
遥感卫星滚动式动态任务规划技术
2017-08-16 08:21刘晓丽高朝晖何川东
无线电工程 2017年9期
刘晓丽,杨 斌,高朝晖,何川东
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081; 2.北京市遥感信息研究所,北京 100192)
遥感卫星滚动式动态任务规划技术
刘晓丽1,杨 斌2,高朝晖1,何川东2
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081; 2.北京市遥感信息研究所,北京 100192)
面对应急任务常态化趋势,通过分析卫星任务管控系统快速响应需求,提出了滚动式动态任务规划技术方法,研究了动态任务规划问题的求解过程,分析了动态任务规划滚动时间窗口选取策略、前瞻式任务与资源处理策略和星上资源连续使用原则等。该方法在遥感卫星任务管控系统中的工程化应用将能够大大提升系统应急任务快速响应时效性,降低任务动态调整复杂度,规避星上任务频繁调整风险。该方法将为面向任务快速响应的新一代任务管控系统建设奠定技术基础。
动态任务规划;滚动式任务规划;应急快速响应;卫星任务管控
0 引言
现有的遥感卫星任务管控系统,为配合日常值班,大多采用以天为周期批处理式的任务规划方式[1],每颗卫星一般一天进行一次任务规划,一次规划安排24 h内的观测任务[2]。虽然在解决资源冲突方面比较有效,当在轨运行卫星数量较多时,任务量大幅增长,并且任务动态变化频繁,任务快速响应要求较高时,这种针对常规普查任务跨距较长的静态管控流程[3],在面对突发事件紧急调整任务时,应急任务插入可能会影响到24 h的星上任务执行,任务调整不够灵活、快捷,经常需要取消星上指令进行重新上注新指令,存在卫星安全风险,值班人员工作压力大,并且用户提交观测需求需要等待1~2天时间才能安排执行[4]。目前针对应急任务快速调整任务规划方法的研究大多是基于已有任务规划方案进行应急任务插入动态方案调整,如文献[5]基于目标无圈有向图模型,引入延迟非支配路径的概念,提出基于标记更新的成像路径搜索算法解决应急成像调度问题,文献[6]设计了一种基于自由度规则的动态启发式求解算法,文献[7]提出了综合考虑任务合成、修复和向后移位的多星动态应急调度算法。这些文献中都没有关注星上任务的应急调整,但在实际工程中,不涉及星上任务调整的应急动态调整任务规划,时间并不是很紧急,完全可以进行重新规划,对于相应任务规划区间的任务指令已经上注卫星开始执行的情况,必须要对星上指令进行取消、替换等操作。现有的应急调整模式由于要频繁调整星上任务,无法应付应急常态化任务管控。未来任务管控系统建设对系统智能化、自动化与任务快速响应能力提出了更高要求,现有面向常规普查任务的固定值班周期任务控制模式已不能满足应急常态化情况下任务快速调整的时效性要求,缩短卫星任务规划时间区间势在必行,采用面向快速响应任务的滚动式动态任务管控模式,在上层进行集中任务与资源统筹预分配基础上,在下层进行滚动式单星动态任务规划,提升各卫星任务规划的相对独立性和对应急任务的快速动态调整能力,缩短从需求受理到获取数据的时间周期,从而提高系统的快速响应能力[8]。目前已有初步的理论研究[9],但研究还不够深入,没有切合工程实践,也没有提出可直接用于工程实现的方法。
1 动态任务规划方法
动态规划是运筹学的一个分支,是求解决策过程最优的数学方法,其最终目的是确定各决策变量的取值,以使目标函数达到极大或极小。由美国数学家Bellman R E 等人在研究多阶段决策过程的优化问题时提出,他们把多阶段过程转化为一系列单阶段问题,利用各阶段之间的关系,逐个求解,解决了这类过程优化问题。动态规划的基本思想是将待求解的问题分解为若干子问题(阶段),按顺序求解子阶段,前一子问题的解,为后一子问题的求解提供了有用的信息。在求解任一子问题时,列出各种可能的局部解,通过决策保留那些有可能达到最优的局部解,丢弃其他局部解。依次解决各子问题,所有子问题解决后即解决了初始问题[10]。
