
抓斗挖泥船移船绞车动态定位控制技术
2017-08-07 09:27:42张红升
中国港湾建设 2017年7期
张红升
(中交疏浚技术装备国家工程研究中心有限公司,上海201208)
抓斗挖泥船移船绞车动态定位控制技术
张红升
(中交疏浚技术装备国家工程研究中心有限公司,上海201208)
抓斗挖泥船深海作业时受到定位钢桩长度限制,一般采用移船绞车定位方式施工。该方式特点是机动、灵活、挖深大、抗风浪能力强。实际应用中受到风浪流等外力影响,船位不断发生变化,为保持船位需要对绞车进行动态定位控制。文中在分析抓斗挖泥船移船绞车动态定位控制需求的基础上,采用动态定位和主动纠偏方法,建立移船绞车控制模型,提出一套动态定位控制方案。该方案能够提高船舶定位精度,增强了船舶作业对风浪流环境的适应性。
挖泥船;移船绞车;动态定位
0 引言
21世纪是海洋资源开发的新世纪,世界各国把开发海洋、发展海洋经济和海洋产业作为国家发展的战略目标。近年来我国加大对岛屿的开发与建设,大型抓斗挖泥船作为深海取料的重要装备,越来越被人们重视。抓斗挖泥船深海作业时受到定位钢桩长度限制,一般采用移船绞车定位方式施工。海上施工环境恶劣,风浪流等外力对船舶定位影响很大,简单的移船绞车控制已经不能满足施工需要,这时需要引入移船绞车动态定位技术[1]。
本文在分析抓斗挖泥船移船绞车动态定位控制需求的基础上,重点研究了动态定位控制流程、关键参数获取方法和控制系统建模,提出一套动态定位控制方案。
1 移船绞车动态定位控制概述
本文依托《工信部联装[2012]539号》文批复的“大型抓斗式疏浚工程船及抓斗设备关键技术研究”项目的船体总体设计配置进行移船定位控制技术研究。目标抓斗船移船配置为:全船配备6台1 000 kN移船绞车,船艉两侧各1台,船艏抓斗机两侧各2台。
移船绞车动态定位控制系统(以下简称“控制系统”)需要根据目标船型建立控制坐标系,利用目标船位和实时船位下移船绞车钢丝绳出绳点到锚位的钢丝绳长度变化量,控制移船绞车主动调节船位,进而达到动态控制船位目的[2]。
动态定位控制过程是绞车恒张力和自动移船的有机结合。抛锚结束后系统记下当前需要保持的船位坐标和艏向,开启恒张力模式(恒张力大小根据当前检测绞车钢丝绳张力设定)。施工环境较好时,恒张力模式即可有效保持船位。施工环境恶劣,风浪流较大时,恒张力模式下船位可能发生较大偏移,需要采用自动移船技术将船位拉回目标船位。自动移船模式下控制系统需要实时获取船体坐标、船体艏向、锚位坐标等重要数据[3]。
控制系统执行过程由动态复原和动态定位组成。动态复原主要针对周期性外力(涌浪)引起船位偏移控制。动态定位主要针对不规则性外力(风-流)引起船位偏移控制。当船位发生偏移时,系统会首先执行动态复原控制,当控制误差大于设定值时采用动态定位进行船位纠偏。
2 关键参数的获取
2.1 锚位坐标
控制系统需要获取锚位坐标用于计算船体偏移钢丝绳长度,在锚艇上安装1套GPS,抛锚结束后,将锚位通过数传电台方式无线传输给母船[4]。
2.2 钢丝绳长度
绞车收放钢丝绳长度通过安装在绞车轴上的绝对值编码器获取。考虑到系统的稳定和维护方便系统采用ELCO PAM58系列Profibus Dp总线型绝对值编码器,接入西门子PLC控制系统。
2.3 钢丝绳拉力
动态定位系统需要实时获取绞车钢丝绳的张力,为恒张力系统提供初始张力值,并在系统运行期间提供安全预警保护。移船绞车工作期间最多拉力可达1 000 kN,常规的钢丝绳拉力检测装置不能满足要求,而且大部分检测装置需要穿绳,不利于安装维护。针对项目需求设计了1套检测装置。该传感器利用的是三滚轮法(三点弯曲法)测量原理,采用电阻应变式测力传感器,测量精度高,重复性好。活动式安装,可对被测缆绳直接夹持,无需穿缆,可在不释放钢索张力的情况下,夹持于承载钢索的任何位置,测出钢索的静、动张力。安装、撤卸、使用及维护方便。滚轮安装采用高强度密封轴承,环境适应力强,在线应用,不影响走缆,输出信号可选0~5 V或4~20 mA输出,实船安装效果见图1。

图1 钢丝绳拉力传感器Fig.1Wire rope tension sensor
3 动态定位控制建模
3.1 控制系统坐标系
建立控制系统坐标系,规定船尾中心点位置为虚拟参考点。参考点位置为三维坐标系原点,原点至船首方向为x轴正方向,原点至左舷方向为y轴正方向,原点至船底方向为z轴正方向。
实际施工过程中,首先将6个锚抛入水中,并记下抛锚点的坐标。艏左1号锚(X1,Y1,Z1)、艏左2号锚(X2,Y2,Z2)、艏右1号锚(X3,Y3,Z3)、艏右2号锚(X4,Y4,Z4)、艉左锚(X5,Y5,Z5)、艉右锚(X6,Y6,Z6)根据建立的坐标系设定GPS天线在船体的安装坐标(Xg,Yg,Zg)。因为GPS安装位置相对于参考点不变,所以由GPS天线在船体的安装坐标(Xg,Yg,Zg)和船体艏向可以推算出各个绞车出缆器点坐标:艏左1号锚(XC1,YC1,ZC1)、艏左2号锚(XC2,YC2,ZC2)、艏右1号锚(XC3,YC3,ZC3)、艏右2号锚(XC4,YC4,ZC4)、艉左锚(XC5,YC5,ZC5)、艉右锚(XC6,YC6,ZC6)。由空间内两点之间的距离可以计算出6个锚到出缆器点的长度L1、L2、L3、L4、L5、L6。
