
组合导航技术在出租车计价系统中的应用
2017-08-11 10:43:49马永健刘松林王同合徐亚丽李荣攀
测绘通报 2017年7期
马永健,刘松林,王同合,徐亚丽,李荣攀
(信息工程大学,河南 郑州 450001)
组合导航技术在出租车计价系统中的应用
马永健,刘松林,王同合,徐亚丽,李荣攀
(信息工程大学,河南 郑州 450001)
针对目前出租车计价器在计时和计程方面存在的问题,提出了利用GNSS+INS+Odometer组合导航技术进行出租车计价的方法。运用组合导航技术对出租车载客过程中里程和时间进行计算,一方面可以避免传统计价器在使用过程中由于计价器本身以及人为因素等原因,改变实际的行驶里程,影响计价的准确性,从而提高计价的准确性;另一方面,可以避免单一的里程计计价过程中一旦出现故障,里程结果出现较大误差或无法计价等情况,增加出租车计价系统的可靠性。通过跑车试验证明:将组合导航技术应用于出租车计价系统中,能够对出租车计程、计时以及低速计价等关键问题作出很大改进,在计价的精度和可靠性方面都有显著提高;避免因计价器不准等原因造成的乘客、出租车司机之间的矛盾,维护双方的合法权益;对组合导航技术的发展起到了很好的推动作用。
组合导航;里程计;计价原理;里程误差率
随着我国出租车行业的快速发展,出租车已经成为我国城市公共交通的重要组成部分和现代化城市必备的基础设施,是人们工作、生活中必不可少的交通工具。出租车计价器是出租车的经营者和乘坐汽车的消费者之间用于公平交易结算的工具,是一种能根据乘客乘坐汽车的行驶距离和等候时间进行计价,并直接显示乘客粗要支付车费的计量器具。出租车服务行业和出租车计价器紧密相关,因而计价器计价准确与否,直接关系到经营者与消费者的经济利益[1]。
全球卫星导航系统(global navigation satellite system,GNSS)能够迅速、准确、全天候地提供导航定位信息,在车辆定位与导航中应用日趋广泛,但是由于卫星定位容易受到外界环境的干扰,尤其是在高楼林立的城市,或者车辆通过隧道及立交桥时,卫星信号会变得很差甚至中断而无法定位。惯性导航系统(inertial navigation system,INS)是一种完全自主的导航系统,在短时间内有很高的定位精度。它具有不受外界电磁干扰、高数据率、姿态信息等优点,但是由于惯性器件误差的影响,其定位精度随时间的增长而急剧恶化,因此无法长时间单独工作。高性能的惯性器件大大提高了INS的定位精度,但是高昂的价格增加了使用成本,也限制和阻碍了INS的发展[2]。
组合导航是采用两种或两种以上导航系统,形成性能更高、安全性和可靠性更强的导航方式。目前世界上最广泛、性能最优、自主性最强的组合导航为卫星导航系统和惯性导航系统组合,该组合导航系统将卫星定位技术与惯性导航技术组合起来,可以优势互补、取长补短[3]。本文采用的组合导航技术是北斗+GPS+INS组合导航系统。
1 出租车计价原理
1.1 出租车计价器的组成
出租汽车计价器主要由微处理器、时钟、存储器、里程传感器、显示屏、功能按键、空车牌、税控器件、打印机以及GPS摄像头、城市一卡通接口等组成。其中,微处理器是计价器的核心,控制各个部件的协调和完成数据的处理;时钟用于显示计价器正常运营时间和等候时间,与北京时间同步,误差不超过±10 s/d;存储器实现运营数据的存储,且不得少于100次;里程传感器能将里程信号转换成计价器可识别的脉冲信号;显示屏能够显示运营里程、单价、计时和金额等;功能按键能够实现调时、暂停、单程等功能;空车牌能够实现重车和空车状态的转换;税控器件能够满足国家要求,实现税控功能;打印机能够打印本次运营的上下车时间、金额、车牌信息等;GPS、摄像头、城市一卡通接口作为信息社会发展的产物,逐渐得到了应用,能够到达GPS定位、实时监控、刷卡服务等功能[4]。
