
基于ModelCenter的顶置武器站稳定精度优化
2017-08-07 14:23毛保全梁博巍
火力与指挥控制 2017年6期
邓 威,毛保全,梁博巍,宋 鹏
(装甲兵工程学院,北京 100072)
基于ModelCenter的顶置武器站稳定精度优化
邓 威,毛保全,梁博巍,宋 鹏
(装甲兵工程学院,北京 100072)
顶置武器站具有系统组成类型复杂、子系统间存在耦合作用的特点,导致多学科协同仿真的优化模型难以建立。通过Adams、Simulink分别建立了顶置武器站机械系统及控制系统模型,并在多学科优化设计平台ModelCenter中对该机电联合仿真模型进行系统集成;在此基础上,以顶置武器站稳定精度为目标函数,采用一阶差分模型对炮控系统比例系数及积分系数进行了灵敏度分析,并采用设计探索优化器对该参数进行了优化设计。仿真结果表明,所建立的顶置武器站稳定精度多学科协同优化模型设计周期短、计算效率高,为下一步进行顶置武器站多工况、多结构参数的优化设计提供技术支撑。
顶置武器站,稳定精度,多学科协同仿真,优化设计
0 引言
顶置武器站是可配备多种武器和不同组合的火力控制系统,可搭载于不同军用车辆及平台的模块化武器系统[1]。目前国内研发武器站已完成了演示验证,并于“十二五”期间开展定型试验。顶置武器站采用了多武器共平台发射技术、高精度双轴稳定技术、全数字控制驱动技术、高速调炮技术等一系列先进技术,使武器平台具备了高精度射击和变射速连发射击的能力。与此同时,武器站系统组成的复杂性也造成了炮控系统工作过程的复杂性,增加了工程人员分析稳定精度的研究难度。
以往在对机电一体化系统进行仿真分析时,主要是利用不同的CAE软件对分系统进行单独仿真,然后再进行综合分析,研究效率及精度低下。近年来,随着仿真技术的发展,涌现出了多种先进的系统集成工具,大大提高了多学科协同仿真效率,为机电一体化系统的联合仿真及优化提供了有效的手段。文献[2]利用ISIGHT平台开发了集Adams动力学仿真、Ansys静力学仿真以及Matlab控制系统仿真于一体的机电液联合仿真模型;文献[3]基于ModelCenter对顶置武器站三维模型、有限元模型以及刚柔耦合动力学模型进行系统集成,建立了总体结构参数优化模型,并采用多目标遗传算法对其进行优化。以上研究成果表明,基于多学科协同仿真的优化平台已日趋成熟,为复杂系统的联合仿真及优化提供了切实可靠的技术途径。
本文基于ModelCenter平台对武器站的机电联合仿真模型进行系统集成与优化。其中,采用Adams构造顶置武器站刚柔耦合多体动力学模型,采用Simulink构造控制系统模型,并将Simulink作为主体仿真环境,在仿真过程不断调用Adams构造的机械系统模型。最后在ModelCenter中对控制系统进行封装,由ModelCenter中提供的试验设计功能对该武器站的机电联合仿真模型进行灵敏度分析及优化设计。
1 构建武器站模型
某型顶置武器站主要由30 mm链式自动炮、缓冲簧、摇架、支撑架、耳轴、托架、弹箱、观瞄装置等部件组成[4],如图 1 所示。
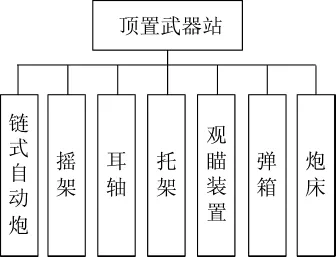
图1 顶置武器站结构组成
