
一种基于TC-OFDM系统的室内定位算法
2017-08-16 08:21张正舵陈远知
无线电工程 2017年9期
张正舵,陈远知
(中国传媒大学 广播电视数字化工程中心,北京 100024)
一种基于TC-OFDM系统的室内定位算法
张正舵,陈远知
(中国传媒大学 广播电视数字化工程中心,北京 100024)
为了保证火灾时人们安全有序撤离及方便消防救援工作,对室内定位技术在消防救援中的应用进行了研究,提出一种基于TC-OFDM(Time & Code Division-Orthogonal Frequency Division Multiplexing)系统的室内定位新算法。该算法根据接收定位基点数目的不同采取不同处理流程,可以满足应用对鲁棒性要求。算法通过气压测高获得高度数据,实现了室内三维空间定位。为了提高定位稳定性,算法增加了加权滑动平均滤波后处理。使用TC-OFDM实验测试系统对新算法进行了性能测式,水平定位误差约为3 m,垂直定位误差为0.5 m。
TC-OFDM系统;测距定位;气压测高;加权滑动平均滤波
0 引言
室内定位研究始于20世纪90年代,Active Badge[1]被认为是第一个室内定位原型系统。1996年随着FCC颁布E-91法令[2],要求移动通信网络提供定位功能,全球兴起室内定位研究热潮,Cricket[3]、RADAR[4]、IPAQ[5]、Active Office[6]、LANDMARC[7]、INEMO[8]和TC-OFDM[9]等各种室内定位系统如雨后春笋不断涌现。经过20多年的发展,室内定位技术研究日趋成熟,开始走向工程应用阶段。
随着智慧城市[10]的快速发展,人们在大型建筑物内停留、活动的时间越来越长。火灾时建筑物内人群的撤离和消防救援,成为影响社会安全的重要问题,室内定位有助于解决这一问题。
室内定位系统可以分为广域室内定位和局域室内定位两大类[11]。广域室内定位由广域网(如移动通信网、广播电视网)承载,可实现全局区域覆盖。其优点是覆盖范围大,易于形成标准应用产品和统一规范服务;缺点是需改造基站与终端设备,建设规模大、周期长且成本高。局域室内定位由局域网(如无线局域网(WLAN))承载,只能实现局部区域覆盖。其优点是建设规模小、周期短、成本低;缺点是覆盖区域小,不易形成统一规范的产品与服务。面向火灾应用的室内定位系统,适宜采用广域类别。
TC-OFDM系统是由北邮邓中亮教授团队牵头研发的基于移动通信网的广域室内外定位系统,本文主要研究的是基于该系统广域室内节点网络的终端定位解算算法,采用优化处理的室内二维重心定位方法和差分测高技术,最终得到适于该系统应用、定位性能优良的终端三维定位算法。
1 系统定位原理
TC-OFDM系统由通导融合基站、室内信号增补节点和定位终端组成,其中通导融合基站和信号增补节点为定位基点。通导融合基站架设在室外,发射融合通信与定位信号的TC-OFDM信号;信号增补节点布设在楼内各区域房顶,向终端转发通导融合信号;定位终端由用户携带,接收定位基点发射的TC-OFDM信号,并完成定位处理,实现室内外无缝衔接定位功能。
TC-OFDM系统支持基于到达时间差(TDOA)的高精度定位方案和基于接收信号强度指示(RSSI)的普通精度定位方案。基于RSSI信息又有三边测量法[12]和最大似然估计法[13]等,考虑到应用要求和终端硬件平台性能,本文选择基于RSSI[14]测距方案实现室内定位。
无线电波在室内空间传播模型[15]为:

(1)
式中,P为定位终端处场强;d为发射节点与定位终端间距离;n为路径损耗指数(取值与环境有关,一般办公室和楼道走廊取值大小为1.4~2.5[16]);d0为参考距离(一般选取1 m);P0为d0处场强;δ为测距时引入的噪声(不考虑多径传播和非视距误差情况,可视为均值为0的高斯噪声)。
依据文献[17-18],可以用接收信号强度RSSI代替场强值P,式(1)变为:

