
改进型卡尔曼滤波的PM 2.5浓度预测系统*
2017-08-09 01:34许江淳余丽玲岳秋燕
传感器与微系统 2017年7期
许江淳, 余丽玲, 岳秋燕, 任 杰
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
改进型卡尔曼滤波的PM 2.5浓度预测系统*
许江淳, 余丽玲, 岳秋燕, 任 杰
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
针对目前室内空气净化器功能单一、自动调节能力弱的特性,设计了一种改进型卡尔曼滤波对PM 2.5浓度进行预测的系统,为净化器提供可靠的调节参数。选用S3C2440芯片,通过外设采集PM2.5浓度和温度,以及对历史数据进行分析。通过改进型卡尔曼滤波对历史数据、PM2.5浓度以及温度进行融合,可以准确得到下一时刻的浓度值。测试结果表明:系统运行稳定,算法跟踪效果明显,鲁棒性强,可以准确预测出下一时刻的PM2.5浓度,并且预测误差在2.0 %以内,满足设计要求。
卡尔曼滤波; PM2.5; 净化器; S3C2440芯片; 浓度值; 鲁棒性
0 引 言
目前,越来越多的人关注室内空气质量,多采用空气净化器来避免受到高浓度PM2.5的污染。但目前的空气净化器功能单一,功率消耗固定无自动调节能力,功耗较大。寻找一种办法来增强净化能力和降低电能的消耗很有必要。为此,本文设计了一种基于改进型卡尔曼滤波的PM2.5浓度预测系统,可通过历史数据结合当前测量值,以及附加温度条件来预测下一时刻的浓度,为空气净化器提供下一时刻浓度预测值。净化系统根据预测浓度值调节空气净化器的输出功率,既能净化空气,又能避免能源浪费。
1 系统总体方案设计
智能PM2.5浓度检测系统的设计如图1所示,MCU芯片为S3C2440,采用ARM9架构,嵌入卡尔曼滤波模型,通过外设接口采集PM2.5浓度、环境温度,接入准确的时钟信号。选用夏普的集成光散射式PM2.5浓度检测传感器对PM2.5浓度进行采样,PM2.5浓度检测传感器以及NTC热敏电阻器和锂电池将信号以模拟量的方式传入A/D转换器内,A/D转换器将PM2.5浓度模拟量信号、电池电压信号以及温度模拟量信号进行模/数转换,将模拟量信号转换为易处理的数字信号,传给微处理器MCU,MCU将获得的数字信号以及从时钟电路中读取的时钟数据进行计算转换后,送入到LCD液晶中,显示PM2.5的当前实测浓度值和下一时刻的预测值。系统中的按键查询部分能实现显示模式的切换,以及对时间和日期等的调节。
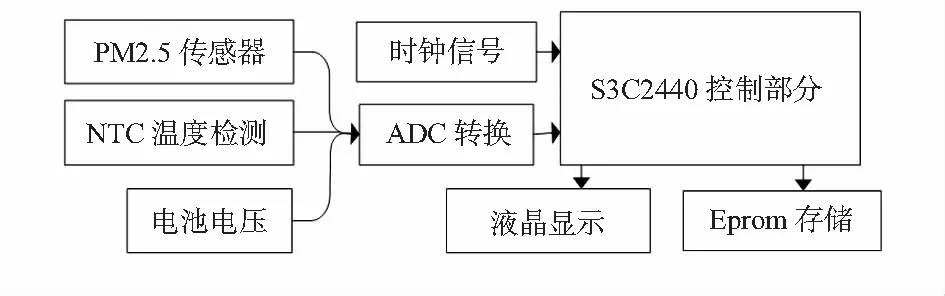
图1 智能PM2.5浓度检测装置系统框图
空气中所含颗粒物的浓度值越高,对光线的散射能力就越强。通过测定光的散射强度,可以算出颗粒物的浓度理论值[1]。然而,实际应用中,因为光的散射强度和颗粒物的浓度关系受到了诸多因素影响,比如:颗粒物的形状、粒径分布、比重和化学组成等,而这些都由污染源的成分组成所决定。这表明颗粒物的质量浓度和光散射之间的关系公式可能随时发生改变,所以要求仪器的使用者事先用其他的标准方法进行定标。光散射法的原理图如图2所示。
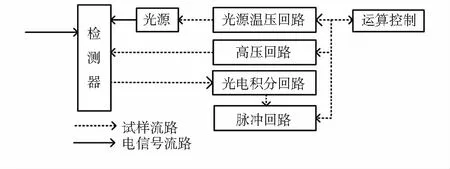
图2 光散射法的原理
特定光源发出光线照射于颗粒物上并散射,该散射光穿过集光镜后照射到传感器里,光线传感器会把接收到的光信号转换成电信号,再经过放大缓冲及分析电路,计量出脉冲发生量,即获得由每分钟的光脉冲数(CPM)所表示的颗粒物相对浓度[2]。当这些颗粒物的性质一定时,就能通过事先用称重法求出的CPM与颗粒物浓度之间转换的系数K,然后将CPM值通过K值直接转换并显示成质量浓度,μg/m3。
2 传感器硬件实现
2.1 MCU控制模块
MCU控制模块主要用来处理外部逻辑、数据采样、数据转换、数据计算、人机交互、控制显示。 MCU控制部分电路如图3所示,上电后,MCU复位,初始化内部的各个寄存器和外部设备。MCU通过I/O口操作A/D转换芯片,读取PM2.5浓度检测传感器的数据、电池电压数据和温度数据并进行相应的计算和转换,最终由LCD进行显示。