动态规划是求解多阶段优化决策类问题的一种方法,是考察问题的一种途径,而不是一种算法。所以必须对具体问题进行具体分析,运用动态规划的原理和方法,建立相应的模型,然后再用动态规划方法去求解。
动态规划按照问题的时间或空间特征,把问题分为若干个阶段。将问题发展到各个阶段时所处的各种客观情况用不同的状态表示出来。每一阶段的决策仅依赖于前一阶段的状态,由决策所采取的动作使状态发生转移,成为下一阶段决策的依据。从而,一个决策序列在不断变化的状态中产生。这个决策序列产生的过程称为多阶段决策过程,如图1所示。

图1 多阶段决策过程
在多阶段决策过程中,动态规划方法是既把当前一段和未来一段分开,又把当前效益和未来效益结合起来考虑的一种最优化方法。因此,每段决策的选取是从全局来考虑的。在求整个问题的最优策略时,由于初始状态是已知的,而每段决策都是该段状态的函数,故最优策略所经过的各段状态便可逐段变换得到,从而确定了最优路线。可以把多阶段决策问题的求解过程看成一个连续的递推过程。在求解时,各状态前面的状态和决策,相对其后面的子问题,相当于初始条件,并不影响后面过程的最优策略。所以,动态规划方法解题的基本思路,是将一个多阶段决策问题转化为依次求解多个单阶段的决策问题,从而简化计算过程。
2 动态任务规划在遥感卫星任务规划中的应用
2.1 遥感卫星滚动式动态任务规划
遥感卫星动态任务规划即将原来以天为单位的长周期任务规划问题划分为若干个子阶段的任务规划过程,选择一天可用的多个业务测控时机,以测控时间周期进行划分,进行多次任务规划,每个阶段任务规划称为一个子任务规划。
相对于常规任务分时段、分批次的到达模式,应急常态化下的卫星观测任务以动态方式不断到达系统。为满足任务的时效性需求,系统需要通过多次规划完成所有任务的规划。针对应急任务具有动态变化性和快速保障的特点,可以采用基于滚动优化策略的动态规划方法。该方法以滚动推进的形式选择任务进行规划,可及时调整任务规划方案以适应和跟踪系统状态的变化,因此能够有效应对任务动态到达对系统负载的影响。
现有常规任务规划方式一般按天进行一批次任务规划,在一次任务规划过程中首动作安排固存清除,从头开始记录任务,任务规划周期内将所有安排的观测任务全部安排数据下传,卫星姿态复位,一次任务规划与下一次任务规划之间相对独立。
动态任务规划与现有常规任务规划方式主要区别不仅在于规划周期缩短,关键在于单次任务规划区间内星上存储与平台姿态等没有复位,因此各次任务规划之间并不是独立的,本次任务规划与前一次、后一次任务规划之间存在星地资源使用的关联关系,即前一次任务规划结束后的星地资源使用状态会影响后一次任务规划的决策。但每一轮任务规划过程中采用的优化搜索算法、优化策略以及各星的约束处理功能等,与原先的任务规划没有太大不同,仍然可以采用原先的方法,也可根据需要进行调整[8]。
2.2 滚动式动态任务规划定义
定义状态空间Φ:
Φ=(T,M,E,A),
式中,T为已安排观测但未安排回放任务集;M为固存占用容量;F为固存已占用未回放文件号;E为上一轮规划结束星上剩余能源;A为上一轮规划结束卫星停留姿态角度、数传天线角度等。
基于状态空间的定义,一次完整的任务规划的状态可表示为:
Φ=Φ1∪Φ2∪…Φn。


则n+1轮任务规划的初始状态为第n轮任务规划的完成状态,即


(1)
设Q为Φ中包含的任务集(初始状态为待安排任务集,完成状态为已安排任务集),即

一次完整的任务规划最终安排任务为:

相邻2轮任务规划之间必须满足以下约束:
Φn+1(t)-Φn(t)>p,
(2)
式中,p为相邻2次载荷动作时间间隔,即前一次任务规划最后一个动作结束时间与下一轮任务规划首动作时间间隔必须满足载荷动作时间间隔约束(不同的动作类型,间隔时间有所不同)。该约束也适用于每轮任务规划内任意相邻2个动作。
2.3 滚动式动态任务规划的求解过程
