图1 多基站PCL系统示意图
记Ox在第k帧的状态为,其中和分别表示Ox在x,y方向的位置和速度。假设在测量时间内,Ox近似作如下匀速直线运动:

为实现低可观测目标的航迹起始,通常作如下基本假设[10-11]:①不同帧之间的测量相互独立;②每帧的测量集中包含任意个源于目标的测量,检测概率为Pd,其余测量为杂波;③杂波在测量空间Ωj内服从均匀分布,杂波个数服从参数为的泊松分布。基于如上假设,PCL系统中低可观测目标的测量模型为:


2 GA-ML-PMHT
基于GA-ML-PMHT多基站PCL检测跟踪的基本思想是首先通过对Rxj获取的测量信息多帧积累,构建对数似然比(Log Likelihood Ratio,LLR),利用GA优化算法求解LLR的最优估计,然后进行多传感器数据融合获得最终状态估计实现目标航迹初始化,最后采用滑窗法实现目标航迹维持。
2.1 LLR的构建
根据PCL测量模型(2)和全概率理论,第j个雷达K帧测量集合的 LLR[10-11]为:

其中,π0表示测量为杂波的先验概率,π1为测量源自目标的先验概率,V为测量空间大小,表示测量源自目标的似然函数:

2.2 LLR的优化求解
在ML-PMHT框架下,目标状态估计问题转化为求解如下优化问题:

由此可见,能否获得精度足够高的全局优化解,直接影响ML-PMHT的算法性能。为了提高ML-PMHT的优化性能,改善目标检测跟踪结果,本文提出基于GA的优化求解方法。遗传算法是一种基于自然选择和基因遗传原理的随机并行搜索算法,是一种不需要先验信息的搜索全局最优解的高效优化方法,其具体步骤为:
Step1:编码和产生初始群体
根据问题选择相应的编码方法,并随机产生一个H 个染色体组成的初始群体:popt,r,t=1,r=1,2…H。
Step2:计算适应度值
对群体popt中的每一条染色体popt,r计算它的适应度:fr=fitness(popt,r)。
Step3:判断算法遗传代数是否达到最大遗传代数,若达到则输出搜索结果Xˆj1作为目标的状态估计,否则继续执行以下步骤。
Step4:选择操作
Step5:交叉操作
以概率Pc交配,得到一个有H个染色体组成的群体crosspopt。
Step6:变异操作
用某一较小的概率Pm使染色体的基因发生变异,形成新的群体mutpopt,完成一次遗传操作,且将其作为下一代遗传操作的父代,即popt+1=mutpopt,返回Step2。
2.3 多传感器数据融合
多传感器数据融合,首先各传感器利用获取的测量信息分别估计目标状态,然后对所得结果进行融合,得到目标状态的最终估计。融合准则为:根据传感器的测量误差计算出估计位置误差 Rmsej,各传感器的信任权重系数,则融合后目标状态估计为:

2.4 滑窗法实现航迹维持
滑窗法即当 Rxj获取新一帧的测量信息后,移除W帧测量中的第一帧,将最新获得的测量作为滑窗中的第W帧,根据测量集来估计目标第k帧的状态:

3 仿真分析
本节通过两个典型场景说明所提方法的有效性。场景1:目标不存在;场景2:目标中途进入并离开探测区域。场景参数如下:探测时间70 s,测量间隔1 s,Ox初始状态为 [4 km,0.1 km/s,5 km,0.1 km/s]T,Rx1的位置为[0 km,0 km],Rx2的位置为[-5 km,Tx的位置为[0km,10km],Pd=0.9,=5。算法参数如下:π0=0.95,π1=0.05,V=2.4×107,W=20,GA-ML-PMHT算法调用Matlab工具箱GA函数,参数为:种群大小20,创建初始种群函数为Constraint dependent,初始种群向量为[0;1],交叉概率为0.8,遗传代数100,变异率为0.2,算法停止下界1e-6。计算机参数如下:Inte(lR)Core(TM)i5 CPU M480 2.67 GHz,内存2.00 GB,32位操作系统;仿真软件为MATLAB2013a。
场景1:目标不出现
图2给出了目标不出现情况下,速度和位置分别取真值时,位置解与速度解的分布。可以看出存在多个位置解和速度解,经门限检测后[11],判定目标不存在。

图2 目标不存在时LLR解的分布
场景2:目标出现
假定目标第31 s出现,第51 s消失,出现20 s。图3分别给出了角度和距离差的原始测量。图4分别给出了LLR当速度和位置取真值时,位置解和速度解的分布。可以看出,目标存在时,经门限检测后,目标的位置解和速度解是唯一的。

图3 雷达获取的原始测量

图4 目标存在时LLR解的分布
图5给出了GA-ML-PMHT算法跟踪效果图,由图可知该算法能有效检测跟踪目标。表1给出了滑窗宽度对GA-ML-PMHT算法跟踪精度的影响,从表1可得知,随着滑窗宽度的增大,跟踪精度也逐渐提高。
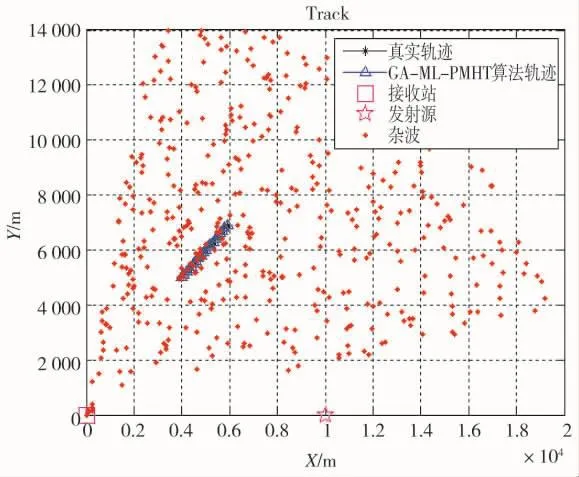
图5 GA-ML-PMHT算法跟踪效果图