图3 MCU控制电路
2.2 PM2.5浓度测量
PM2.5浓度测量模块采用SHARP的PM2.5质量浓度传感器,型号为GP2Y1010AU0F。传感器利用光散射法进行PM2.5浓度的检测,具有体积小、功耗低、精度高、使用简便以及价格低的优势[3]。PM2.5质量浓度传感器采样电路如图4所示。
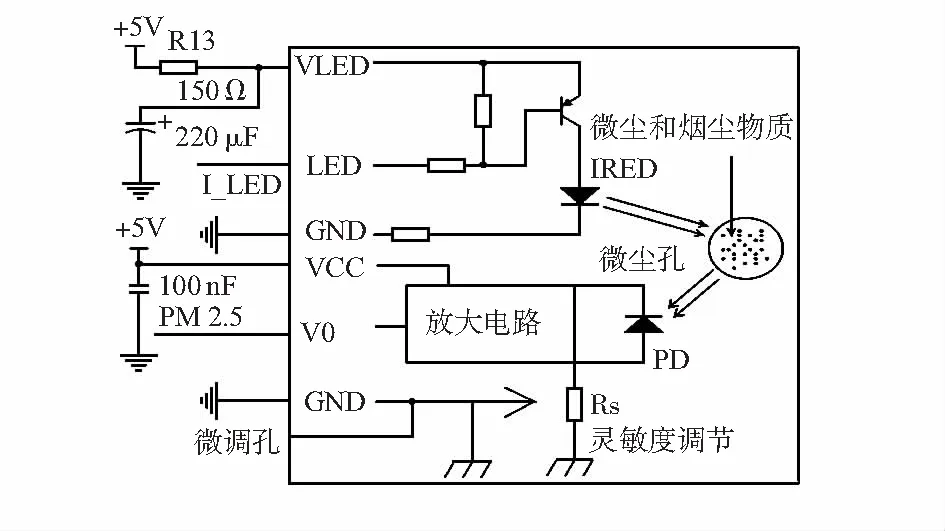
图4 PM 2.5质量浓度传感器采样电路
2.3 温度检测
温度检测模块将NTC热敏电阻器阻值随温度的变化转换为电压随温度的变化,NTC温度采样电路如图5所示。NTC热敏电阻器RT1与电阻器R10串联分压,把NTC热敏电阻的阻值随温度的变化转换为电压的变化,输出给模/数转换器ADC进行数据转换。R11与C10的作用是对采样得到的电压信号进行滤波,使得输出的温度电压信号更加稳定,测量结果更加准确。