其中,自动机在摇架与支撑架的共同限制下进行往复运动,摇架则通过左右对称的耳轴轴承相对于托架进行俯仰运动,左耳轴末端固定有弹箱,右耳轴则固定有观瞄装置。高低机安装于左托架内,通过齿轮与摇架齿弧的啮合控制着整个起落部分的俯仰角度;托架安装于炮床上,炮床与上座圈固连,底盘顶端与下座圈固连,上下座圈通过滚珠实现相对转动;方向机安装于炮床上,通过齿轮与炮床外齿弧的啮合控制着整个回转部分的方位角度。
基于上述假设,将该武器站处理为刚柔耦合多体模型,其中,身管、弹丸、支撑架、耳轴、托架等16个部件处理为柔性体,剩余部件如摇架、缓冲簧、弹箱、并列机枪等处理为刚性体,共包含3个旋转副、15个固定副、1个平移副以及5个接触副,拓扑关系如图2所示。

图2 武器站拓扑关系简化图
以往在对炮控系统进行稳定精度试验时,由于实际条件的限制,往往在室内采用多自由度摇摆台的方法来进行试验。该方法将武器站安装在摇摆台上,由工程人员设定输入激励来实现实车行进间路面激励的模拟,同时,还需要在身管上固定一个激光发射器,以及距离炮口一定距离的正前方设定一个目标靶板(同时也是激光检测器),通过测定激光光斑在目标靶板的投射偏差,即可计算出在该激励下武器站的稳定精度,如图3所示:

图3 稳定精度摇摆台试验方法
根据上述试验过程,在武器站多体动力学仿真环境下,建立稳定精度试验条件时,作出如下模拟及简化:
①摇摆台由通用点驱动(Point Motion)配合平移副(Translational joint)来模拟实现,激励信号则直接在通用点驱动中输入,根据实际摇摆台模拟中等起伏路面上行驶状态时输入的激励,设定通用点驱动的输入信号为峰值25 mm、频率为0.6 Hz的正弦信号,如图4所示:
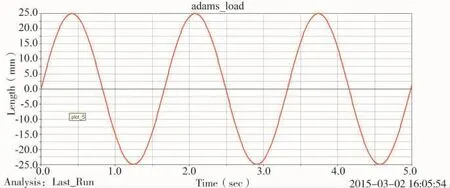
图4 激励信号
②考虑到摇摆台在垂直、水平两个方向上的激励相互独立,而且武器站炮控系统稳定身管的垂直向、水平向的作用过程类似,因此,本文在摇摆台激励建模及武器站炮控系统建模中,只考虑垂直方向。
2 建立控制系统模型
某型顶置武器站炮控系统主要包括伺服传动机构、位置传感器、速度陀螺仪、高低向功率放大器、高低向直流电机、水平向功率放大器以及水平向直流电机等。当武器站进行行进间射击时,由于路面的起伏形成振动激励,身管的空间指向发生偏移,在稳定工况的作用下,炮控系统通过角速度陀螺仪产生与偏移量成比例的电信号,并经由相敏整流器、积分器、综合放大器等控制器的处理形成系统控制信号,并输送到功率放大器中进行脉宽调制处理,直接驱动高低机/方向机输出扭矩(高低机作用于摇架齿弧,方向机齿轮作用于上座圈外齿弧),使得身管朝相反的方向转动,最终实现对身管偏移角度的补偿,其作用机理如图5所示(以高低向为例)[5]:

图5 炮控系统稳定工况作用机理
在上述稳定工况的作用过程中,综合控制信号的形成采用了基于角速度偏差的PI控制,其原理如图6所示:
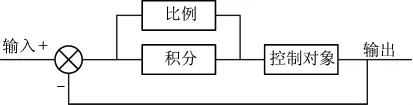
图6 PI控制原理图
根据系统的角速度偏差信号,利用比例及积分两种方式计算出综合的控制量。控制量的计算由以下公式得出:
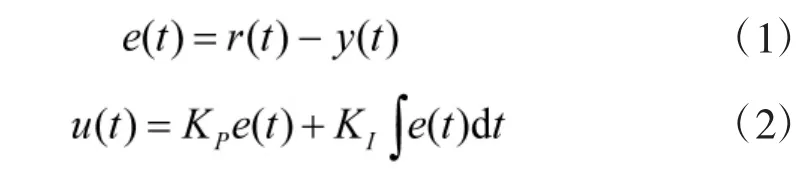
其中,e(t)为偏差值,r(t)为给定值,y(t)为实际输出值,u(t)为综合控制量,KP为 PI比例系数,KI为 PI积分系数。