3.2 控制模型
1)动态复原
动态复原模式下,抛锚结束,系统会根据当前绞车钢丝绳拉力补偿一定系数后设定恒张力值,开启恒张力模式,并记下当前各绞车岀缆器点到锚位的长度L1、L2、L3、L4、L5、L6。当外力使船位偏移时,各绞车岀缆器点到锚位的长度变为L11、L22、L33、L44、L55、L66。两次长度相减即可获得船位偏移后各个绞车的收放量,在锚位不变的情况下,系统控制各个绞车以差值长度进行反向动作,使岀缆器点到锚位的长度复原为:L1、L2、L3、L4、L5、L6。船位即可复原。但是有与外力的复杂性、系统检测误差和执行机构的累积误差,动态复原后船位误差可能较大。这时系统将启动动态定位模式,主动进行船位纠偏。
2)动态定位
当船位发生偏移,动态复原误差大于设定值时,动态定位模式启动。动态定位模式开启时系统记下了目标船位和艏向。并记录了目标船位各绞车岀缆器点坐标、锚位坐标、出缆器到锚位的长度。当船位偏移时根据偏移后GPS坐标和船体艏向,可以推算出当前船位6个绞车的目标岀缆器坐标:艏左1号锚(XC1′,YC1′,ZC1′)、艏左2号锚(XC2′,YC2′,ZC2′)、艏右1号锚(XC3′,YC3′,ZC3′)、艏右2号锚(XC4′,YC4′,ZC4′)、艉左锚(XC5′,YC5′,ZC5′)、艉右锚(XC6′,YC6′,ZC6′)。因为在不走锚的情况下6个锚的坐标是固定不变的,所以由空间内两点之间的距离可以计算出船偏移后6个锚到岀缆器的钢缆长度L1′、L2′、L3′、L4′、L5′,L6′。船位偏移示意图如图2。将计算的几个长度值代入式(1)即可获得船位偏移前后钢缆长度变化量ΔL1、ΔL2、ΔL3、ΔL4、ΔL5和ΔL6。

式中:ΔL1、ΔL2、ΔL3、ΔL4、ΔL5和ΔL6为船位偏移后钢缆长度变化量。系统控制6台绞车使钢缆长度调整ΔL1、ΔL2、ΔL3、ΔL4、ΔL5和ΔL6的长度,船位移动到目标点,首次动态定位结束。实际施工过程中由于受到风浪、钢丝绳形变及系统检测误差影响,首次定位后船位与目标船位会有误差。控制系统设定首次定位的最大允许误差,误差超限时系统默认会进行二次补偿定位,重复首次定位的过程[6]。
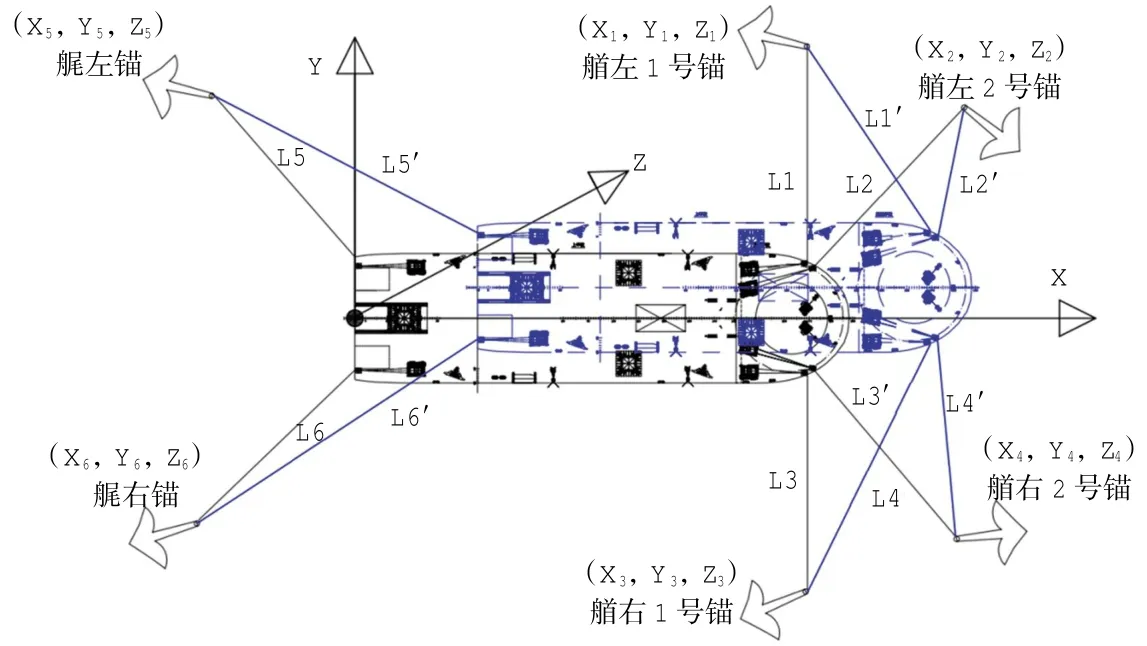
图2 坐标系及动态定位示意图Fig.2Schematic diagram of coordinate system and dynamic positioning
4 结语
本文以项目目标抓斗挖泥船为对象,分析了6台移船绞车动态定位控制原理和方法,重点研究了移船绞车动态定位控制系统关键参数的获取方法、控制流程和控制系统建模,提出一套动态定位控制方案。
[1]缪袁泉,田雨,张红升,等.抓斗挖泥船抓斗机自动控制技术[J].中国港湾建设,2014(12):47-50. MIAO Yuan-quan,TIAN Yu,ZHANG Hong-sheng,et al.Automatic control technologies for grab machine of grab dredger[J]. China Harbour Engineering,2014(12):47-50.
[2]魏辽国,叶勇,石康,等.新型移动式移船定位绞车的应用[J].船舶标准化工程师,2015(1):56-58. WEI Liao-guo,YE Yong,SHI Kang,et al.Application of new movable type mooring position winch[J].Ship Standardization Engineer, 2015(1):56-58.
[3]胡斌.工程船定位移船系统设计探讨[J].广东造船,2014(4):62-64,61. HU Bin.Mobile mooring system of engineering ship[J].Guangdong Shipbuilding,2014(4):62-64,61.
[4]张红升,缪袁泉,闻峣,等.绞吸式挖泥船三缆定位控制系统设计[J].机电设备,2014(3):56-58. ZHANG Hong-sheng,MIAO Yuan-quan,WEN Yao,et al.Design of Christmas Tree control system for cutter suction dredger[J]. Mechanical and Electrical Equipment,2014(3):56-58.