图5 NTC温度采样电路
温度电压信号U与温度T之间的关系为

(1)
通过式(1)可以根据模/数转换器(ADC)采集的电压数据进行计算,得到相应的温度值,计算得到温度取小数点后2位。
3 建立改进型卡尔曼滤波预测模型
对局部环境的PM2.5浓度测量影响因素主要为温度影响,气压和风速在局部环境的某连续时刻在此次卡尔曼滤波中认为不变[4]。
(2)
(3)
(4)

(5)

Lk(t)=HNk(t)LNk(t)+HPk(t)LPk(t)+HTk(t)LTk(t)+Vk(t)
(6)
式中Lk(t)为第t天k时刻的浓度值;LNk(t)为该时刻的基本浓度;LPk(t)为前一天同一时刻的浓度值;LTk(t)为该时刻的气温;Vk(t)为误差;HNk(t),HPk(t),HTk(t)均为参数矩阵。由于预测的是某个时刻的值,所以式(6)中的各个量都为一维矩阵。
为了方便应用卡尔曼滤波理论进行状态预测,现做如下变换
Zk(t)=Lk(t)
(7)
Hk(t)=[Hk(t),HPk(t),HTk(t)]
(8)
Xk(t)=[LNk(t),LPk(t),LTk(t)]T
(9)
由式(7)、式(8)、式(9)可得
Xk(t)=Fk(t)Xk(t-1)+Wk(t)
(10)
Zk(t)=Hk(t)Xk(t)+Vk(t)
(11)
式中Zk(t)为测量值;Hk(t)为测量矩阵;Fk(t)为状态转移矩阵;Wk(t)为状态误差。由于状态变量是连续若干天同一时刻的温度,它在短期的浓度预测中可以看成是缓变状态,因此,可令Fk(t)=I,I为单位矩阵。由于同一时刻,其基本负荷可以看成不变,可以令HNk(t)=I,而Hpk(t),HTk(t)可以通过回归算法得到。设浓度的预测方程为
(12)
系统中,设计有温度传感器,在进行卡尔曼预测时可在预测值的基础上加上实时温度的修正值来进行浓度值的预测[5]。

(13)
式中bk为修正系数,通过温度对空气扩散模型实验获得bk取值。


(14)
4 系统整体实现
MCU通过搭载Linux操作系统,嵌入卡尔曼滤波算法对PM2.5浓度进行预测。该浓度预测系统整体实现流程图如图6所示。

图6 系统整体实现流程
在系统启动后,系统首先初始化传感器各个接口,通过对外部ADC的操作,采集实测PM2.5浓度值和当前温度,并将历史数据存储至Eeprom中,方便后期预测调用。接着初始化卡尔曼滤波相关参数,如F,H,Q0,R0等参数,将参数代入新型卡尔曼滤波模型算法程序中,在卡尔曼算法每次递推过程中,都将实时采集当前的浓度Zk及温度LTk。最终,每一次预测结束后会得到下一时刻的预测浓度,系统会将每次检测值和预测值进行存储操作,并显示到液晶显示屏。
5 实验结果分析
将PM2.5浓度预测系统置于教研室阳台上检测局部环境的浓度变化。由于测试周期相对较短,且测试地位于云南昆明,是典型的高原干湿两季特征,昼夜温差大,周围环境比较稳定[7],忽略气压和瞬时风速造成的影响,本次测试时间为7×24 h,每1 h进行一次预测,最后通过串口将所有实测值和预测值读取至电脑中进行数据分析。随意抽取测试中某一天的从0 h~24 h的数据,通过相对误差λ1的计算方法求得每次预测的相对误差,如图7所示。实测值和预测值对比曲线,如图8所示。

