
基于霍尔开关的磁性浮子式液位传感器设计
2017-08-09 01:34李凤玲李宝生
传感器与微系统 2017年7期
徐 冬, 李凤玲, 张 宁, 李宝生
(中国电子科技集团公司 第四十九研究所,黑龙江 哈尔滨 150001)
基于霍尔开关的磁性浮子式液位传感器设计
徐 冬, 李凤玲, 张 宁, 李宝生
(中国电子科技集团公司 第四十九研究所,黑龙江 哈尔滨 150001)
针对传统的干簧管式液位计接触点易产生抖动、长期稳定性差等缺点,设计了一种利用开关式霍尔元件作为敏感元件的液位传感器,详细介绍了其工作原理和设计方案,并利用ANSYS软件对磁性浮子进行了磁场仿真计算,通过分析可根据测量精度确定所需永磁体大小,简化工艺流程,缩减了工作量。该传感器可根据需要输出标准电流信号4~20 mA或数字通信RS—485,并可配备LED现场指示器,实验表明:该传感器具有有效距离大、不易受干扰、响应速度快、可靠性高等特点。
霍尔元件; 磁翻板; 液位传感器
0 引 言
常见的远传液位传感器是利用磁铁驱动干簧管吸合改变回路中的阻抗实现液位测量的[1,2],但是这种原理有很多缺点。由于干簧管的触点和簧片相当小而精致,所以难以承受高压或大电流。电流过大时,簧片会因过热失去弹性,接触点极易产生抖动,并且接点接触电阻大等等。本文设计的液位传感器利用阵列式霍尔开关作为敏感元件感受液位变化,与磁翻板液位计配合可真正实现液位现场显示和远传。磁翻板液位计是将与磁铁组成为一体的浮球置于非磁性的金属管中,浮球随着管中的液位上升或下降,管外装有指示单元,指示单元为一系列正面为白色,背面为红色的磁性翻板组成。翻板受磁性浮球移动的吸引而翻转180°,通过颜色的变化来指示液体的液位。指示单元还可以做成LED光柱显示面板,同样通过LED光柱颜色变化指示液位,行业标准为液绿汽红[3]。该液位计除了本地显示功能外,还可以配备远传液位传感器,将液位信号转换成4~20 mA电流输出或者数字通信RS—485输出,实现远距离监测和控制。该系列产品特别适合高温高压、高粘度、强腐蚀性条件下液位的检测。
1 传感器工作原理
传感器将与磁铁组成为一体的浮球置于非磁性的金属管中,浮球随着管中的液位上升或下降,管外捆绑着内部含有霍尔开关的远传液位计,当被测容器中的液位升降时,与磁性浮子正对的霍尔元件周围磁场增大,霍尔开关开启,其他霍尔开关周围磁场不变,霍尔开关关闭。单片机(MCU)采集控制单元通过扫描检测所有霍尔元件的开关状态即可得到实时液位。同时,管壁外捆绑LED光柱显示面板,将霍尔开关的输出信号传送至LED面板形成本地显示单元,通过LED光柱颜色变化指示液位,如图1所示。
2 传感器设计方案
2.1 电路设计
传感器电路原理框图如图2所示。传感器主要由电源转换电路、霍尔元件组成的测量阵列、CPU扫描采集控制、多路选择开关、电流输出转换等组成。霍尔元件等间距同向排列,并联接入电源,多路选择开关在MCU控制下依次触发其中一路霍尔开关,使其处于工作状态。当某路霍尔开关处于开启状态,表示该位置即为被测液位高度。由于每次仅使一只霍尔开关处于检测状态,因此,共有170个测试点的霍尔电路板耗电电流仅为30 mA,外加通信电路,总工作电流不超过60 mA,真正实现了低功耗设计[4]。
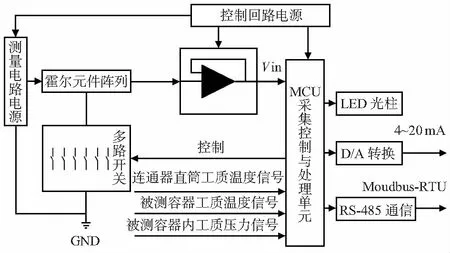
图2 传感器电路原理框图
2.2 磁场计算
磁翻板液位计在工程上通常用于锅炉等大型设备液位的测量,因此该液位计长度长,重量大,如若被测设备内部存在较大压力,相应地需要将液位计的壁厚增加,势必会导致液位计重量加大,在传感器调试阶段,需要将浮子内部的磁铁和霍尔开关相匹配,为了避免虚假液位和保证测量的精确度,必须保证任一时刻最多只有2个霍尔开关处于开启状态。若仅利用试验手段反复测试磁铁和霍尔开关的匹配度,需要多次拆装液位计,因此需要在设计阶段准确计算出霍尔开关周围的磁通密度,进而减少工作量[5,6]。
本文霍尔开关磁性工作阈值(BOP)为175 Gs,间距为10 mm,条形磁铁与霍尔开关间距为35 mm,如图3所示。利用大型有限元分析软件ANSYS对磁铁的磁场进行分析和优化设计,节点磁通密度云图如图4所示。提取距离磁铁中心35 mm的空气单元节点磁通密度值,并绘制成曲线(图5所示),根据结果可知:条形磁铁大小为φ20 mm×20 mm时,在距离35 mm处磁通密度最大为245 Gs,位于磁铁中心处(图3所示A点),当磁铁处于A点时,只有它处于工作状态,而当磁铁移动至B,C位置时,由于单级霍尔开关只能感受N级磁场,故而A,B两点处霍尔开关同时开启。
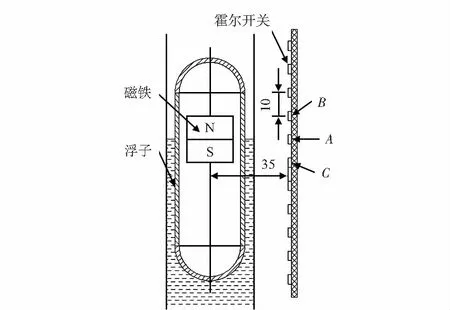
图3 霍尔开关与磁铁位置示意图
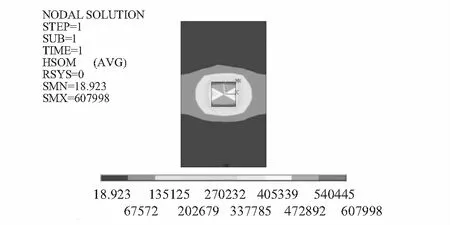
图4 磁铁和空气层节点磁通密度云图
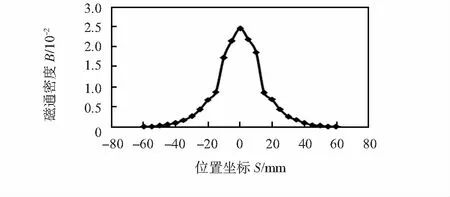
图5 35 mm处空气层节点磁通密度趋势
磁铁大小确定后,根据阿基米德定律计算出浮子的高度,保证磁铁的中心位置与水面处于同一位置,可根据式(1)计算得到磁铁在浮子内的安装位置
G=ρgV
(1)
3 测试结果与性能分析
