
基于视觉和力反馈的机器人研抛联合控制分析
2017-07-31 19:00房书民
长春大学学报 2017年6期
于 淼,房书民
(长春大学机械与车辆工程学院,长春130022)
基于视觉和力反馈的机器人研抛联合控制分析
于 淼,房书民
(长春大学机械与车辆工程学院,长春130022)
利用视觉传感器和力传感器融合技术对机械手研抛进行联合控制分析。研究过程中,通过视觉传感器引导,确定加工点和加工轨迹,再与力控制相结合达到加工目的,即是视觉伺服与力混合控制。在混合控制模型中,本实验采用基于图像的视觉伺服与力反馈融合的控制算法解决视觉与力之间的协调问题。
联合控制;视觉伺服;力反馈;视觉与力混合控制
0 引言
在表面精密研抛加工行业中,相对于数控机床而言,工业机器人具有作业空间大、操作灵活、价格低廉等优势,所以应用范围越来越广泛。在机器人研抛加工过程中,不仅要保证接触面间作用的恒定,还要对机械手的末端不断调整位置。其主要的过程是利用双目摄像机找到研抛工件上的作业点,再通过视觉与力反馈技术融合达到作业目的,即视觉伺服与力反馈联合控制,这是当今机器人控制技术领域研究的重点之一[1]。
本文研究视觉和力反馈联合控制下的机械手研抛问题,利用力传感器和双目摄像机构建视觉和力反馈联合控制模型。本实验中采用基于图像的视觉伺服与力反馈相结合的控制算法[2]解决视觉与力控制之间的协调问题;利用视觉图像来确定视觉范围内工件表面作业点和研抛路径规划,以及对机械手末端工作点的捕捉、跟踪和接触,通过视觉伺服和力反馈技术融合来完成作业任务。本试验系统的总体结构如图1所示。因此,本实验需要建立视觉和力联合控制模型。

图1 双机器人协调研抛控制系统总体结构

图2 双目视觉下的三维坐标测量模型
1 双目视觉坐标标定
如图2所示,在两机械臂对工件进行研抛加工时,双目摄像机为研抛工具提供研抛点,且在研抛工程当中,双目系统也能够为研抛工具提供加工轨迹。所以,首先要用双目视觉对工件上一点进行坐标标定。如图2所示,双目摄像机对P点进行观察,则P点投影在摄像机两图像平面上分别为P1和P2,从图上可以看到空间点P为OLCP1和ORCP2的交点,该点位置唯一确定。
在双目视觉坐标测量模型中,左右摄像机的内参数完全形同,左右两摄像机坐标系的原点OLC和ORC分别为两摄像机的光心,XC轴方向为两光心连线方向,光心之距为b,称作基线,ZC轴(摄像机光轴)平行,YC轴垂直于XCZC平面,两摄像机焦距均为f。假设左摄像机与世界坐标系重合,P点在左右两摄像机成像平面的投影分别为P1和P2,则P1和P2的Y坐标相同,X坐标不同,记作XL和XR。由几何学原理可以得到公式(1):

用计算机图像像素坐标表示为:

点P的左右视觉视差用d=ul-ur表示,式(2)中,只要有双目摄像机的内参数uo,vo,fx,fy,视觉范围内任意点的三维坐标都可以求出[3]。
2 机器人运动学分析
首先,以一个机械手作为模型,其基座为基点建串联机器人的六自由度坐标系,如图3所示。
在本实验中,机器人末端研抛工具的轴线与机器人末端轴线平行,两轴线间的距离为75mm,由坐标系之间坐标齐次变换可知研抛工具的位姿可表示为:

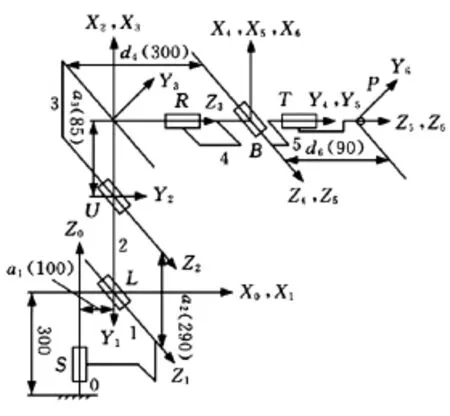
图3 六自由度串联机器人坐标系
上式中,p=[75nx+px75ny+py75nz+pz]为研抛工具末端研抛点在基坐标系(UCS)中的坐标[4]。根据原点移动的坐标变换公式:

