
表贴式永磁直线同步电机控制系统参数自动整定方法
2017-08-07 09:50薛晓明
电机与控制应用 2017年7期
薛晓明, 陶 洪
(常州信息职业技术学院,江苏 常州 213164)
表贴式永磁直线同步电机控制系统参数自动整定方法
薛晓明, 陶 洪
(常州信息职业技术学院,江苏 常州 213164)
针对表贴式永磁直线同步电机矢量控制系统参数设置需反复测量和调试的问题,提出一种自动整定的方法。测量电流控制器输出波形并计算相应的沃尔什一阶系数,反复迭代反电动势常数和定子电感,直至沃尔什一阶系数收敛到零,自动辨识表贴式永磁直线同步电机的电气参数;随后让电机自由运行辨识出机械参数;最后计算出速度和电流控制器的PI参数。样机测试结果验证了提出方法的有效性。
表贴式永磁直线同步电机; 沃尔什一阶系数; 自动整定; 矢量控制
0 引 言
表贴式永磁同步直线电机(Surface-Mounted Permanent Magnetic Linear Synchronous Motors,SPMLSM)因结构简单、定位精度高、推力大、动态性能优越等优点在精密机床、工业机器人等领域受到广泛关注。为了获得直流电机动、静态高性能控制特性,通常采用产生推力和磁通的电流分量保持垂直的矢量控制策略,实现电机推力和磁通的解耦控制。矢量控制的关键需要准确的电机参数,初始调试时专业工程师一般根据电机制造厂商提供的标称值整定控制系统的参数。由于每台电机实际值与标称值不完全一致,需要利用高性能的设备进行测量后反复调整,工作量非常之大。为此,很多学者提出了各种自整定策略,基于模型[1-2]的自整定参数依赖系统模型,虽快速性较好,但效果并不理想;基于规则[3]的自整定参数虽效果较好,但参数整定的快速性较差。文献[4]将基于模型和规则相结合,采用固定步长迭代方法自整定参数,但优化时间太长。文献[5]提出变步长整定优化方法,但算法过于复杂。文献[6]提出应用沃尔什函数测量永磁同步电机的反电动势常数和定子电感,但没有给出控制器的参数整定算法。
为此,本文提出一种自动整定SPMLSM控制系统参数的方法。提出的方法通过计算永磁同步直线电机矢量控制系统电流控制器输出信号的一阶沃尔什系数,不断迭代辨识电机参数,直至一阶沃尔什系数收敛为零,然后自动算出速度、电流PI控制器的比例和积分增益,实现系统参数的自动整定。试验结果验证了提出方法的正确性。
1 dq坐标系下SPMLSM数学模型
假设不计涡流、磁滞损耗和铁心饱和,绕组磁势及气隙磁密按正弦规律分布。dq坐标系下, SPMLSM数学模型如下。
电压方程:
电磁推力方程:
机械运动方程:
式中:ud、uq,id、iq——d、q轴电压、电流分量;Rs——定子电阻;Ls——定子电感;Ke——反电动势常数;v——动子速度;Fe——电磁推力;FL——负载;M——动子质量;B——粘性摩擦因数;τ——极距。
根据式(1)~式(4)可得SPMLSM在dq坐标系下的传递函数框图,如图1所示。

图1 SPMLSM在dq坐标系上的传递函数框图


图2 永磁同步直线电机矢量控制系统方框图
2 控制系统PI参数分析
2. 1 电流控制
电流控制传递函数结构如图3所示。

图3 电流控制传递函数结构图
基于电流的调节往往比转速的变化快得多,在电流控制设计中往往忽略反电动势对电流环动态性能的影响,应用零极点相消法,令Kp-iq/Ki-iq=Ls/Rs,则:
观察式(5),电流控制变为一阶系统,ωiq为其频宽,通常设计在500~1 500 Hz[7]。则电流控制比例和积分增益可计算如下:
2. 2 速度控制
速度控制传递函数的结构如图4所示。由于电流回路的频宽比速度回路的频宽高很多,则电流控制的传递函数约为1[7]。若不考虑干扰,则速度控制的闭环传递函数为
式中:Kp-v、Ki-v——控制增益。

图4 速度控制传递函数结构图
设速度回路的频宽为ωv且阻尼比设为1,通过求解特性方程,则控制增益可计算如下:
因此,利用预设的频宽ωv及M、B等参数即可计算出所需速度控制器的增益值,速度回路频宽通常设为电流频宽的1/10。
3 电机参数自动辨识原理
电气参数辨识包括定子电阻Rs、定子电感Ls及反电动势常数Ke。定子电阻Rs有很多文献介绍了自动辨识方法[8],这里主要讨论另外两个电气参数的自动辨识方法。


沃尔什一阶系数为
式中:T——沃尔什一阶函数周期。
w(1,t)的定义如下:
在一个周期T中,如果uq-PI是方波,a1=0,否则a1不等于0。为了自动辨识反电动势常数,令给定速度v*按照式(14)变化:
式中:v0——设定的速度值。
式中:n=1,2,3,…;Kc1为常数。
按式(17)迭代
式中:n=1,2,3,…;Kc2为常数。
当电机速度达到稳态后保持一段时间,由式(4)可得粘性摩擦因数B为
在辨识粘性摩擦因数B后,使iq=0,电机开始线性减速到零,设减速时间为T1,由式(4)可知动子质量M为
4 试验结果
为了验证提出自动整定方法的正确性,在一台永磁直线同步电机样机上进行了试验。电机厂商提供的标称参数如下:持续推力57 N,极距0.062 m,电阻3.2 Ω,电感9.8 mH,反电动势常数20.6 V/m/s。系统主要由控制板和功率板两部分组成,控制板采用TMS320F2812DSP控制器,功率板采用包含驱动的6个IGBT模块,q轴给定电流0.1 A,电流环的频宽ωiq为1 500 Hz,转速环的频宽ωv为150 Hz。
图5给出了系统参数辨识与自动整定过程速度曲线。