根据上述分析,在Simulink中建立顶置武器站炮控系统框图,如图7所示:

图7 炮控系统控制框图
其中,控制系统的输入为武器站身管相对于耳轴的偏差角速度,即在Adams中定义的身管局部坐标系相对于耳轴基准坐标系的角速度偏差;输出的综合控制信号则直接输入到Adams中定义在摇架齿弧上的单分量力矩值,即相当于高低机输出的扭矩值。为了下一步进行控制参数的灵敏度分析及优化设计,这里将PI控制器的比例系数及积分系数进行参数化处理,分别为P、I。
3 在ModelCenter中系统集成
Phoenix Integration公司开发的ModelCenter是一种具有良好开放性、功能强大的多学科协同设计集成优化平台,支持Adams、Matlab、Ansys等多种不同学科的CAE软件。基于该平台,用户可以充分利用ModelCenter提供的分布式建模及优化分析功能,进行复杂系统的设计[6]。
在本文构建的顶置武器站机电联合仿真模型中,由于Adams是作为一个子模块集成到Simulink的控制框图中,因此,只需在ModelCenter中对Simulink的控制框图进行封装调用即可,三者的结构关系如下页图8所示。
在Modelcenter中添加Matlab模块后,需要作以下处理:
①在ModelCenter中,因为包含有Matlab的插件接口,所以可以直接支持Matlab的*.m文件的调用或代码的编辑,但不直接支持Simulink的*mdl文件,需要使用命令行调用*.mdl文件,即在系统添加Matlab插件后,添加以下关键代码:

图 8 Adams、Simulink、ModelCenter三者关系
Run dw3
sim('dw3_pid.mdl',5)
其中,dw3是由Adams通过控制模块导出的*.m文件,它包含了控制模块的初始化信息,该信息必须提前加载于控制系统的运行;dw2_pid.mdl则是在Simulink建立的控制框图,其后的数字5为设定的仿真时间。
②根据国军标规定,炮控系统稳定精度由以下公式计算得出[7]:

其中,α为稳定精度统计值,αi为各个样本的偏差值为样本的算术平均值,n为样本个数。
为了将上述公式程序化,需要在ModelCenter的Matlab模块中添加以下代码:

其中,数组angle[]是身管相对于耳轴的角度偏差值,由角速度偏差积分而来;result是计算出来的稳定精度。
③为了下一步进行灵敏度分析及优化设计,在ModelCenter中构建变量Gain_P、Gain_I,并添加以下代码:
P=Gain_P
I=Gain_I
其中,P即为前期建立控制框图中的参数化的比例系数,I则为积分系数。
4 灵敏度分析
PI控制器参数比例系数和积分系数选取的合理与否,直接关系到控制效果的优劣,而且对高低机的扭矩需求也有很大的影响,因此,有必要对其进行灵敏度分析,比较两者对稳定精度的影响。
灵敏度是目标函数对设计变量的敏感程度,即目标函数和约束函数对设计变量的偏导数[8],通过灵敏度分析,可以准确评估各参数对系统性能的影响。灵敏度分析方法一般有一阶差分法、伴随变量法、直接微分法等,本文采用一阶差分法的灵敏度计算模型[9]:

其中,f()表示因变量,x表示自变量,△x表示取一个步长后x的变化量。
