
电动车用永磁同步电机矢量控制策略
2017-08-17 02:58张宽文红举范钰琢熊亮
汽车工程师 2017年1期
张宽 文红举 范钰琢 熊亮
(重庆幻速汽车配件有限公司)
伴随科学技术的飞速发展,尤其是电力电子技术、微电子技术、电机制造技术以及新型电机控制技术的快速发展,体积小、质量轻、功率密度大、低速输出转矩大及效率高等优点的永磁同步电机在诸多领域得到了广泛应用,其矢量控制技术具有转矩响应好、速度控制精确及零速实现全负载等优点。本研究选择永磁同步电机作为电动车的驱动电机,电动车由于具有“零排放”、低噪声及节能等优点,成为当今汽车研究、开发和推广应用的热点之一。文章采用高性能的矢量控制策略,来有效地控制驱动电机的输出特性。
1 电机矢量控制中坐标系之间的变换
1.1 Clarke变换
Clarke变换是将三相静止坐标系上的数学模型变换为两相静止坐标系上的数学模型[1]10,变换公式,如式(1)所示。

式中:iα,iβ——定子电流在α,β轴的分量,A;
ia,ib,ic——定子A,B,C相电流,A。
1.2 Park变换与逆变换
Park变换是把矢量从两相静止坐标系变换到两相旋转坐标系中,而Park逆变换是把矢量从两相旋转坐标系变换到两相静止坐标系中[1]12。
Park变换公式,如式(2)所示。

Park逆变换公式,如式(3)所示。

式中:id,iq——定子电流在d,q轴的分量,A;
θ——转子实际电角位移,rad。
永磁同步电机的空间矢量图,如图1所示。图1中A,B,C为定子三相静止坐标系;α-β为定子两相静止坐标系;d-q为转子两相旋转坐标系;θ为转子空间位置角[2]。

图1 永磁同步电机空间矢量图
2 永磁同步电机的数学模型
根据电机工作原理,简化分析过程:1)假设永磁同步电机的反电势是正弦波;2)忽略铁芯饱和效应,不考虑涡流和磁滞损耗;3)永磁铁在气隙中产生正弦磁场,无高次谐波。建立的永磁同步电机d-q转子两相旋转坐标系数学模型,包括电压方程、磁链方程及转矩方程[3-4],如式(4)~(6)所示。
电压方程:
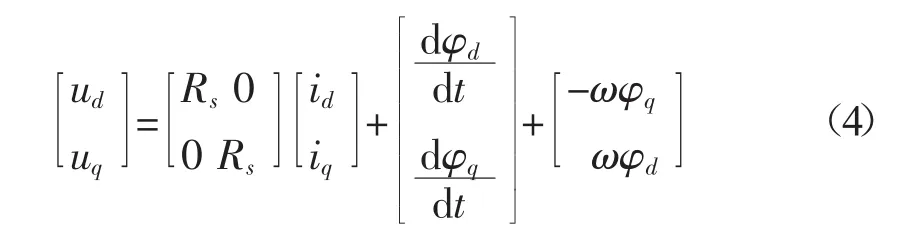
磁链方程:

转矩方程:

式中:ud,uq——定子电压d,q轴分量,V;
id,iq——定子电流d,q轴分量,A;
φd,φq——定子磁链d,q轴分量,Wb;
Ld,Lq——定子绕组d,q轴电感,H;
Rs——定子电阻,Ω;
φf——转子永磁体产生的磁链,Wb;
Te——电机电磁转矩,N·m;
ω——转子实际角速度,rad/s;
t——时间,s;
p——电机转子极对数。
3 永磁同步电机矢量控制策略
根据不同的工作场合,永磁同步电机可选择不同的矢量控制策略,常用的矢量控制策略主要有:id=0控制、最大转矩/电流控制、弱磁控制及最大输出功率控制等。针对电动车驱动电机在基速以下的恒转矩和基速以上的恒功率输出特性,当电机转速在基速以下时,采用id=0控制,当电机转速在基速以上时,采用弱磁控制。
3.1 id=0控制
因电机转速在基速以下时,采用id=0控制,所以在id=0控制策略中,定子电流中只有iq,因此只需要控制iq的大小就可以控制其输出转矩和转速,故定子转矩方程和电压方程可以改写为:
采用id=0的矢量控制策略,永磁同步电机具有控制简单、灵活及转矩性能好等特点,并且Te只受iq控制,故永磁同步电动机的矢量控制类似于直流电动机的控制。
3.2 弱磁控制
当电机转速在基速以上时,采用弱磁控制。由于永磁同步电机采用永磁体进行励磁,励磁磁动势无法调节,只有通过控制id来消弱气隙磁场,因为当id为负时,d轴电枢反应起到去磁的作用,进而实现弱磁增速控制[5]。
永磁同步电机弱磁调速公式,如式(10)所示。

当定子电压达到极限时采用弱磁控制,定子电压维持不变,id为负值进行弱磁控制,id绝对值越大,转速就越高。
4 仿真试验分析
根据永磁同步电机矢量控制系统的仿真模型,运用MATLAB/Simulink软件进行仿真分析,永磁同步电机矢量控制系统仿真截图,如图2所示[6]。