图5 电机参数自动整定过程给定速度变化曲线

图辨识过程电流控制器输出波形

图随一阶沃尔什系数a1变化曲线
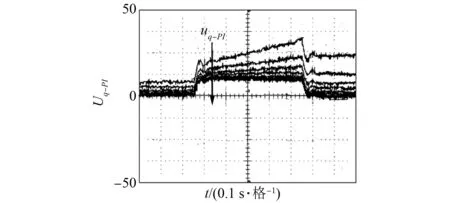
图辨识过程电流控制器输出波形

图随一阶沃尔什系数a1变化曲线

整定参数整定值反电动势常数K*e=19.82V/m/s定子电感L*s=10.28mH动子质量M=2.11kg粘性摩擦因数B=40.047N/m/s电流回路Kp-iq=15.4,Ki-iq=4800速度回路Kp-v=593,Ki-v=47475迭代常数Kc1=0.01,Kc2=0.015
5 结 语
本文提出了通过计算矢量控制永磁直线同步电机电流控制器输出波形的沃尔什一阶系数,并使其迭代收敛至零,从而自动整定永磁直线同步电机控制系统参数的新方法,理论分析和试验结果表明:
(1) 当辨识的电机实际反电动势常数或定子电感大于标称值时,沃尔什一阶系数由负值逐渐收敛到零,电流控制器输出从扭曲变为方波;当辨识的电机实际反电动势常数或定子电感小于标称值时,沃尔什一阶系数由正值逐渐收敛到零,电流控制器输出从扭曲变为方波。
(2) 具有快速简便、无需任何测试设备、自动识别和整定SPMLSM控制系统所有参数的优点。
[1] 刘成颖,刘龙飞,孟凡伟,等.基于遗传算法的永磁直线同步电机伺服系统参数设计[J].清华大学学报(自然科学版),2012,52(12): 1751-1757.
[2] LI K. PID tuning for optimal closed-loop performance with specified gain and phase margins[J].Control Systems Technology, IEEE Transactions on,2013,21(3): 1024-1030.
[3] 王莉娜,朱鸿悦,杨宗军.永磁同步电动机调速系统PI 控制器参数整定方法[J].电工技术学报,2014,29(5): 104-117.
[4] 肖启明,杨明,刘可述,等.PMSM 伺服系统速度环PI控制器参数自整定及优化[J].电机与控制学报,2014,18(2): 102-107.
[5] 付俊永,王爽,程天威,等.基于变步长迭代方法的伺服系统控制器参数自整定[J].电机控制与应用,2015,42(10): 18-22.
[6] CHOI H S, SUL S K. Automatic commissioning for vector controlled ac motors using Walsh functions[C]∥ Conf Rec IEEE-IAS Annu, Meet, 1999: 1284-1289.
[7] 薛晓明,陈震.永磁同步电动机控制系统PI参数自动设置方法[J].微特电机,2016,49(2): 74-77.
[8] 薛晓明,陈震.永磁同步电动机参数自动辨识方法[J].微电机,2015,43(10): 56-59.
[9] SEOK J K, SUL S K. Induction motor parameter tuning for high performance drives[C]∥ Conf Rec IEEE-IAS Annu Meet, 1998: 633-639.
Parameter Auto-Commissioning Method for Surface-Mounted Permanent Magnet Linear Synchronous Motor Drive
XUE Xiaoming, TAO Hong
(Changzhou College of Information Technology, Changzhou 213164, China)
Directed against the problem of repetitious measurement and accommodation of the parameters of the vector control system of surface-mounted permanent magnet linear synchronous motor (SPMLSM), a method of automatic setting was proposed. By applying the linear velocity measurement current controller output waveform and calculating the corresponding Walsh coefficients of first order iteratively until the Walsh coefficients converge to zero, the electrical parameter of surface-mounted permanent magnet linear synchronous motor could be identified automatically and the mechanical parameters of the free running motor could be identified and finally the PI parameters of the speed controller and current controller could be calculated. The validity of the proposed method was verified by the prototype test results.
surface-mounted permanent magnetic linear synchronous motors (SPMLSM); Walsh coefficients of first order; automatic commissioning;vector control
江苏省常州市科技支撑计划(CE20150061)
薛晓明(1964—),男,教授,硕士生导师,研究方向为电机控制。 陶 洪(1964—),男,高级工程师,研究方向为电气工程。
TM 351
A
1673-6540(2017)07- 0054- 05
2016 -10 -24
猜你喜欢
防爆电机(2020年6期)2020-12-14
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
科技风(2018年35期)2018-05-14
意林(2016年23期)2017-01-04
中国信息化周报(2016年41期)2016-12-26
光学精密工程(2016年3期)2016-11-07
哈尔滨工程大学学报(2016年6期)2016-07-28
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
