
一种无线智能追踪监控操作工业机器人的研究∗
2017-08-01 13:49吴阳明尹晓丁吕闪金巳婷
计算机与数字工程 2017年7期
吴阳明 尹晓丁 吕闪 金巳婷
(大连交通大学电气信息学院大连116028)
一种无线智能追踪监控操作工业机器人的研究∗
吴阳明 尹晓丁 吕闪 金巳婷
(大连交通大学电气信息学院大连116028)
论文通过可控的行动底盘为载体,通过无线WiFi视频传输技术将视频实时传输到电脑和手机的显示终端,通过对显示终端地操作,能实时有效控制行动载体的实时状态,加入的GPS可以实时地定位行动载体的地理信息,如海拔、经纬度、速度等。其中也有检测的传感器,实时检测当时环境的一些指标:瓦斯浓度,火警遇险,气象等,并通过LCD显示终端显示出来相应的数据信息,实时可靠。论文论述的是一个综合性的工业机器人,可以随意实时地控制,体现的是实时的人机交互系统,多功能、多应用是论文设计的主要特点。
WiFi无线技术;GPS技术;实时;多功能工业机器人
Class NumberTP391.44
1 引言
随着时代的发展和科技的进步,机器人成为了世界发展的潮流之一,它代替着人类做着一些重复复杂的工作。机器人技术的研究已从传统的工业领域扩展到医疗服务、教育娱乐、勘探勘测、生物工程、救灾救援等新领域,并快速发展[1]。经过五十多年的发展,工业机器人已在越来越多的领域得到了应用。在制造业中,尤其是在汽车产业中,工业机器人得到了广泛的应用[2]。换言之这是一个机器人的时代,我们需要它为人类工作,人类从而有更多的精力去做一些别的事情,机器人不仅为我们带来先进的生产力,也为我们带来了技术上的革新换代,本文会详细地论述一款全新的工业机器人模型,也给未来的机器人制造做一些理论和现实的依据,结合现实生活中的情况,研制人类生活中需要的机器人。此款工业机器人在实际的工作中充当一个机械的作用,也可在野外探险,救助方面起到作用。它的特点是通过WiFi传输的协议使得机器人能很快地改变工作程序,能实现重复操作,也可在批量生产中获得广泛的应用,其可利用无线数传系统对机器人运动姿态进行精确控制,图像的实时显示,能够实现GPS的精准定位,在野外救助起到很大作用。
2 系统的整体框架和设计思路
本设计的基本框架如图1所示,整个功能是基于行动载体来实现的,这样既能够更快更好地移动位置,也能够更好地实现人机操作,达到一个精准定位、实时控制的目的。人机交互的循环使用更能够实时地反映当时的实时状态,使得通过载体把GPS和WiFi技术融合起来,得到一个精确的控制。对于检测部分的环节,需要把所有的检测信息都能够无失真的还原到显示终端上。这样就能够实时地检测到当前的环境质量等因素,为后续的工作提供了一个实时的环境检测,充分满足了实时检测的条件。

图1系统的整体功能框图
3 系统的硬件组成结构
1)本设计采用的是ST公司设计的一款芯片STM32F103RC,程序存储器大小为512 KB,存储器容量为64KB,处理器速度为72MHz,此款处理器具有功耗低,内核响应处理数据速度快等优点,满足日常一般功能的开发需求,其最小系统原理图如图2所示。
2)本设计采用BTN7971的电机驱动,BTN7971是英飞凌公司推出的一款应用于汽车空调调速上的工业级芯片,内部集成了一个上桥臂沟道和一个下桥臂沟道[3]。
BTN7971电机驱动的参数有:
*输入电压:7.2V~12V;
*驱动电流:0~50A,峰值70A;
*工作频率:0~25KHz(推荐3KHz~10KHz);
*工作温度:-5℃~75℃。
BTN7971电机驱动的特点有:
*双BTN7971大电流H桥驱动;
*双电机驱动,两个全桥;
*与单片机5V隔离,有效地保护了单片机;
*带有驱动使能开关。