公式中πB=p=[75nx+px75ny+py75nz+pz],bA是UCS原点在WCS下的坐标向量,QA为WCS到UCS的旋转矩阵,由此公式可求得机械手研抛工具在WCS下的坐标[5]。
3 双目视觉与力传感器联合控制模型
进行实验前,我们通过双目摄像机对工件表面上一点进行定位,确定该点在世界坐标系中坐标,再通过计算机通知机械臂末端的磨削工具移动至该点进行研抛。在研抛过程中,双目视觉为机械臂提供最优的加工路径,力传感器所测量研抛工具作用力的变化也反馈给计算机,再经Kalman滤波调整研抛工具的位置和姿态。
首先,建立力反馈系统的状态方程和测量方程[6-7]:

上式中:φk,k-1是tk-1到tk时刻的转移矩阵;Γk-1为系统的噪声驱动矩阵;Hk为系统的测量矩阵;Vk为测量噪声矩阵;Wk为系统激励噪声序列。同时Wk和Vk满足下列关系:

上式中:Qk为系统状态噪声方差矩阵(非负定);Rk测量噪声方差矩阵(正定)。
假设我们对力传感器测量力的估计Xk和测量Zk满足式(5),系统噪声Wk和测量噪声Vk满足式(6),且Qk非负定,Rk正定。时刻tk的测量值为Zk,则Xk的估计值可按下式求解:

公式7为随机线性离散Kalman滤波基本方程,只要有t0时刻两个Kalman任意初始值X∧0和P0,tk时刻的测量值Zk,就能够计算出tk时刻的状态估计值X∧k(k=1,2,ƻƻ)。假设机械手末端磨削工具对工件表面的理想作用力为8N,模拟200个测量值(图4虚线),其均值为8N,加入了标准偏差几牛顿的高斯白噪声(图4点划线),现在本实验选定X∧0=2N,P0=5,kalman滤波程序在matlab中进行,得到Kalman滤波器输出最优化结果(图4实线)。
从图4的仿真图像可以看到,视觉引导下的研抛作用力距理想作用力的变化幅值较小,作用力比较稳定,对提高机器人的研抛精度有很大的帮助。
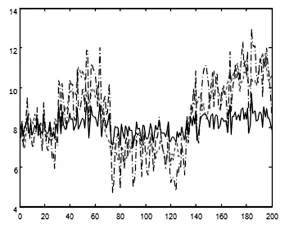
图4 在视觉引导下研抛力的变化
4 结语
本文主要对在机器人研抛控制研究中双目视觉(双目摄像机)和力传感器的工作过程进行了简单的分析。实验中,双目视觉伺服和力反馈联合控制能够精确地控制研抛工具和工件研抛点接触时的作用力,避免碰撞发生,可利用双目视觉对机械手的运动轨迹进行引导,通过力传感器来控制研抛过程中的作用力,提高了研抛效率和精度。对机器人智能化研抛加工方面具有一定的借鉴意义。
[1] 陈伟旺.基于视觉和力传感器融合的机器人反馈控制[D].郑州:华北水利水电大学,2014.
[2] Hosoda K,Igarashi K,Asada M.A daptive hybrid control for visualand force servoing in an unknown environment[J].Robotics&Automation Magazine,1998,5(4):39~43
[3] 刘东升.基于双目视觉的机器人在线检测技术的研究[D].青岛:青岛科技大学,2013.
[4] 熊有伦,丁汉,刘恩沧.机器人学[M].北京:机械工业出版社,1993.
[5] 宋伟刚.机器人学:运动学、动力学与控制[M].北京:科学出版社,2007.
[6] 秦永元,张洪钺,汪叔华.Kalman滤波与组合导航原理[M].西安:西北工业大学出版社,2004.
[7] 李鹏.卡尔曼滤波在信息融合理论中的应用[D].西安:西安电子科技大学,2008.
责任编辑:程艳艳
Analysis on Lapping and Polishing Joint Control of Robot Based on Vision and Force Feedback
YU Miao,FANG Shumin
(College of Machinery and Vehicle Engineering,Changchun University,Changchun 130022,China)
This paper,with the fusion technology of vision sensor and force sensor,makes a joint control analysis on manipulator lapping and polishing,which determines themanufacturing pointandmachining path by the visual sen-sor guidance,and then achieves the processing purpose by combiningwith force control,that is,amixed control of visual servo with force.In the hybrid controlmodel,the control algorithm based on vision servo and force feedback is applied to solve the problem of the coordination between vision and force.
joint control;visual servo;force feedback;mixed control of visual servo with force
TP242Ʊ2
A
1009-3907(2017)06-0004-04
2017-04-20
吉林省教育厅资助项目(2015第320号)
于淼(1972-),女,吉林长春人,教授,博士,主要从事多机器人协调加工方面研究。
猜你喜欢
电子制作(2019年20期)2019-12-04
重型机械(2019年3期)2019-08-27
测控技术(2018年5期)2018-12-09
测控技术(2018年4期)2018-11-25
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年9期)2018-08-04
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
浙江大学学报(工学版)(2016年9期)2016-06-05
通信电源技术(2016年1期)2016-04-16