(2)
取参考距离d0=1,式(2)变为:
RSSI=RSSI0+10nlg(d)+δ。
(3)
TC-OFDM系统的定位基点周期性广播包含自身相关信息的信号,定位终端通过对该信号降频、捕获和跟踪等处理之后,整合出的电文帧结构[19]如图1所示。电文帧中包括定位终端处的信号RSSI值,基点标识符、经纬度坐标、气压、温度和高度等数据。
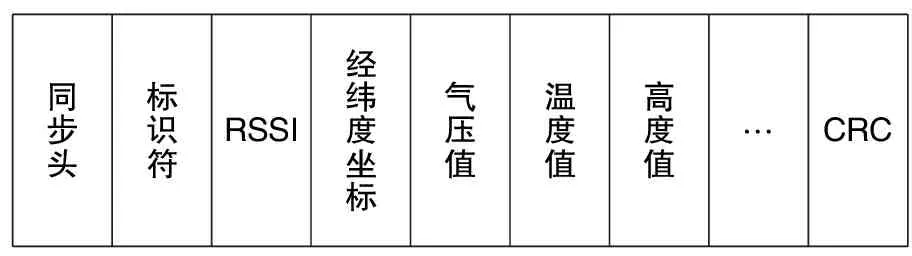
同步头标识符RSSI经纬度坐标气压值温度值高度值…CRC
图1 TC-OFDM帧结构
接收到基点信号后,定位终端可从TC-OFDM帧中解出定位终端处RSSI值和基点坐标数据,如果同时知道离基点距离d0位置处的RSSI0值,忽略噪声影响,就能通过式(3)计算出定位终端与定位基点之间的距离d。
通常定位终端可以同时接收到多个定位基点的广播电文,从接收电文解算出基点坐标、参考距离信号强度,再结合定位终端采集的各基点信号强度,就可以采用三边法、质心法或加权质心法等常见定位算法[14]进行终端位置解算,实现二维空间定位功能。
2 重心定位算法
与技术探索不同,工程应用算法不仅需要追求较高的定位精度指标,而且还要满足与工程应用相关的诸多约束条件。对于火灾应用场景,定位算法需要满足的约束条件包括:
① 收到的定位基点信号少于3个时仍能进行位置解算;
② 能适应符合通信要求的基点部署密度;
③ 能适应主流终端硬件平台性能条件;
④ 能够得到较准确的高度信息和终端周边环境信息。
为了在满足上述约束条件下获得较高的定位精度,提出适应火灾场景工程应用的重心定位算法。算法具体描述如下:
当只接收到1个室内基点时,可以认为定位终端处于该基点正下方附近。这是由于定位终端距其他基点过远,信号强度过弱,因此无法捕获到其他基点信号,而只捕获到离自己最近的信号,即单基点情况下该基点坐标为定位终端位置坐标。

根据式(3)有

(4)

(5)
如前所述,假定定位终端位于两基点连线上,依据其几何关系,有
(6)
(7)
由式(4)~式(7)可以推导出

(8)

(9)
式中,ΔRSSIi=RSSIi,0-RSSIi(i=1,2)。

当接收到3个或3个以上基点信号时,认为定位终端处于所有两两基点组合情况下的定位点为垂足、基点连线的垂线相交坐标点的重心坐标位置。与接收到2个基点信号情况时接收终端所在位置类似,当任取2个基点A、B来计算,则定位终端的位置必在以定位点为垂足的A、B基点连线的垂线上。同理,当接收到多个基点信号时,定位终端的实际位置就会趋近于所有两两基点组合情况下的定位点为垂足、基点连线的垂线相交坐标点的重心坐标位置。
定位分以下4步进行:
① 对接收到的所有基点信号两两组合,按照两基点定位方法求得各组合定位坐标;
② 在求取的两基点定位坐标处,做垂直于相应基点连线的直线,获得所有垂线两两交点(剔除距离基点位置较远的垂线交点);
③ 设置门限值,剔除距离任意基点位置较远的垂线交点;
④ 求取所有垂线坐标点的重心坐标位置,即为定位终端定位坐标。
以接收到3个基点信号为例,说明多基点重心定位处理过程。如图2所示,假设定位终端接收到A、B和C基点信号,两两组合求得两基点重心分别为P1、P2和P3,3个基点两两连线的垂线交点分别为a、b和c,所形成的三角形重心G即为终端位置。