图2 永磁同步电机矢量控制系统仿真截图
仿真参数设定:Rs=2.875 Ω,Ld=Lq=8.5 mH,电机转动惯量 J=1×10-3kg·m2,摩擦因数为 0,p=4,直流母线电压ucd=100 V,载波PWM的调制周期为100 μs。设仿真时间为0.4 s,电机以空载启动,在0.1 s时加载3 N·m。
仿真试验得到相电流、转矩和转速响应仿真曲线,如图3所示。
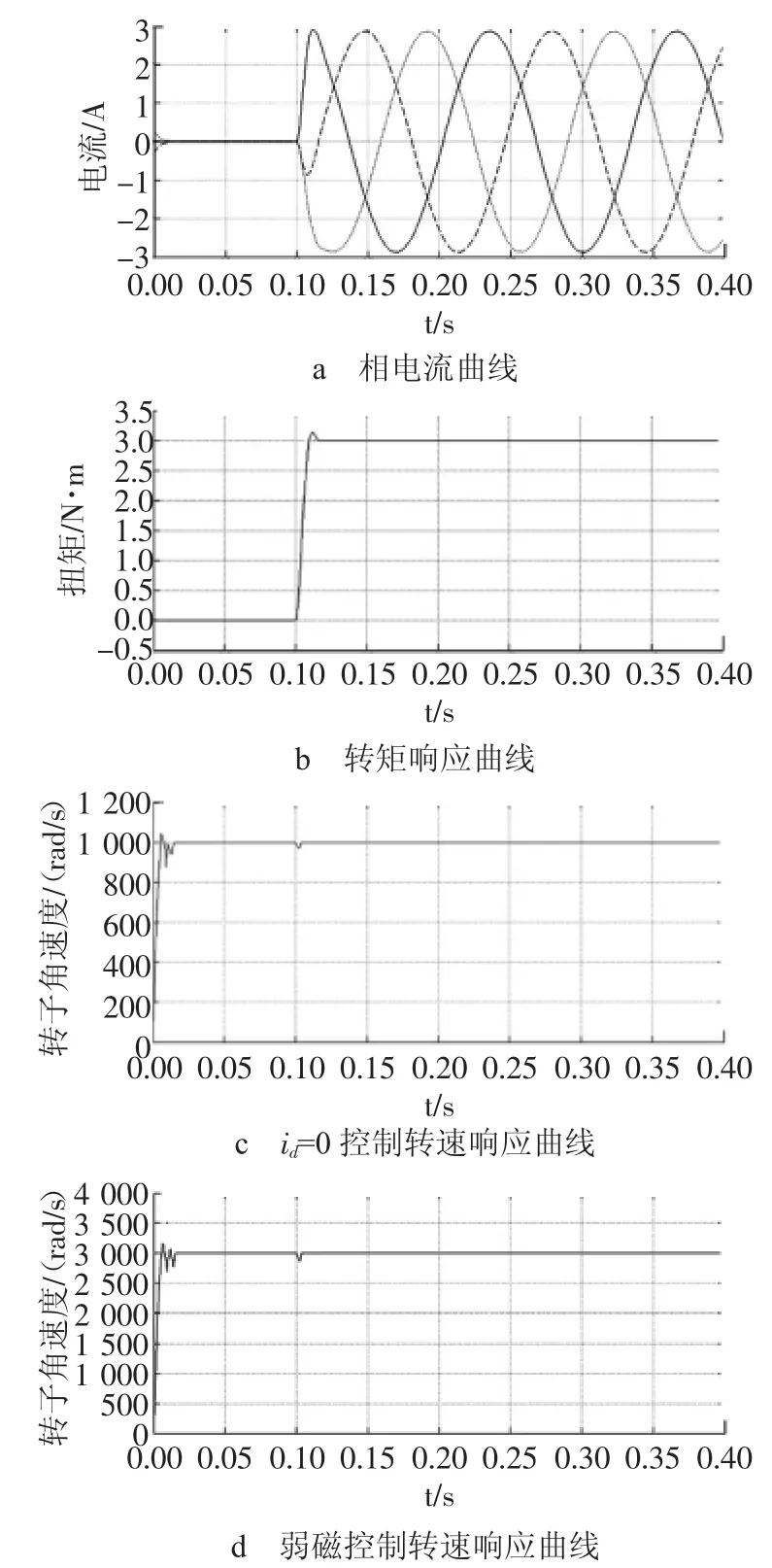
图3 永磁同步电机矢量控制系统响应曲线
由图3可知,电流和转矩冲击较小,启动过程较快速和平稳;在t=0.1 s时突加负载,系统转速突降,但较快恢复到平稳,系统稳态无静差。id=0控制,转矩的变化主要取决于交流电流,能快速、精确地控制转矩,且系统具有良好的鲁棒性和动态性能;弱磁控制,电机调速范围提升明显,速度响应快,满足电动汽车的超车需求。
5 结论
基于永磁同步电机的数学模型和矢量控制策略,运用MATLAB/Simulink软件对其矢量控制系统进行仿真分析。仿真结果表明:永磁同步电机矢量控制策略满足控制系统对快速性、稳定性及动态性能的要求,解决了电机实际控制中输出转矩与转速波动问题;另外在此基础之上,可引入模糊控制、神经网络及滑模变结构控制等智能控制技术,实现对永磁同步电机控制系统的高性能控制,以进一步提高系统控制精度和鲁棒性。因此制定一个好的控制策略,实现整个系统的最优控制,对电动车整个电控系统的开发具有重要的意义。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