动态任务规划[9]的求解过程为多轮任务规划之间状态的转移[10],而每一轮任务规划子问题的求解仍然采用原先的各类智能任务规划算法与各卫星的约束处理实现,如遗传算法[11-12]、粒子群算法[13]和蚁群算法[14]等。状态转移就是根据上一阶段的状态进行决策来导出本阶段的状态。
相邻2轮任务规划之间要满足式(2)的载荷动作间隔约束。n轮任务规划中固存容量、星上能源和平台姿态的使用是连续的,即满足式(1)的约束,即单轮任务规划并不一定要保证数据平衡、能源平衡与资源平衡,但在卫星整体任务规划中要保证数据平衡、能源平衡与姿态平衡[15]。
状态Φn到Φn+1的转换方法:以Φn中的固存容量、星上能量和平台姿态等作为Φn+1任务规划的初始状态开始新一轮任务规划,通过在Φn中获取未回放的所有任务Tn,在Φn+1中进行数传任务与接收资源安排,并且数传任务中安排回放的固存文件号必须包含Φn中已记录的固存文件号,每一轮任务规划过程中都需要在初始的固存容量、星上能源和平台姿态状态基础上进行载荷与平台使用约束的检验。n+1轮任务规划完成后的状态作为n+2轮任务规划的初始状态,以此类推,通过多轮滚动式任务规划状态的转移,实现整体连续的任务规划,即为滚动式动态任务规划[8],如图2所示。

图2 动态规划流程
对于一次滚动式动态任务规划,可以采用各类启发式优化搜索算法进行求解,与传统的任务规划算法没有太大区别,本文不再介绍。只是优化评价函数需要根据动态任务规划特点进行调整。
目前常用的任务规划算法优化评价函数一般采用所有任务各因素加权求和的方式[11,16],表达式为:
式中,rt为任务安排比率,对于点目标任务该值为1,对于区域目标任务则为多个元任务对目标的整体覆盖率;pe为各因素对目标函数的贡献值;we为各因素权重。
该目标函数的优点是:可通过调整各目标因素的收益权重来实现用户不同的规划策略要求[13]。针对动态任务规划特点,将优化评价函数调整如下:

3 滚动式动态任务规划策略设计
3.1 滚动时间窗口选取策略
滚动优化策略的基本思想是将任务按照到达顺序划分为具有一定交叠,但随着规划时刻不断向前推进的任务集合,称为滚动窗口。在每次规划时,仅对当前滚动窗口内的任务进行规划,随着规划时间窗口的推进,新任务被不断加入,而完成规划的任务退出任务队列,从而实现滚动窗口的更新。滚动优化策略的优点是能够将复杂的动态规划问题分解为多个简单的静态规划子问题,并以子问题优化解的组合代替原问题的最优解,从而降低原问题求解的难度,并及时纳入应急任务,缩短从任务提交到安排执行之间的等待时间。
滚动优化策略的一个关键因素是如何确定滚动窗口。滚动窗口用于存储参与当前规划的任务与接收资源[10]。
卫星任务规划由于受固存和回放资源的限制,导致观测任务序列数量不可能无限膨胀,在2次回放动作之间的目标数量和观测时长受固存和回放资源的限制,所以,以回放时刻划分滚动窗口相对比较合理。目前,对于高分辨率卫星,由于一次成像图像数据量很大,需要频繁回放,且基于固存的随机回放能力与任务对接收站与接收时效性的要求,观测任务可能会跨区间回放,另外,由于回放时间区间与测控时间区间不匹配,生成的指令无法及时上注。因此按照回放时间区间进行任务规划在目前是不可行的。若将来每个地面站都具备测控上行能力也同时具备数据接收能力,则可以按照回放时间区间进行滚动时间窗口的划分。
任务的最终执行完成,必须有业务测控时段进行遥控指令上注卫星执行。可以通过缩短测控时间间隔,提高有效载荷控制指令上注频率,在紧急情况下,还可临时申请应急测控资源,从而提高卫星任务快速反应和精细化管理能力,因此,采用测控时间区间作为滚动式任务规划时间区间针对当前地面站使用现状来说是合理可行的。