图2STM32F103RC最小系统
3)带有视频传送的WiFi路由模块:
此模块为WiFi数传模块-64M,具有RX,TX,GND三条线,用来收发指令,此模块是通过WiFi网络拓扑结构BSS进行无线传输命令,通过摄像头采集的图像信息也是通过此模块传输,获取到显示终端。WiFi可以提供热点覆盖、低移动性和高数据传输速率,无线接入和高速传输是WiFi技术的主要特点[4]。综合成本低,该技术使用的是2.4GHzISM频段尚属无需许可证即可使用的无线频段,节省了很大的授权成本[5]。
WiFi技术是采用网络拓扑结构BSS,这种网络的工作站之间不需要经过授权与认证就可以直接通信,但是要求两者距离在直接通信的范围之内。这种网络具有地位等同、动态结构、灵活性好、和高可靠性等优点[6],如图3所示。

图3WiFi的BSS网络拓扑结构
所需要的视频图像是通过WiFi路由协议传输到显示终端,以便人为的观察,从而更好地控制工业机器人实时的姿态,WiFi路由接收到指令后作出相应的判断,进行姿态调整。
4)GPS模块:
目前,它在航空、航天、军事、交通、运输、资源勘探、通信、气象等几乎所有的领域中都被作为一项非常重要的技术手段和方法,充分显示了这一卫星定位技术的高精度与高效益[7]。本设计采用的GPS模块型号为NEO-6M UBLOX,有四个端口,分别是VCC、GND、RX、TX。此款GPS模块通电后可以自行接收数据,采用的是一种通过NMEA协议进行译码,后通过无线系统将信息完整地还原到显示终端上。本设计采用的GPS能够定位在6到7个卫星,所显示的定位结果较为准确,能够显示具体的坐标和运动状态。美国国家海洋电子协会(Nation⁃al Marine Electronics Association,NMEA)为海用电子设备制定的标准协议格式,目前已经成为了GPS导航设备统一的RTCM标准协议[8],GPS原理图如图4所示。

图4NEO_6 GPS原理图
本文采用的是差分GPS定位系统,其工作过程是在用户接收机附近设置一个已知精度坐标的差分基准站,基准站的接收机连续接收导航信号,将测得的位置或距离数据与已知的位置、距离数据进行比较,确定误差,得出准确改正值,然后将这些改正数据通过数据链发播给覆盖区域内的用户,用以改正用户的定位结果[9]。
GPS卫星的定位原理是空间后方交会,GPS卫星星座作为空间状态已知点,其位置由卫星发射的导航电文给出。以GPS卫星与接收机天线之间空间距离为基本观测量,根据已知的卫星瞬时坐标即能确定用户接收机所在点位的三维坐标[10]。
4 系统关键技术工作流程运作及创新点论述
在此系统中,其工作流程是对接收的指令进行精确合理的处理,这需要对系统核心控制器进行算法编程,其关键技术设计如图5所示。
通过WiFi路由接收到的指令,内核接收到指令后,其操作相应的寄存器,从而触发定时器产生中断,这里通过触发产生跳变沿输出比较PWM波形,调节输出通道和占空比等参数,可以实时地对其动作的精准控制,从而达到工作的需求,其工作流程如图6所示。
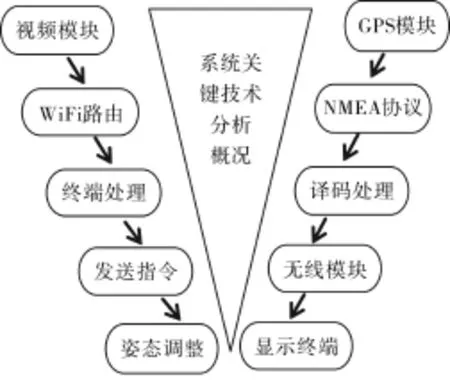
图5系统关键技术的算法设计
本设计在于把日常生活中普遍的技术应用到工业当中,是把WiFi技术和GPS技术相融合,以此为基础来传输信息和实现定位的功能,对定时器程序的调用编程设置命令,再通过WiFi传输命令实行反馈命令进行姿态控制。在无人监管的情况下,可以通过GPS技术将具体的位置信息实时地反馈回来,特别适用于野外探险和救助方面,此两款技术目前来说非常容易获得,所以应用起来非常的方便,也可以节省很多资源,并且改善信息获取的不精确问题。