图7 系统预测误差
通过对图8分析可得,测试地区PM2.5在一天内的浓度峰值处于早晨8h左右,低谷值处于下午18h左右,根据改进型的卡尔曼滤波预测的浓度值基本符合真实测量值。
通过图7所示,预测值和实测值的相对误差在2.0 %以内,基本满足设计要求。通过1周的实时监测表明:系统稳定性强,测量精度高,预测跟踪效果好,算法鲁棒性强。
6 结 论
本文设计了改进型卡尔曼滤波PM2.5浓度预测系统,完成对测试电路的设计和程序的开发,并通过对卡尔曼滤波进行改进增强系统对PM2.5浓度的预测精度。通过测试表明:系统运行稳定,能准确测量PM2.5浓度,预测精度高,能够准确地为空气净化器提供预测数据。在后期研究中可以将此预测数据与净化器相结合,不仅能有效增强净化的针对性,还能实时改变空气净化器的工作功率,从而降低能耗。将此功能添加至产品中,可达到一定的经济效益和节能作用。
[1] 汤光华,许传龙,邵礼堂,等.差分吸收光谱法在线测量烟气浓度实验研究[J].仪器仪表学报,2008(2):244-249.
[2] 孔 明,李轶凡.基于同轴回归激光传感器的水表误差检测系统[J].传感器与微系统,2012,31(7):98-101.
[3] 徐如瑜,谢利利,田贻丽.微尘浓度测量仪的研究[J].仪器仪表学报,2004(S2):187-188,191.
[4] 高宗余,李德胜.基于卡尔曼滤波算法的微型SINS误差剔除的研究[J].传感器与微系统,2009,28(9):22-24.
[5] 修春波,任 晓,李艳晴,等.基于卡尔曼滤波的风速序列短期预测方法[J].电工技术学报,2014(2):253-259.
[6] 焉晓贞,罗清华.基于卡尔曼滤波的动态传感数据流估计方法[J].仪器仪表学报,2013(8):1847-1854.
[7] 张朝能,王梦华,胡振丹,等.昆明市PM2.5浓度时空变化特征及其与气象条件的关系[J].云南大学学报:自然科学版,2016(1):90-98.
PM 2.5 concentration prediction system based on improved Kalman filtering*
XU Jiang-chun, YU Li-ling, YUE Qiu-yan, REN Jie
(Faculty of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650500,China)
In view of the characteristics of current indoor air purifier function is single and the automatic regulation ability is weak,an improved Kalman filtering system is designed to predict the concentration of PM2.5,which provides a reliable regulation parameter for air purifier.The S3C2440 chip is used to collect PM2.5 concentration and temperature,and analyze on historical data.On the basis of the system,through the improved Kalman filter to fuse historical data,PM2.5 concentration and temperature can be accurately obtained concentration at the next moment.The results of test show that the system runs stably with its effective algorithm,strong robustness,and it can accurately predict the PM2.5 concentration at the next time point.The prediction error is less than 2.0 %,which can meet the requirements of design.
Kalman filtering; PM2.5; purifier; S3C2440 chip; concentration value; robustness
10.13873/J.1000—9787(2017)07—0106—04
2016—07—13
国家质检总局科技计划资助项目(2013QK104)
TP 311
A
1000—9787(2017)07—0106—04
许江淳(1962-),男,副教授,硕士生导师,从事嵌入式系统技术及应用、SOC及FPGA系统技术应用等研究工作。
猜你喜欢
测控技术(2018年12期)2018-11-25
家庭影院技术(2018年6期)2018-07-17
北京航空航天大学学报(2017年9期)2017-12-18
环境保护与循环经济(2017年2期)2017-09-26
环境科技(2016年1期)2016-11-08
中国科技信息(2016年6期)2016-08-31
电源技术(2016年9期)2016-02-27
浙江大学学报(工学版)(2015年1期)2015-03-01
中国质量与标准导报(2014年12期)2014-02-28
中国质量与标准导报(2014年5期)2014-02-28