1.2 计价器工作原理
出租车计价器是一种集计程、计时和车速等多种计量功能与一体的智能化计量仪器,它安装在出租汽车上,通过连接在车辆变速箱输出齿轮的传感器传送电脉冲信号来记录车辆的营运里程,时钟单元提供实时(永久)时钟,按特定的计价收费模式连续累加并直接指示出行程中任一时刻乘客应付费用的总数,其金额值是计程和计时时间函数[5]。
出租车计价器有两种不同的计价方式:一种叫作时距并计式,是指重车时等候时间和里程同时收费;另一种叫作时距分离式,是指重车时等候时间和里程分开收费。世界上大多数国家采用时距并计式。在时距并计式收费方式下,切换速度是计价器从计程收费转换为时距并计收费的车速切换点,通常切换速度为12 km/h,因此出租车的速度信息也是出租车计价的重要参数。可见里程(重车时的计价里程)和时间(重车低速状态时计价的时间)以及出租车的速度信息是出租车计价器计价的主要依据。因此,出租车计程和计时的精度对出租车计价起到至关重要的作用[6]。
1.3 出租车计价器故障分析与处理
出租车计价器常见故障主要来源于计价器组成的各个方面,本文从计价器的各个组成部分入手,分析其常见故障以及对计价的影响。
1.3.1 时 钟
如果时钟出现故障,就会导致提前(延后)进行夜间价(昼间价)和计费错误。时钟偏差瞬间变大,一般是考虑为电池没电、程序混乱、线路断裂等。计价器恶劣的使用环境会使时间缓慢变化,当每月的误差不超过±300 s/30 d时,可以通过计价器的时钟自校功能每月对计价器时钟调整一次;当每月的误差超过±300 s/30 d时,必须到计价器检定部门开启铅封进行调整[7]。
在传统计价系统中,存在人为的更改系统时间。如在白天时把计价器的系统时间改为夜间,使白天运营时计价器按夜间收费或将时间提前,提前进入夜间的计费模式,这在很大程度上损害了乘客的合法权益。目前对出租车时间信息的控制,是依靠出租车司机自觉遵守,自动校正时间偏差,缺乏相关的技术和法规支持。
1.3.2 里程传感器
里程传感器能够直接影响计价器的里程。采用传统的计价器存在较多的作弊手段,从而影响传统出租车计价器的使用,常见的出租车计价器作弊方法如下。
(1) 外加脉冲信号或遥控装置:计价器主要靠传感器发出的脉冲来计算行驶里程。作弊者利用这一原理,人为地增加计价器以外的脉冲信号,使车辆计价里程大于实际行驶里程。
(2) 传感器内增加磁铁个数:传感器的磁铁个数是固定的,一般为2个,增加磁铁个数,也是通过增加脉冲信号的方法,增加收费。
(3) 更换轮胎:出租车计价器的计价里程和轮胎转数成正比,将原厂轮胎变小,这样就减小轮胎周长,车辆在等距行驶时轮胎转动圈数就会增加,使脉冲信号增加[8]。
从上述3个现象可以看出利用传统的里程计价存在诸多问题,使计算出的里程与实际行驶的里程存在较大误差,会产生因里程不准而引起的纠纷,常用的做法是有出租车检定部门对出租车进行定期检定,一般的检定周期为一年,出租车检定的程序和工作量都很大,也会存在一些问题,使出租车检定的权威性和严谨性受到挑战,因此不能从根本上解决里程计统计里程所带来的弊端[9]。
2 组合导航应用于计价器计价的关键技术