图6系统工作流程运作原理框图
5 结语
此系统设计经过验证是完全可以实现的,可为后期大型工业机器人的开发做一个理论铺垫和现实指导。此款工业机器人可采取多种多样的主控,功耗低,传输信号稳定,能够实时反馈,这些是最关键的因素,但最终需要做成大型机器实体还需要很多的机械因素,在工作过程中的环境因素等等。如何使得WiFi和GPS两者技术相融合,使得两者互相辅助,两者的传输过程中抗干扰能力更强,能够让此功能变得更完善,进行实时的匹配,又能够在一定的程度上相互补充信息,也是后续所研究的方向。为更多的工业机器人做到实时反馈和控制而努力。
[1]谭民,王硕.机器人技术研究进展[J].自动化学报,2013,39(7):963-972. TAN Min,WANG Shuo.Advances in robotics research[J].Automation University,2013,39(7):963-972.
[2]张红霞.国内外工业机器人发展现状与趋势研究[J].电子世界,2013(12):5. ZHANG Hongxia.Status Quo and Development Trend of domestic in the foreign industrial robot[J].Electronic World,2013(12):5.
[3]江哲.基于STM32的四旋翼飞行器的设计与实现[D].上海:华东理工大学,2015. JIANG Zhe.Design and implementation of a four-rotor STM32 based[D].Shanghai:East China University of Technology,2015.
[4]陈文周.WiFi技术研究及应用[J].数据通信,2008(2):14-17. CHEN Wenzhou.WiFi technology research and applica⁃tion[J].Data Communication,2008(2):14-17.
[5]潘立波.基于WIFI技术的无线定位算法研究与实现[D].杭州:浙江大学,2013. TAN Libo.Research and Implementation of Wireless Loca⁃tion Algorithm WIFI technology[D].Hangzhou:Zhejiang University,2013.
[6]张利.基于WiFi技术的定位系统的设计与实现[D].北京:北京邮电大学,2009. ZHANG Li.Design and Implementation WiFi positioning system technology[D].Beijing:Beijing University of Posts and Telecommunications,2009.
[7]王瑞.GPS基线精度分析及控制网的方差分量估计研究[D].南京:河海大学硕士论文,2005. WANG Rui.Research on GPS baseline accuracy analysis and variance component estimation of control network[D]. Nanjing:Hehai University,2005.
[8]李准.基于TI DM6446处理器的公交车载调度终端软件设计[D].杭州:浙江工业大学,2013. LI Zhun.TI DM6446 processor bus terminal car schedul⁃ing software design[D].Hangzhou:Zhejiang University of Technology,2013.
[9]黄智慧.厦门某国际货柜码头物流调度优化方法研究[D].南京:南京航空航天大学,2009. HUANG Zhihui.Research on logistics scheduling optimi⁃zation method for an international container terminal in Xiamen[D].Nanjing:Nanjing University of Aeronautics &Astronautics,2009.
[10]过家春.GPS技术在桥梁变形监测中的应用研究[D].合肥:合肥工业大学,2010. GUO Jiachun.Application of GPS technology in bridge deformation monitoring[D].Hefei:Hefei University of Technology,2010.
Research on A Wireless Tracking and Monitoring the Operation of Intelligent Industrial Robots
WU YangmingYIN XiaodingLV ShanJIN Siting
(College of Electrical Information,Dalian Jiaotong University,Dalian116028)
Regard the action by controlled chassis as the carrier,through a wireless WiFi video transmission technology re⁃al-time video can be transmited to the computer and mobile display terminal,by operating the display terminal,it can effectively control the real-time operations support real-time status,the added GPS real time can position action carrier geographic informa⁃tion,such as altitude,latitude and longitude,speed and so on.Which also has a sensor detection,real-time detection when some environmental indicators:gas concentration,fire distress,weather,and through LCD display terminal displays the corresponding data,real-time and reliable.In this paper,a comprehensive industrial robots is analyzed,it can be freely controlled in real time,reflecting the real-time interactive systems,multi-function,multi-application is the main feature of this paper design.
WiFi wireless technology,GPS technology,real-time,versatile industrial robot
TP391.44
10.3969/j.issn.1672-9722.2017.07.023
2017年1月3日,
2017年2月19日
吴阳明,男,硕士,研究方向:嵌入式技术、移动通信技术。尹晓丁,男,硕士,研究方向:研究方向:嵌入式技术。吕闪,女,硕士,研究方向:嵌入式技术、通信及关键技术。金巳婷,女,硕士,研究方向:嵌入式技术、通信及关键技术。
猜你喜欢
建材发展导向(2021年18期)2021-11-05
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
无线互联科技(2021年4期)2021-04-21
家庭影院技术(2020年12期)2021-01-18
导航定位与授时(2020年5期)2020-09-23
中国外汇(2019年20期)2019-11-25
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