以测控时间段为任务规划区间虽然可以提高卫星对应急任务的保障能力,但是,由于受卫星测控资源的限制,目前卫星2次测控时间间隔一般在小时级,随着动态任务下达的随机性提高,不可预知未来观测任务的分布情况;同时,由于卫星受固存与回放资源的限制,如果任务规划时完全不考虑后续回放资源,有可能出现前面规划的观测任务无法进行数据下传,或者前面规划的任务太多导致后面无法安排其他任务。所以,为了避免上述情况,每次任务规划时必须考虑回放资源,即卫星任务规划的任务滚动窗口为测控时间间隔,而资源滚动窗口可能大于测控时间窗口。理想情况,若接收站都具有测控上行能力,则测控时间窗口与回放窗口一致,在上注下一圈任务指令的同时,完成上一圈任务的接收。按测控时间将单次任务规划细分为多次连续任务规划,并上注有效载荷控制指令,即为基于测控周期的滚动式任务规划。
任务规划工作时机选择确定:从当前时间之后,查找该卫星最早可用的测控时段,在该测控时段之前预留任务管控工作时间与测控注入准备时间,为总的测控准备时间,测控时段开始时间前推准备时长的时间点,在该时刻之前,不再受理任务,即为本次滚动式任务规划的工作时间上限T0,开始进行任务规划,即为任务规划工作时机。
滚动式任务规划时间窗口的选择确定:最近的测控时段结束时刻,向后预留任务执行前置时间长度(姿态机动时间、指令执行延时、与上次动作间隔时间等),到下一个可用的测控时段结束时刻,即为一次滚动式任务规划的任务滚动时间窗口[T1+Δt,T2],T1为最近一个测控窗口的结束时间,T2为下一个测控窗口的结束时间,如图3所示。
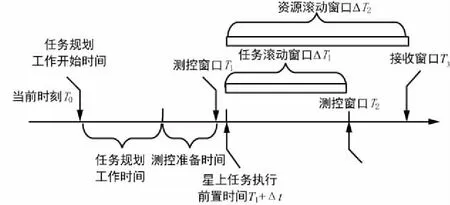
图3 滚动时间窗口选取示意
而任务规划需要考虑本次任务区间未回放任务在最近一个回放窗口能否完全回放,因此任务规划的资源滚动时间窗口[T1,T3],T3为与任务滚动时间窗口结束时间最近的接收窗口开始时间。需要说明的是,多次滚动任务规划之间任务滚动窗口是连续的,而资源滚动窗口是交叠的,因为上次滚动窗口内未回放的任务需要与本次滚动窗口的任务一起进行数据回放。若地面站在测控的同时可以进行数据接收,则任务滚动时间窗口与资源滚动时间窗口一致。
3.2 前瞻式任务与资源处理策略
若本轮任务规划结束前有任务无可回放资源时,尝试前瞻获取下一轮最近可用的接收资源,并统筹考虑下一轮同一回放时间段内已下达的任务进行任务安排,若无下达任务时,根据时间长度与任务间隔时间进行任务预估,生成的方案中去掉时间超出本轮规划区间的内容,这样可以保证本轮未回放的任务在下一轮中有足够接收资源安排回放,又可以不影响下一轮重要任务的回放,尽量使最终解趋近全局最优。即全局考虑任务规划方案的优化性,本轮任务规划时前瞻式考虑下一轮任务规划中可用的接收资源与同一资源回放时段内的已下达任务情况,单轮任务规划按照资源滚动时间窗口考虑任务与资源的安排,最终任务规划结果按照测控时间窗口生成[17]。
3.3 星上资源连续使用原则
每轮滚动式任务规划之后,需要记录星上固存使用情况与未回放任务,包括固存已使用容量,固存记录文件号,每个文件号对应的任务信息以及容量,还需要记录星上能量与卫星姿态角度等会对后续任务规划产生影响的星上资源状态,每轮滚动式任务规划时,需要提取前一轮任务规划结束记录的星上资源状态,作为本轮规划的初始输入。更进一步,星上状态在每个载荷动作后都进行记录,这样从任意动作之后都可以开始新一轮任务规划。
4 结束语
本文提出的滚动式动态任务规划技术方法面向突发事件的遥感卫星动态管控新模式[18],将动态规划方法应用到卫星任务规划,基于测控周期将常规一天的任务规划分解为多轮动态任务规划过程,突发应急任务能够及时在最近的滚动时间窗口中进行快速安排,并基于前瞻式任务与资源处理策略使整体任务规划过程趋于最优。本文方法在提升任务规划时效性的同时兼顾优化性,与现有的应急任务动态调整任务规划技术相结合,能够满足面向任务快速响应的遥感卫星任务管控新要求。通过原型系统进行试验验证,本文方法能够解决现有系统面临的应急快速响应迫切需求,将为建设高效的新型智能任务管控系统[19]奠定技术基础。
[1] 张学庆,马万权,高朝晖,等.卫星管理控制体系结构研究[J].无线电工程,2006,36(5):36-61
[2] 王士成.卫星运行控制系统混合模式架构研究[J].无线电工程,2013,43(3):1-3,23.