按照上述设计方案研制生产了一只量程为4 250 mm的液位传感器,工作电压24 VDC,标定装置为一个透明的连通容器,刻度已经过标定检验合格。标定时向连通容器内加水至测试点,记录电流输出值,目测LED显示面板,并通过上位机软件监测传感器输出值,如表1所示。结果表明:传感器性能稳定可靠,既可输出4~20 mA电流信号,又可以实现数字通信RS—485输出,还可进行本地显示。传感器精度小于等于±10 mm,完全满足使用要求。

表1 传感器标定数据
4 结束语
磁性浮子式液位传感器利用霍尔开关替代了干簧管,提升了传感器的稳定性和可靠性,更适合应用于恶劣环境条件下。在结构设计中,利用ANSYS仿真软件等辅助手段较准确地计算出磁性浮子的磁场分布,根据测量精确度、霍尔开关的磁场强度阈值、霍尔开关到浮子的距离等已知条件计算出浮子内磁铁的大小,简化了工艺流程,减少了工作量。在程序设计时,同一时刻仅使一只霍尔开关处于工作状态,降低了功耗,避免了虚假液位。
[1] Edward Ramsden.Hall-effect sensors theory and applications[M].Burlington,USA:Newnes,2006:50-100.
[2] Yang Wenrong,Ran Feng.CMOS chopper amplifier for monolithic magnetic Hall sensor[J].IEEE Transactions on Magnetics,2007,7(7):439-441.
[3] 金太东,石成江.基于阵列式霍尔元件的界位传感器设计与研究[J].机械设计与制造,2012(6):204-206.
[4] 李凤玲,徐 波,王 冰,等.基于金属网络传感器的液滴检测装置设计[J].传感器与微系统,2016,35(5):60-63.
[5] 陈棣湘,潘孟春,罗飞路.基于霍尔传感器的高准确度磁场测量方法[J].传感器技术,2004,23(2):59-61.
[6] 张克通,王化明.圆柱永磁体磁场及磁力分析[J].电气技术与自动化,2010,39(3):161-164.
Design of magnetic float type liquid level sensor based on Hall switch
XU Dong, LI Feng-ling, ZHANG Ning, LI Bao-sheng
(The 49th Research Institute,China Electronics Technology Group Corporation,Harbin 150001,China)
Aiming at shortcomings of traditional level gauge using tongue tube is easy to produce vibration,and has poor long-term stability,design a novel liquid level sensor using Hall switch as sensitive element.Working principle and design scheme are introduced in detail,and magnetic field of the magnetic float is simulated using ANSYS software.Through analysis,the size of permanent magnet can be determined according to measurement precision,process is simplified and workload is reduced.The sensor can output standard current signal 4~20 mA and digital communication RS—485,according to the need, and it also can be equipped with LED indicator.The experiment shows that the sensor has many characteristics like large effective distance,less interference,fast response rate, and high reliability.
Hall element; magnetic flap; liquid level sensor
10.13873/J.1000—9787(2017)07—0110—02
2017—01—18
TP 212
A
1000—9787(2017)07—0110—02
徐 冬(1982-),女,工程师,主要从事特种传感器的研究工作。
猜你喜欢
小学生作文·小学低年级适用(2022年5期)2022-06-26
知识就是力量(2021年9期)2021-09-18
探索科学(学术版)(2021年7期)2021-08-05
建材发展导向(2021年10期)2021-07-16
探索科学(学术版)(2020年7期)2021-01-13
水利科学与寒区工程(2020年4期)2020-08-21
商品与质量(2019年35期)2019-11-28
科技视界(2019年26期)2019-11-26
中国惯性技术学报(2018年4期)2018-11-08
浙江大学学报(工学版)(2016年2期)2016-06-05
