
电梯控制系统的速度控制策略研究
2017-08-28 01:32孙建领
无线互联科技 2017年15期
孙建领
(南京科技职业学院 江苏 南京 210048)
电梯控制系统的速度控制策略研究
孙建领
(南京科技职业学院 江苏 南京 210048)
通过建立电梯运行速度曲线的数学模型,文章研究了根据设定时间参数与楼层间距自动生成的速度曲线,发现一种提高电梯运行时人在电梯厢的舒适感与运行效率的改进方法,结果表明除了控制电梯控制系统的运行速度外,为提高电梯启动时的舒适感还需要在负载补偿中应用一种基于速度的控制技术。
数学模型;速度曲线;速度控制
1 速度模块的设计原理
电梯主控制器采用了32位RISC芯片LPC2378作为微处理器。速度模拟量接口电路是由运算放大器TL084C构成的,它本身就是一个同相比例放大电路,其输入电压信号DA_OUT来自于微处理器的D/A模拟通道输出。LPC2378控制主芯片内集成了一路10位的模拟量输出通道,具有缓冲输出锁存器。可通过软件编程设定相应寄存器的值来确定LPC2378自带的转换器的转换速率和转换功率,其最高转换速率可达1 MHz。根据放大电路的基本知识可得速度模拟量的输出电压与输入电压之间的数学表达式如下。

负载补偿模拟量输出电路是一个由TL084C构成的差分式减法放大电路,其输入信号分别来自MAX515数模转化器和MC1403电压基准芯片。MAX515内部缓冲放大器其固定增益值为2,则该放大电路输入输出关系的数学表达式推导如下所示。

而本文DA电路中VREF值为2.5 V,所以经MAX515放大后,输出电压最大为4.99 V,最小为0 V。
结合本文所提的差分式减法放大电路其输入输出数学表达式,再根据虚短和虚短原理有:


由以上3式得出如下表达式其中Vp和Vn分别是指TL084的同相输入端电压和其反相输入端电压,V1为MAX515的输出电压,V2为2.5 V的输入电压,Vo为输出电压。因为MAX515的输出电压DA_OUT2的变化范围是0~5 V,所以输出电压Vo的变化范围是-10~10 V,且两者成线性比例关系。
2 电梯运行速度控制研究
电梯速度控制的原则是既要满足电梯快速运行的要求,也要保证电梯运行时人在厢内的舒适性。总体的控制流程是先通过主控制器通过变频器,再由变频器实现对电机的速度控制。
目前国内大部分的电梯曳引机一般采用交轴电机,调速方式为VVVF。无论异步还是同步电机。电磁转矩控制的关键是电流矢量的控制。本文将在下面的内容中建立电动机矢量控制系统的数学模型,并对此加以分析。
(1)电压方程。

上式中RS为定子电阻,Ld,Lq分别为等效两相电子绕组d,q轴自感,Lmd为d轴定子与转子绕组间的互感,If为转子虚拟等效励磁绕组的电流,Ψf为转子磁钢在定子绕组上的耦合磁链,ωm为机械角速度,ω为电角速度。
应用常用控制策略id=0,cscφ=1,代入简化得后面3式:
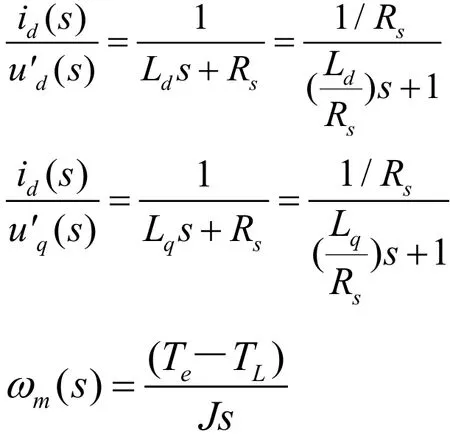
得出转速结构如图1所示。

图1 矢量控制转速环结构
3 桥厢加速度研究
加速度进入系统时只是一组数字,需要经过相应的处理,才能分析出数据,我们用到了快速傅里叶变换和低通滤波算法。
首先对现场回来的一组数据,经过离散应用FT,得到