图2 三基点几何重心定位示意
上述定位算法只能获得平面二维坐标数据,而楼层高度在发生火灾时规划撤离路线与确定救援位置具有重要作用。为此,定位终端使用气压测高方法获取楼层高度数据,实现三维空间定位。
气压与海拔高度关系模型[20]为:
(10)
式中,h和p为终端的高度和气压;h0和p0为基站的高度和气压;t和t0分别为终端和基站处温度值。
已知利用压力传感器获取所处环境中的气压值,然后大气压与海拔高度的函数关系可以求得对应的高度值。式(10)中,h0、p0和t0分别认为是基准点高度、基准点气压和基准点温度,并可从基站广播电文中解出,p和t可以由终端集成的综合传感器测量。这样,就可以通过式(10)解算出终端高度h,实现三维定位。
3 平滑后处理
由于定位终端1 s内最多可以接收同一室内基点发送的多达20组电文信息。依据定位终端每次解算时收到的基点个数,对短时间内所有定位结果进行加权滑动平均滤波处理,可以消除定位误差波动,提高定位的稳定性。
滑动平均滤波法又称为递推平均滤波法。对于一个离散系统,取N个连续采样值组成一个固定长度队列,每次输入一个新样本进入队尾,同时推出队首的一个样本(先进先出原则);每次取当前队列的N个样本计算平均值,作为滤波器输出。该方法平滑度高,对周期性干扰有良好的抑制效果。

(11)

(12)
4 实验测试与分析
采用北京邮电大学和北斗羲和公司开发的室内增补节点和定位终端,在50m*15m的楼层内搭建实验测试平台。在设定区域楼层内共布设6个室内节点,节点均匀分布,用于发射TC-OFDM信号并广播导航电文。
从图3中可以看出,60组解算坐标点大部分分布在以实际位置点为圆心、半径为3m的圆周两侧,符合预期定位效果。
传统加权质心定位算法在室内节点极多、室内小空间和无障碍物隔挡等环境条件下精度更高[21];但TC-OFDM方案主要应用于室内广域空间,覆盖面积更大,采用的是特定的几何交点重心算法,需要考虑障碍物和隔墙等的影响,并且选用较少的室内节点个数来达到较高的室内定位精度,在室内广域空间应用上优势明显。

图3 实际位置与解算位置分布
为了分析定位的稳定性和可靠性,在室内任意已知坐标点连续进行200次定位解算,并对结果进行加权平滑滤波后处理,可以得到后处理情况定位数据序列。然后通过式(13)计算定位误差序列,绘制定位误差曲线,结果如图4所示。

(13)
图4曲线分别为无平滑处理定位误差曲线和 20阶加权滑动平均滤波处理定位误差曲线。由图4可以看出,在几乎没有定位结果损失的情况下,定位误差在3 m以内,误差波动比未平滑后处理情况有明显改善,毛刺减少,稳定性提高,更有利于导航和航迹推算。

图4 定位误差对比曲线
由于室内火场环境温度复杂多变,气压测高实验在室内仿真环境中进行。在同一楼层内,通过定位终端多次测量,总是从已测量到的若干室内温度值中选取最低的温度值tmin和相应气压值Pmin带入式(10),来解算定位终端所在高度h。进行100次气压、温度数据采集实验,解算高度数据,结果如图5所示。测量高度误差都在0.5m以内,满足火场场景应用要求。