组合导航技术的快速发展,以及其在军用和民用行业的推广,使这项技术越来越多的应用到人们的日常生活当中,如智能驾考、无人驾驶、精密农业等领域,使人们的生活方式得到很大改善,也使得组合导航技术在出租车行业的应用成为必然[10]。可以利用组合导航技术提供准确、可靠的位置信息,通过计算得到出租车的实际行驶距离,为出租车计价提供准确的里程基准;在得到位置信息的同时,也获取到标准的UTC时间信息,可以得到车辆行驶的时间信息;另外也可以得到车辆行驶的速度信息,从而可以计算车辆低速或停止的时间,这些都为计价器计算最终乘客总共的消费金额提供了准确的计算基准。下面将介绍组合导航技术应用在计价器中的关键技术,包括里程、时间及速度等信息计算的原理。
2.1 计 程
组合导航技术得到的定位信息是在WGS-84坐标系下的经纬度信息,为了与实际车辆行驶的里程一致,需要将其转化到高斯平面坐标系中。坐标转化就是要将椭球体上的元素投影到平面上,实现由大地坐标(L,B)求出高斯平面坐标(x,y),此计算过程称为高斯投影正算公式[11]。由定位点的坐标(x,y),即可计算车辆不含高程的里程信息,计算公式为
将NMEA(National Marine Electronics Association)0183协议中的高程信息作为车辆的高程信息,这里将Hi记录为相应点号的zi,车辆含高程的里程信息计算公式为
采用精度更高的实时动态载波相位差分技术(real time kinematic,RTK)提供位置基准,由位置基准计算里程基准,此过程也会有坐标转化的过程,将转化后的坐标定义为(X,Y,Z)[12]。基准里程包括不含高程的里程基准和含高程的里程基准两种。不含高程的里程基准计算公式为
含高程的里程基准计算公式为
利用出租车测试里程和RTK的基准里程可以计算出里程的误差率,里程误差率的计算公式为

里程误差率能够反映组合导航技术在里程统计中的精度和准确性,是一个重要的数值指标,出租车计价器里程的误差率是1%~4%。当出租车的里程误差率超过标准时,就应到出租车检定部门进行检定,检定合格后方可重新投入使用,避免因里程不准造成计价不准而影响乘客和出租车司机的合法权利[13]。
2.2 计 时
提取出的卫星定位信息中包含时间信息,组合导航的时间精度很高,完全满足出租汽车计价器对时间的要求。关键是要将出租车中对于计价的时间信息提取出来并加以利用,不仅可以显示出租车的日期和时间,也可以计算出乘客在乘车过程中低速行驶及停车的时间。NMEA0183协议中的时间信息是UTC时间,将其加8即可得到当前的北京时间,时间信息中不仅包含年月日,也包含时分秒。时间信息与数据的更新率相关,如数据的更新1 Hz,则定位数据1 s发送1条,UTC时间间隔为1 s;数据更新率为10 Hz,则定位数据1 s发送10条,UTC时间间隔为0.1 s,也就是说时间信息是由数据的更新率确定的。可以根据定位信息中的时间信息计算重车状态下车辆的等候时间,并作为计价的依据[14]。
2.3 速 度
提取出组合导航技术信息中包含的速度信息,记录车辆的行驶状态,对于出租车计价来说,主要是将车辆在低速行驶过程中的速度信息提取出来,并记录对应的低速行驶时间,计算车辆在低速行驶过程中产生的费用。组合导航技术得到的速度信息是惯导和卫星导航技术融合的结果,具有很高的精度和准确性。
3 组合导航计算里程的程序实现及精度分析