选择自变量为控制器的比例系数及积分系数,因变量为稳定精度,得出灵敏度仿真结果如图9、下页图10所示。
从总体来看,由图9可知,稳定精度基本上与两个自变量成反比关系,即随着比例系数及积分系数的增大,稳定精度变小,控制效果越好。
从个体来看,由图10可知,两个自变量对于稳定精度的影响程度是截然不同的,相比起积分系数的变化,比例系数的变化对稳定精度的影响要明显剧烈的多,因此,在对控制器进行结构设计时,要严格控制比例系数的量值。
然而,若是不考虑实际因素(如电机的额定扭矩),而只追求最小稳定精度的目标时,只需无限地增大两参数即可。但实际上,增加这两个控制器的系数,同时会增大输出扭矩,而输出扭矩并不能一味地增加,直接会受所用电机的额定扭矩限制。因此,有必要寻求一种最优的控制系统参数配置,使得炮控系统在满足扭矩约束的前提下,稳定精度达到最小。
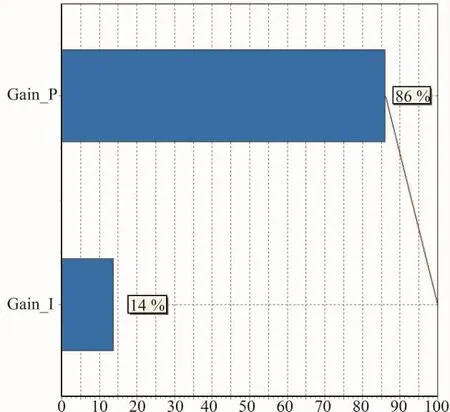
图10 稳定精度影响因素灵敏度分析
5 优化设计
ModelCenter内部提供了多种优化工具,其中,设计探索优化器(Design Explorer)综合了梯度优化技术(Gradient Optimization)、代理模型(Surrogate Models)以及试验设计(DOE)等技术,不仅能够对设计空间进行有效的系统化采样分析,而且在优化的过程中智能化地运用代理模型进行迭代计算,大大提高了优化的效率[10];此外,还特别适合求解由离散或连续设计变量定义的全局优化问题。因此,本文选择其作为顶置武器站炮控系统参数的优化工具。
5.1 设计变量
选择之前所定义的Gain_P、Gain_I作为设计变量,分别代表了炮控系统PI控制器的比例系数、积分系数,取值范围均定为[10,500]。
5.2 约束条件
改型顶置武器站高低机的额定扭矩为16.5 Nm,即控制系统的输出需满足:0≤Torque≤16.5。
5.3 目标函数
选择最小化(Minimize)作为稳定精度变量result的优化目标。
5.4 优化结果
对上述顶置武器站炮控系统优化模型进行仿真,计算过程总共进行了52次迭代,耗时7 min,优化结果如表1所示。
从表1中可以看出,比例系数Gain_P的优化结果是91.35,积分系数Gain_I的优化结果是497.13,两者相差一个数量级,这也是符合灵敏度分析中得出的严格控制比例系数量值的结论的。此外,虽然稳定精度最终的优化结果是1.56 mil,相比起初值0.69 mil要大,但这是考虑了电机额定扭矩的优化结果,具有真实性、可靠性,对工程实际更具有参考价值。
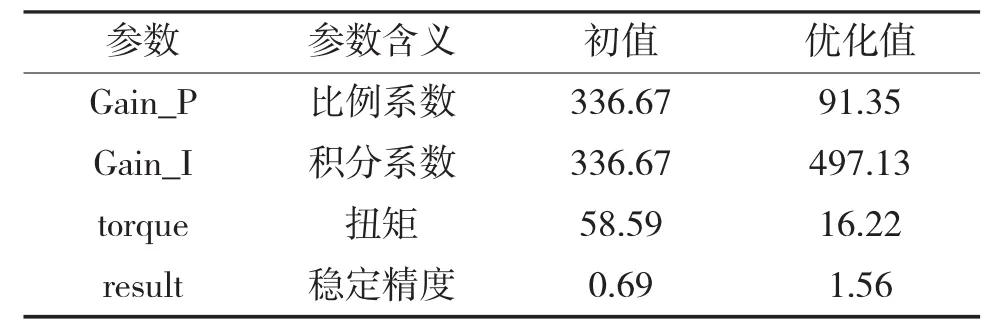
表1 优化设计仿真结果
6 结论
本文通过Adams、Simulink等CAE软件构建了顶置武器站稳定精度机电联合仿真模型,并基于多学科优化设计平台ModelCenter对该模型进行灵敏度分析及优化设计。结果表明基于多学科协同仿真的顶置武器站稳定精度优化模型设计周期短、可靠性高、通用性强,具有一定的理论参考价值,为下一步进行顶置武器站行进间连发射击的稳定精度优化提供技术基础。
[1]毛保全,邵毅.火炮自动武器优化设计[M].北京:国防工业出版社,2007.