表1 不同滑窗宽度时GA-ML-PMHT算法的跟踪精度
进一步,仿真对所提方法与基于网格搜索(Grid Search,GS) 的 GS-ML-PMHT和基于拟牛顿法(Quasi-Newton Methods,QN)的 QN-ML-PMHT进行了比较。图6分别给出了3种算法的距离估计RMSE和速度估计RMSE。表2比较了3种算法在不同参数时的运行时间。可见所提方法较QN-ML-PMHT算法牺牲少量实时性较大提高了估计精度,比较GS-ML-PMHT算法提高了估计精度和实时性,改善了多基地PCL系统中对低可观测目标的检测跟踪性能。

图6 3种算法的跟踪误差

表2 Pd=0.9 3种算法在不同值时所耗费的时间
4 结论
本文针对多基站PCL系统下的低可观测目标检测跟踪问题,提出了GA-ML-PMHT算法。经仿真分析,与同类算法相比,所提算法能有效地减小跟踪误差,提高跟踪性能。接下来的工作将重点研究杂波环境下的PCRLB推导与分析,以及该算法在门限检测方面的研究。
[1]GRIFFITHS H D,BAKER C J.Passive coherent location radar systems.Part 1:Performance prediction[J].IET Radar Sonar Navig.,2005,152(3):153-159.
[2]LI H W,WANG J.Particle filter for manoeuvring target tracking via passive radar measurements with glint noise[J].IET Radar Sonar Navig.,2012,6(3):180-189.
[3]RADMARD M,KARBASI S M,MOHAMMAD M N.Data fusion in MIMO DVB-T-Based passive coherent location[J].IEEE Transactions on Aerospace and Electronic Systems,2013,49(3):1725-1737.
[4]李程,王伟,施龙飞,等.基于多源信息融合的有源雷达组网方式序贯识别方法[J].电子与信息学报,2014,36(10):2456-2463.
[5]孔云波,冯新喜,鹿传国,等.被动传感器航迹起始算法[J].光电工程,2011,38(8):60-66.
[6]CHOI S,CROUSE D,WILLETT P,et al.Multistatic target tracking for passive radar in a DAB/DVB network:initiation[J].IEEE Transactionson Aerospaceand Electronic Systems,2015,51(3):2460-2469.
[7]申正义,闫抒升,王晓军,等.修正的EKPF算法在固定单站被动目标跟踪中的应用[J].现代防御技术,2015,43(2):116-121.
[8]李彬彬,冯新喜,李鸿艳,等.纯方位被动多传感器多目标跟踪算法.红外与激光工程,2012,41(5):1374-1378.
[9]李洪斌,高宪军.基于频率变化率测量的无人机单站无源定位技术的研究 [J].四川兵工学报,2015,36(8):141-144.
[10]HUANG S C,JIAU M K,LIN C H.Optimization of the carpool service problem via a fuzzy-controlled genetic algorithm[J].IEEE Transactions on Fuzzy Systems,2015,23(5):1698-1712.
[11]SCHOENECKER S,WILLETT P,SHALOM Y B.ML-PDA and ML-PMHT:Comparing multistatic sonar trackers for VLO targets using a new multitarget implementation[J].IEEE Journal of Oceanic Engineering,2014,39(2):303-317.
[12]SCHOENECKER S,WILLETT P,SHALOM Y B.Extreme-Value Analysis for ML-PMHT,Part1:threshold determination[J].IEEE Transactions on Aerospace and Electronic Systems,2014,50(4):2500-2514.
[13]郭云飞,林茂,林岳松,等.基于滑窗批处理的低检测概率无源定位[J].光电工程,2009,36(7):18-23.
A GA-ML-PMHTBased Multistatic PassiveCoherent Location Method
GUO Yun-fei1,TENG Fang-cheng1,ZENG Ze-bin2
(1.Key Laboratory of Fundamental Science for National Defense-Communication Information Transmission and Fusion Technology,Automation School,Hangzhou Dianzi University,Hangzhou 310018,China;2.School of Mechanical Engineering&Automation,Zhejiang Sci-Tech University,Hangzhou 310018,China)
In order to track very low observable targets with a multistatic passive coherent location system,a genetic algorithm maximum likelihood probabilistic multi-hypothesis method is proposed.The contributions consist of three aspects.First,the mathematical model for target detection and tracking is established.Second,a maximum likelihood probabilistic multi-hypothesis method is presented for track initialization,and the genetic algorithm is used for optimization and hence the estimation performance.Last,the track maintenance is achieved in a sliding window manner.Simulation results show the effectiveness of the proposed algorithm.
multistatic passive coherent location,low observable targets,track initialization,maximum likelihood probabilistic multi-hypothesis,genetic algorithm
TN958.97
A
10.3969/j.issn.1002-0640.2017.07.007
1002-0640(2017)07-0029-04
2016-06-05
2016-09-05
国家自然科学基金资助项目(61573123)
郭云飞(1978- ),男,河北武安人,副教授,博士。研究方向:目标检测跟踪,信息融合。
猜你喜欢
青年歌声(2019年12期)2019-12-17 06:32:32
电子制作(2019年12期)2019-07-16 08:45:14
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
北京航空航天大学学报(2017年6期)2017-11-23 05:57:06
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32
统计与决策(2017年2期)2017-03-20 15:25:24
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
互联网天地(2016年2期)2016-05-04 04:03:23
智能系统学报(2015年4期)2015-12-27 09:38:39