试验线路分为开阔的直线路段和复杂的城市环境的曲线路段,如图1和图2所示,验证组合导航技术在里程信息统计中的可用性。数据采样频率为1 Hz,即每秒获取一个定位点的位置信息。基准数据采样采用支持RTK差分技术的中海达接收机,其平面测量精度为:±(10 mm+1×10-6D),高程测量精度为:±(20 mm+1×10-6D)。测试数据采用东方联星CC50EBGI组合导航模块,该模块加入了三轴MEMS(Micro-Electro-Mechanical System)陀螺仪。三轴MEMS加速度计是一款小体积、多系统、高灵敏度、低功耗、易集成的小型化组合导航系统,它可以实现载体的实时高精度三维定位、三维测速、三维测姿、精确授时,同时在卫星失锁状态下,也可短时间内精准定位、测速、测姿,广泛应用于航运、公路交通、车载监控、车载导航、手持及物品跟踪等领域[15]。组合模块的位置精度为3 m圆概率误差(circular error probable,CEP),速度精度为1 m/s。车辆动态导航定位的精度随着车辆行驶环境的变化也是不一样的,在开阔路段车辆的RTD定位精度达到亚米级,而在遮挡或卫星信号受到干扰的情况下,定位精度会下降,从亚米级能达到几十米的定位误差。

图1 直线测试路段
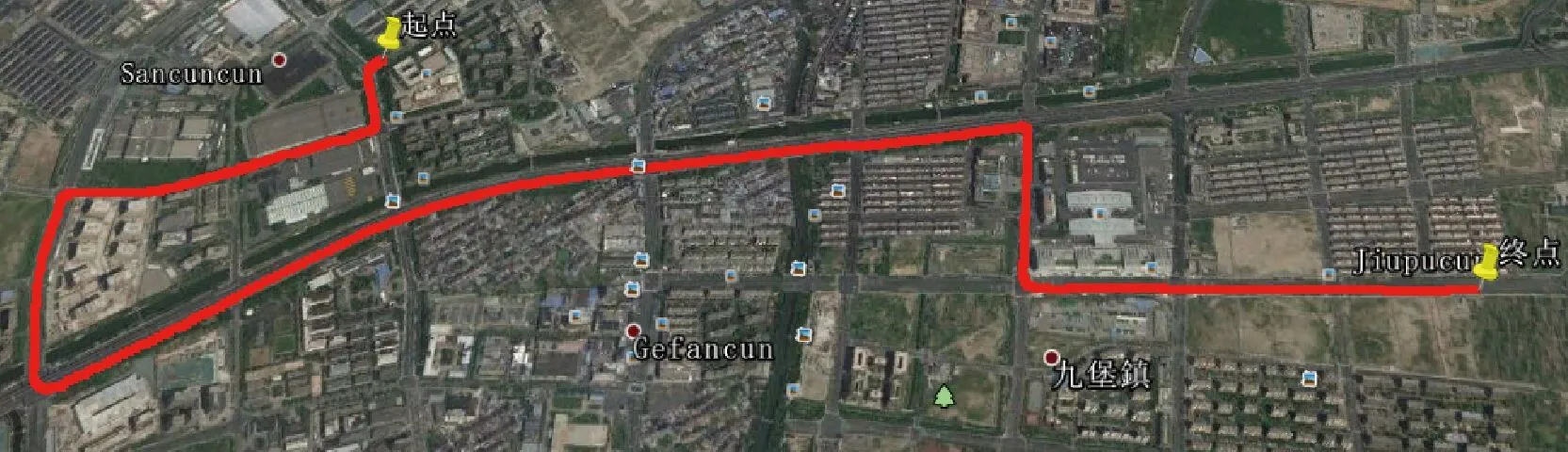
图2 曲线测试路线
开阔的路段测试过程中分为拔天线和不拔天线两种模式:拔天线模式主要是模拟车辆在卫星信号不好的情况下,利用单一的惯性元件进行里程统计的性能;不拔天线就是卫星和惯导组合导航模式正常工作时里程统计的性能。直线路段测试了4次,其中第1段直线和第4段直线没有拔天线,第2段直线和第3段直线拔天线测试,拔天线时间1 min,测试结果见表1。

表1 直线路段里程测试分析
从表1中可以看出,利用组合导航统计出租车的行驶里程信息在1%~4%之间,最大的里程误差率为1.5%,完全满足出租车里程信息统计的需要。为了验证组合导航技术在出租车计价中里程信息统计的准确性,随机选取一段城市路段进行跑车测试。
城市环境路线跑车测试分析分为整体路线里程和路线分段里程两种,其中路线分段是以每1 km的里程路段将车辆行驶轨迹切分,分段分析里程信息的方法,可以分析车辆在不同路段、路况情况下车辆里程信息的误差率。车辆整段里程分析情况见表2,车辆分段里程分析情况见表3。
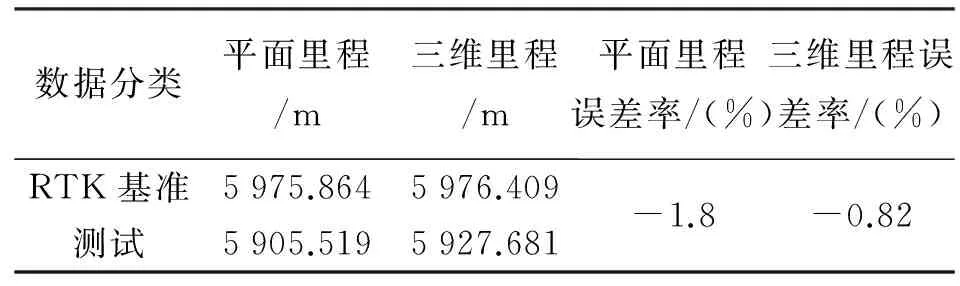
表2 曲线路段整段路段里程分析

表3 曲线路段分段里程分析
从表2中可以看出,跑车测试的6 km路线,即整段路线数据的分析中,利用组合导航技术统计出的平面和三维里程误差率均满足1%~4%的误差标准。从表3中的分段里程可以看出,第2段的里程误差较大,第2段RTK基准数据的使用率较低,RTK设备在数据采集过程中受到高架桥、大楼等建筑物的遮挡,使基准RTK定位点丢失造成基准里程信息不准,与组合模块本身的性能无关。
在试验中采用RTK差分方法获得的定位数据作为里程统计的基准,RTK差分定位方法受环境影响很大。在复杂环境中验证组合导航技术里程统计精确性,使用单一的RTK设备采集基准数据存在很大误差,如基准定位点漂移、缺失等现象都会影响定位点的精度,进而影响基准里程的结果。因此跑车测试过程中要尽量选择开阔路段,确保基准数据的高精度定位。选取精确可靠的曲线路段的里程基准,是确定组合导航技术在里程信息统计中的关键。
4 结 语
组合导航技术在出租车计价系统中的应用,增加了出租车计价的准确性、稳定性和可靠性,避免单一依靠里程计计价的不确定性。组合导航的定位信息,一方面可以解决里程计计价问题,另一方面还可以将其应用于出租汽车的高精度实时定位,满足了车辆定位的高精度和实时性要求。定位信息在出租汽车上的多种用途,可实现数据资源的有效可靠利用,为组合导航及北斗卫星系统的应用发展起到了积极的推动作用。
[1] 吴玲,陈传德,孙永荣.车载GPS/北斗/DR组合导航系统研究[J].光电与控制,2011,18(3):48-51.