[5]张媛.遗传算法优化模糊控制器的工程船舶控制方法的研究[D].武汉:武汉理工大学,2005. ZHANG Yuan.Research on using genetic algorithm to optimize fuzzy controller on ship′s controller[D].Wuhan:Wuhan University of Technology,2005.
[6]汪鑫.基于串联造船的无装置移船定位精度控制[J].科技创新导报,2010(16):103. WANG Xin.Accuracy control of shipless positioning based on tandem shipbuilding[J].Science and Technology Innovation Herald, 2010(16):103.
Dynamic positioning control technology of shifting winch for grab dredger
ZHANG Hong-sheng
(CCCC National Engineering Research Center of Dredging Technology and Equipment Co.,Ltd.,Shanghai 201208,China)
The deep sea operation of grab dredger is limited by the positioning steel pile length,generally uses the shifting winch to moving the ship.The way is characterized by mobility,flexibility,digging deep,strong ability to resist wind and waves. As against the wind,waves and flow of practical application,and many other forces outside,the ship position changed constantly,in order to maintain the position,it is needed for dynamic positioning control of winch.Based on the analysis of the dynamic positioning control requirements of the Grab dredger,we used the dynamic positioning and active correction method to establish the control model of the ship winches and put forward a set of dynamic positioning control scheme.The scheme can improve the accuracy of ship positioning,and enhance the adaptability of ship operation to wind,waves and flow environment. Key words:dredger;shifting winch;dynamic positioning
U615.351
A
2095-7874(2017)07-0069-03
10.7640/zggwjs201707016
2017-02-28
2017-04-21
工信部国家年度重大装备专项资金项目
张红升(1983—),男,上海市人,工程师,从事疏浚船舶自动化监控系统设计研究工作。E-mail:81673740@qq.com
猜你喜欢
交通信息与安全(2020年3期)2020-11-13 02:00:32
中国水产(2019年9期)2019-10-16 01:32:14
工业设计(2016年7期)2016-05-04 04:02:05
设备管理与维修(2016年5期)2016-03-16 02:20:48
船海工程(2015年4期)2016-01-05 15:53:50
同煤科技(2015年4期)2015-08-21 12:51:04
世界海运(2015年7期)2015-04-05 15:49:04
广东造船(2015年6期)2015-02-27 10:52:45
河南科技(2014年24期)2014-02-27 14:19:41
河南科技(2014年12期)2014-02-27 14:10:35