图5 高度测量曲线
5 结束语
在火灾场景应用TC-OFDM广域室内定位系统,要求定位算法不仅有较高的定位精度,还需要适应使用中面临的各种现场情况。本文提出几何重心定位算法,可根据接收定位基点数目不同采用不同的定位处理流程,保证了实际应用中算法的鲁棒性。为了获得更加稳定的定位结果,算法增加了对空间几何解算定位结果的加权平滑后处理。同时,算法结合气压测高方法,使用综合传感器测量定位点温度和气压等环境数据,根据气压与高度关系模型计算定位点高度数据,实现了室内三维空间定位。实验测试结果表明,在数百平米楼宇内,算法水平定位误差在3m以内,垂直误差为0.5m,并且具有良好的鲁棒性,满足火灾场景工程应用需要。
[1]WANTR,HOPPERA,FALCAOV,eta1.TheActiveBadgeLocationSystem[J].ACMTransactionsonInformationSystems,1992,10(1):91-102.
[2]FCCDocketNo.94-102.RevisionoftheCommissionRulestoInsureCompatibilitywithEnhanced91lEmergencyCallingSystems[Z].FederalCommunicationsCommissionTech.Rep.RaM-8 143,1996.
[3]PRIYANTHANB,CHAKRABORTYA,BALAKRISHNANH.TheCricketLocation-supportSystem[C]∥InProceedingsofMobiCom2000,Boston:ACM,2000:32-43.
[4]BAHLP,PADMANABHANVN.RADAR:AnIn-buildingRF-basedUserLocationandTrackingSystem[C]∥InProceedingsoftheIEEEINFOCOM,2000:775-784.
[5]CASTROP,CHIUP,KREMENEKT,etal.AProbabilisticRoomLocationServiceforWirelessNetworkedEnvironments[J].ComputerScience,2001,2201:18-34.
[6]SAVVIDESA,HANC,STRIVASTAVAM.DynamicFine-GrainedLocalizationinAd-HocNetworksofSensors[C]∥InProceedingsofthe7thAnnualInternationalConferenceonMobileComputingandNetworking,NewYork:ACM,2001:166-179.
[7]NILM,LIUYunhao,LAUYC,etal.LANDMARC:IndoorLocationSensingUsingActiveRFID[C]∥ProceedingsoftheFirstIEEEInternationalConference,2003:407-415.
[8]LIH,SHENX,ZHAOJ,etal.INEMO:DistributedRF-basedIndoorLocationDeterminationwithConfidenceIndicator[C]∥EURASIPJournalonAdvancesinSignalProcessing,2008:80-85.
[9]DENGZhongliang,YUYanpei,YUANXie,etal.SituationandDevelopmentTendencyofIndoorPositioning[J].ChinaCommunications,2013,10(3):42-55.
[10] 乔宏章,付长军.“智慧城市”发展现状与思考[J].无线电通信技术,2014,40(6):1-5.
[11] 庞贝,刘斌,邓中亮.攻克广域室内外无缝定位难题[J].科技创新与品牌,2012(12):40-41.
[12] 李双明,武庆威.采用RSSI提高无线传感网络定位精度的算法[J].无线电工程,2015,45(2):8-10.
[13] 常亚兵.基于RSSI测距的室内定位算法研究[D].上海:东华大学,2015:17-19.
[14] 杨逊豪,何加铭,董义旺,等.基于无线传感器网络时间同步MAC协议研究[J].无线电通信技术,2012,38(6):15-19.
[15] 梁尧.WLAN室内定位系统中无线信号传播的统计建模与应用[D].哈尔滨:哈尔滨工业大学,2009:31-33.
[16] 朱明辉,张会清.基于RSSI的室内测距模型的研究[J].传感器与微系统,2010,29(8):19-22.
[17] 邓中亮,余彦培,袁协,等.一种生成定位信息的方法、装置和导航电文[P].中国专:201110086258.4,2011.
[18] 袁晓峰,陈颀.一种基于RFID的定位方法[J].无线电通信技术,2016,42(6):81-85.
[19] 韩文君.基于RSSI的室内节点定位方法的研究与实现[D].长沙:湖南大学,2015:15-20.
[20] 邓中亮,余彦培,徐连明,等.室内外无线定位与导航[M].北京:北京邮电大学出版社,2013:42-43.
[21] 李延.基于RSSI测距的室内定位技术研究[D].长沙:中南林业科技大学,2015:46-52.
A New Indoor Positioning Algorithm Based on TC-OFDM System
ZHANG Zheng-duo,CHEN Yuan-zhi
(EngineeringCenterofDigitalAudioandVideo,CommunicationUniversityofChina,Beijing100024,China)
In order to ensure the safe and orderly evacuation and fire rescue work,the application of indoor positioning technology in fire rescue is studied,and a new indoor positioning algorithm based on TC-OFDM system is proposed in this paper.According to different number of available beacons,a different processing procedure is applied to improve robustness of engineering algorithm.The algorithm obtains the height data through the barometric altimetry technique,realizing three dimensional indoor positioning.For more stable positioning data,a weighted moving average filter is used for post-processing of calculation result of position value.On a TC-OFDM experiment platform,the algorithm has been evaluated with about 3 m horizontal positioning error and 0.5 m vertical error.
TC-OFDM system;ranging location;barometric altimetry;weighted moving average filter
10.3969/j.issn.1003-3106.2017.09.11
张正舵,陈远知.一种基于TC-OFDM系统的室内定位算法[J].无线电工程,2017,47(9):55-59.[ZHANG Zhengduo,CHEN Yuanzhi.A New Indoor Positioning Algorithm Based on TC-OFDM System[J].Radio Engineering,2017,47(9):55-59.]
TN965.5
A
1003-3106(2017)09-0055-05
2017-04-07
国家高技术研究发展计划(“863”计划) 基金资助项目(2015AA124101)。
张正舵 男,(1989—),硕士研究生。主要研究方向:室内定位、嵌入式技术。
陈远知 男,(1966—),教授,博士生导师。主要研究方向:信号处理技术。
猜你喜欢
幼儿画刊(2021年5期)2021-12-02
矿产勘查(2021年3期)2021-07-20
军民两用技术与产品(2021年10期)2021-03-16
装备制造技术(2020年12期)2020-05-22
模具制造(2019年4期)2019-06-24
中国交通信息化(2018年12期)2018-03-21
浙江大学学报(工学版)(2015年7期)2015-03-01
航天返回与遥感(2014年1期)2014-07-31