[2] 许云达,赵修斌.基于卫星导航系统的组合导航技术及其发展综述[J].控制与制导,2014(5):68-71.
[3] 曾伟一,林训超,曾友州,等.组合导航技术的发展趋势[J].成都航空职业技术学院学报,2011,27(2):41-44.
[4] 史洲.出租汽车计价器的发展与车载GPS[J].中国计量,2009(2):59-60.
[5] 安利.基于中间件的多源导航信息融合算法研究[D].郑州:信息工程大学,2014.
[6] 杨建潮.出租汽车计价器的计价原理[J].计量技术,2001(4):44-45.
[7] 曹婷婷,高玉.GPS中NMEA-0183协议的应用[J].电子工程师,2006,32(10):8-11.
[8] 叶建针.出租车计价器防作弊技术与预防措施[J].科技信息,2011(19):85,88.
[9] WANG W, WANG D. Land Vehicle Navigation Using Odometer/INS/vision Integrated System[C]∥IEEE Conference on Cybernetics and Intelligent Systems. [S.l.]:IEEE, 2008: 754-759.
[10] 杨洋.GPS/INS深组合导航中的关键技术研究[M]. 南京: 南京理工大学,2013.
[11] 李团,章红平,牛小骥,等.城市环境下BDS+GPS RTK+INS紧组合算法性能分[J].测绘通报,2016(9):9-12.
[12] 吴有龙,王晓鸣,杨玲,等.GNSS/INS紧组合导航系统自主完好性监测分析[J].测绘学报,2014,43(8):786-795.
[13] 马宏阳,程鹏飞,黄华东.GPS/INS位置、速度和姿态全组合导航系统研究[J].测绘通报,2016(3):10-14.
[14] 刘帅. GPS/INS组合导航算法研究与实现[D].郑州:信息工程大学, 2012.
[15] 许云达,赵修斌.基于卫星导航系统的组合导航技术及其发展综述[J].飞航导弹,2014(5):68-71.
Application of Integrated Navigation Technology in Taxi Valuation System
MA Yongjian,LIU Songlin,WANG Tonghe,XU Yali,LI Rongpan
(Information Engineering University, Zhengzhou 450001, China)
Aiming at the problems in timing and calculating mileage for taximeter, the method of using GNSS+INS+Odometer integrated navigation technology in terms of the taxi is put forward. Using integrated navigation technology in the process of the taxi passenger mileage and time calculation, on the one hand, can avoid the traditional mileage in the process of using odometer itself and human factors to change the actual mileage, affect the accuracy of pricing. On the other hand, the method can avoid the single odometer valuation process once appear fault, the results of mileage will appear larger error or unable valuate, etc., increasing the reliability of the taxi pricing system. The car experiment proves that integrated navigation technology applied to taxi valuation system is able to valuate taximeter mileage, timing, and such key problems as low valuation made great improvement, accuracy and reliability are improved significantly. Avoid contradiction between the passengers, taxi drivers, safeguard the legitimate rights and interests of both sides. This has played a good role in promoting the development of integrated navigation technology.
integrated navigation;odometer;valuation principle;range error rate
马永健,刘松林,王同合,等.组合导航技术在出租车计价系统中的应用[J].测绘通报,2017(7):76-80.
10.13474/j.cnki.11-2246.2017.0227.
2016-12-26;
2017-02-16
信息工程大学“2110工程”建设项目(510087)
马永健(1990—),男,硕士,主要研究方向为导航技术与应用。E-mail:495586394@qq.com
P228
A
0494-0911(2017)07-0076-05
猜你喜欢
建材发展导向(2021年10期)2021-07-16 07:14:34
建材发展导向(2021年10期)2021-07-16 07:14:04
数学小灵通·3-4年级(2020年10期)2020-11-10 09:15:16
今古传奇·故事版(2017年24期)2018-02-07 19:02:53
车迷(2017年12期)2018-01-18 02:16:12
中国宝玉石(2017年2期)2017-05-25 00:37:11
中国宝玉石(2017年1期)2017-03-24 09:19:42
山东青年(2016年1期)2016-02-28 14:25:29
IT时代周刊(2015年8期)2015-11-11 05:50:45
读写算(上)(2015年6期)2015-11-07 07:18:00