再通过低通滤波器,过滤震动加速度,因为要求在其通带频率内有最大平坦度,再考虑到实时性要求,这里本文选择截止频率10 Hz,采样频率512 kHz,2阶的巴特沃兹滤波器。
4 速度控制的实现
按国标GB/T 24474-2009规定,用数学表达式总结如下:
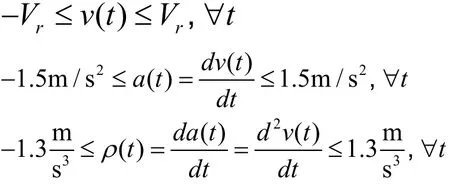
其中a代表加速度,ρ代表加加速度,本文采用S速度曲线作为电机的目标速度轨迹,如图2所示。
经过计算可以获得各个数据点的速度信息,在电机速度实现中,主控器生成速度曲线的数字量,D/A转换后,传递给变频器,通过变频器来控制电机。在时,因为电机电磁转矩与交轴电流成比例关系,所以就转化为对电流的控制,电流的响应速度很快,采用实时计算即可,主控器只需发送目标速度信息。
以图2的0—t3段为例,iq0为交轴电流。由于摩擦力等误差的存在,转化后的电流曲线和理想肯定有偏差,因此在电流曲线结束前加入速度环闭环控制。在段中,选取t3时刻的速度为目标速度,提高此段速度环的比例系数,减少抖动,到t4时刻再减少比例系数,加强恒速控制的平稳性。后面的减速阶段与类似。图3为电流环框图。其中Uqlripple为电机和驱动引起的电压扰动之和,Uqlcouple为电流环中耦合总量,Uqldecouple为环中解耦量综合,理想状态下Uqlcouple=Uqldecouple。
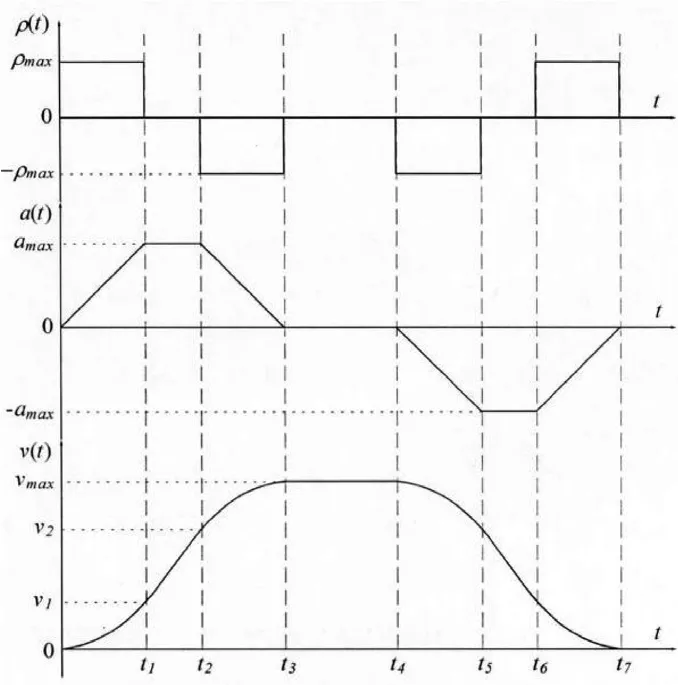
图2 电机的目标速度轨迹
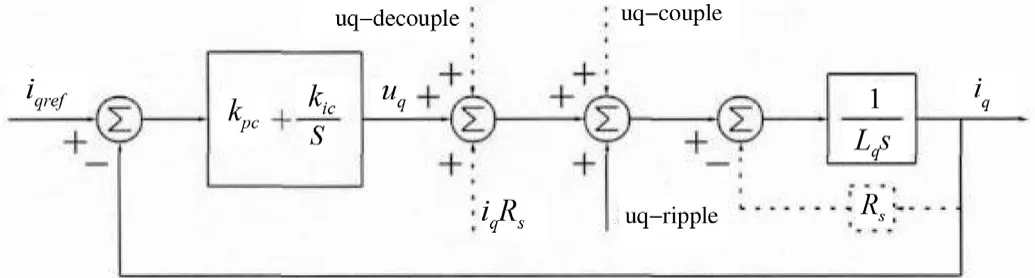
图3 电流环示意
5 结语
本文主要研究电梯控制系统中的速度控制策略,即如何在保证乘客舒适的情况下,提高电机运行性能。需要注意的是电梯拽引绳对加速度的影响随着轿厢及对重物的运动,电机两边的拽引绳长度不断地变化,电机受力情况也随着改变,而绳索的重量与长度成正比,按照运行距离估算,对于绳索的补偿力矩实施叠加在电流环的给定中,此外还需将绳索的转动惯量叠加到系统中。
[1]BECKER A.Microcontroller based elevator system[C].30th International Spring Seminar, 2008:451-455.
[2]XIAOYUAN H, ZHENGYU L.A novel scaling method for sinusoidal quadrature encode[C].Wuhan:International Power Electronics and Motion Control Conference,2009:826-829.
[3]李时杰,李耀华,陈睿.背靠背变流系统中优化前馈控制策略的研究[J].中国电机工程学报,2006(22):74-79.
[4]高国贤,马福军.电梯正弦运行速度曲线的分析与设计[J].自动化技术及应用,2007(26):19-20.
[5]李时杰.基于Back-to-Back变流技术的调速系统的研究[D].北京:中国科学院电工研究所,2006.
Research on speed control strategy of elevator control system
Sun Jianling
(Nanjing Polytechnic Institute, Nanjing 210048, China)
Through the establishment of mathematical model of elevator running speed curve, this paper studies the speed curve automatically generated according to the set time parameters and fl oor space, an improved method for improving the comfort people in the elevator car and operation ef fi ciency when the elevator is running, the results showed that besides controlling the operation speed of elevator control system, in order to improve lift start comfort, a kind of control technology based on speed is also needed to applied in load compensation.
mathematical model; velocity curve; speed control
项目名称:江苏省“六大人才高峰”;项目编号:2014-wlw-011。
孙建领(1966— ),男,江苏丰县,硕士,研究员级高工,副教授;研究方向:电气工程,高等职业技术教育。
猜你喜欢
山东冶金(2019年3期)2019-07-10
测控技术(2018年12期)2018-11-25
消费导刊(2018年10期)2018-08-20
小学生学习指导(低年级)(2018年3期)2018-01-31
电子制作(2016年21期)2016-05-17
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
电测与仪表(2015年11期)2015-04-09
铁路通信信号工程技术(2014年5期)2014-02-28