[2]朱德泉.基于联合仿真的机电液一体化系统优化设计方法研究[D].合肥:中国科学技术大学,2012.
[3]毛保全,徐礼,吴永亮,等.遥控武器站总体结构参数优化研究[J].装甲兵工程学院学报,2012,26(5):43-46.
[4]吴永亮,毛保全,高玉水,等.基于立靶密集度的小口径连发武器炮口振动参数控制模型[J].火炮发射与控制学报,2013,35(3):6-9.
[5]朱竞夫,赵碧君,王钦钊.现代坦克火控系统[M].北京:国防工业出版社,2003.
[6]陈鹏飞,王彦伟.基于ModelCenter的精密气浮工件台系统建模与参数优化[J].组合机床与自动化加工技术,2014,56(4):26-29.
[7]国防科学技术工业委员会司令部.GJB6361-2008装甲车辆火控系统定型试验规程[S].北京:中国标准出版社,2006:2046-2048.
[8]毛保全,邵毅.火炮自动武器优化设计[M].北京:国防工业出版社,2007.
[9]马春茂.高炮结构参数对炮口振动影响的分析[J].兵工学报武器分册,1992,14(2):24-27.
[10]徐礼,毛保全,徐振辉,等.遥控武器站射击密集度分析平台开发[J].火炮发射与控制学报,2012,34(3):18-22.
Stabilization Accuracy Optimization of Overhead Weapon Station Based on ModelCenter
DENG Wei,MAO Bao-quan,LIANG Bo-wei,SONG Peng
(Academy of Armored Force Engineering,Beijing 100072,China)
The Overhead Weapon Station(OWS)has a system composed of complex types,and its interactive subsystems make it difficult to establish the optimization model of multidisciplinary collaborative simulation.In this paper,Adams is used to establish OWS mechanical system model and Simulink to the control system model,which are integrated in multidisciplinary design optimization platform ModelCenter.What’s more,taking OWS stabilization accuracy as objective function,the first order difference model is used in sensitivity analysis of control system proportion coefficient and integral coefficient.Based on design exploration tool,optimization design of the parameters is carried out.The simulation results show that,the multidisciplinary collaborative optimization model of OWS stabilization accuracy has a short design period and high calculation efficiency,and provides technical support for optimization design of OWS multi conditions and structural parameters.
overhead weapon station (OWS),stabilization accuracy,multidisciplinary collaborative simulation,optimization design
TJ203
:A
10.3969/j.issn.1002-0640.2017.06.022
2016-05-19
:2016-06-29
邓 威(1986- ),男,广东湛江人,博士生。研究方向:车载武器系统集成与动态仿真。
1002-0640(2017)06-0096-05
猜你喜欢
现代电力(2022年2期)2022-05-23
家庭影院技术(2021年3期)2021-05-21
Journal of Geriatric Cardiology(2021年1期)2021-03-03
航天工业管理(2020年9期)2020-12-28
科技传播(2019年22期)2020-01-14
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年5期)2017-11-23
小哥白尼·军事科学画报(2017年3期)2017-06-12
少儿科学周刊·儿童版(2016年2期)2016-03-19
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20