[3] 陈磊勇,陈英武,贺仁杰,等.多观测卫星任务调度系统的设计与实现[J].计算机工程与设计,2018,29(8):2 089-2 092.
[4] 刘洋,谭跃进.一种有新任务到达的多卫星动态调度模型与方法[J].系统工程理论与实践,2005(4):35-41.
[5] 王钧 ,李军,陈慧中,等.一种应急条件对地观测卫星成像调度方法[J].电子学报,2008,36(9):1 715-1 722.
[6] 王军民,李菊芳,谭跃进.有新任务插入的多星动态调度模型与算法研究[J].系统仿真学报,2009,21(12):3 522-3 527.
[7] 王建江,朱晓敏,吴朝波,等.面向应急条件的多星动态调度方法[J].航空学报,2013,34(5):1 151-1 164.
[8] 贺川,邱涤珊,朱晓敏,等.基于滚动优化策略的成像侦察卫星应急调度方法[J].系统工程理论与实践,2013,33(10):2 685-2 694.
[9] 赵娟,樊超.动态规划方法的应用研究[J].计算机时代,2014(2):28-30.
[10] 张利宁,祝江汉,李皓平.多维动态规划在对地观测卫星调度中的应用[J].计算机仿真,2007,24(5):25-29.
[11] 高朝晖,岳群彬,李伟.遗传算法在成像卫星计划编制中的应用[J].无线电工程,2013,43(12):37-40,60.
[12] 徐雪飞,李建华,沈迪,等.基于量子遗传算法的航空通信频率动态分配[J].电讯技术,2015,55(12):1 311-1 317.
[13] 韩伟,张学庆.一种基于离散粒子群的多星任务规划算法[J].无线电工程,2015,45(1):1-4.
[14] 黄双临,马冬青,方冬梅,等.基于改进蚁群算法的卫星数传调度[J].无线电工程,2015,45(7):27-30.
[15] 阳书昭,贺仁杰,邢立宁.基于可配置规则的敏捷卫星任务规划问题研究[J].科学技术与工程,2015,15(28):209-216.
[16] 国晓博,刘金灿,周红彬.分布式卫星系统数传调度研究[J].无线电通信技术,2016,42(4):29-32.
[17] 孙凯,白国庆,陈英武,等.面向动作序列的敏捷卫星任务规划问题[J].国防科技大学学报,2012,34(6):141-147.
[18] 王鹏,刘晓东,郭建恩,等.面向突发事件的遥感卫星动态管控模式[J].无线电工程,2015,45(11):60-63.
[19] 张吉祥,郭建恩.智能对地观测卫星初步设计与关键技术分析[J].无线电工程,2016,46(2):1-5.
Research on Rolling Dynamic Mission Scheduling Technique for Remote Sensing Satellites
LIU Xiao-li1,YANG Bin2,GAO Zhao-hui1,HE Chuan-dong2
(1.The54thResearchInstituteofCETC,ShijiazhuangHebei050081,China; 2.BeijingRemoteSensingInformationInstitute,Beijing100192,China)
Considering the trend of fast response to user’s dynamic missions,through the analysis of construction requirements of the mission management and control system for fast emergency response,the technique of rolling dynamic mission scheduling is presented.This technique will improve the timeliness of emergency mission response and avoid risk of altering the task injected into the satellite,and lay a foundation for developing a new generation mission management and control system.
dynamic mission scheduling;rolling mission scheduling;fast emergency response;satellite mission management and control
10.3969/j.issn.1003-3106.2017.09.14
刘晓丽,杨斌,高朝晖,等.遥感卫星滚动式动态任务规划技术[J].无线电工程,2017,47(9):68-72.[LIU Xiaoli,YANG Bin,GAO Zhaohui,et al.Research on Rolling Dynamic Mission Scheduling Technique for Remote Sensing Satellites[J].Radio Engineering,2017,47(9):68-72.]
TP391
A
1003-3106(2017)09-0068-05
2017-02-21
中国博士后科学基金资助项目(2015M580217)。
刘晓丽 女,(1976—),高级工程师。主要研究方向:智能信息处理、航天任务管控。
杨 斌 男,(1977—),高级工程师。主要研究方向:航天任务管控。
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
军民两用技术与产品(2021年10期)2021-11-25
中国船检(2020年11期)2020-11-27
环球慈善(2019年6期)2019-09-25
科学家(2019年3期)2019-08-18
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
科学与财富(2016年28期)2016-10-14
