基于极限学习机的入土切割过程数据驱动模型研究
2017-07-31 20:40:35申科任晓智王旭艳麻芳兰
装备制造技术 2017年6期
申科,任晓智,王旭艳,麻芳兰
(广西大学机械学院,广西南宁530004)
ΣΣΣ
基于极限学习机的入土切割过程数据驱动模型研究
申科,任晓智,王旭艳,麻芳兰
(广西大学机械学院,广西南宁530004)
在甘蔗收割机切割过程中,入土切割能有效提高甘蔗切割质量,但入土切割深度过大极易造成推土现象,不利于控制刀盘升降。为了能够对刀盘入土切割深度进行有效控制,采用基于极限学习机的神经网络模型对影响刀盘负载压力的主要参数与刀盘入土深度之间的非线性关系进行拟合预测,并利用粒子群优化算法(PSO)对模型参数进行优化以提高极限学习机的泛化能力。通过仿真分析并与传统BP神经网络进行比较分析。由分析结果可知基于极限学习机的数据模型优于基于BP神经网络的数据模型,有良好的泛化能力,从而为对入土切割刀盘自动控制系统的研发提供了依据。关键词:极限学习机;粒子群优化;入土切割;甘蔗收割机
广西是我国最主要的甘蔗原材料基地,甘蔗糖的总产量能占到全国糖总产量的60%以上[1,2]。但是由于甘蔗收割过程机械化程度不高,严重制约了广西甘蔗产业的发展。广西的甘蔗种植规模小且分散;种植地形复杂,多以丘陵为主[3],国外大型切断式甘蔗收割机不适用于我国地形。而我国自主研发的甘蔗收割机由于普遍存在破头率较高的问题[4]而无法应用于实际。国内外学者对降低破头率做了大量的分析和试验研究。文献[5]中通过反求法建立甘蔗-土壤模型后通过仿真得到了入土切割可以有效降低破头率的结论。文献[6]中通过实地试验同样得到了入土切割能有效降低破头率的结论。虽然对入土切割研究较多,但是针对入土切割刀盘深度自动控制方面,却鲜有报道。而甘蔗收割机入土切割过深或过浅都会影响甘蔗收割质量,尤其是入土切割过深时会出现推土现象,从而引起刀盘负载压力过大。
为了解决入土切割时刀盘入土深度无法直接测量或者检测的问题,本文采用基于极限学习机的神经网络模型对影响刀盘负载压力的主要参数与刀盘入土深度之间的非线性关系进行拟合预测,并利用粒子群算法对模型参数进行优化从而提高模型的预测精度,通过构建入土深度预测模型达到对刀盘升降自动控制的目的。
1 极限学习机理论
极限学习机是由黄广斌[7]教授提出的一种新型的单隐含层神经网络。极限学习机与传统的单隐藏层反馈神经网络相比,能大幅提高学习速度、有较好的泛化能力并且能避免过拟合等问题[8,9]。由于该模型不需调整输入层与隐含层之间的权值以及隐含层的阈值而对其权值以及阈值进行随机取值,只需设置隐含层节点数,将最终问题化归为最小范数的最小二乘问题,从而得到最优解。假设有N组数据将其作为训练样本数据,其中输入输出数据样本分别表示为xi=!xi1,xi2,…xin"T∈Rn,t=!ti1,ti2,…tin"T∈Rm,i =1,2,…,N.隐藏层节点数为L.则标准单隐含层神经网络可表示为:

由上可知由于缺少输出层阈值,则输入权重以及隐藏层偏置不需调整,因此确定输出层权值即可得到数据驱动模型。所以公式(1)可表示为:

公式(2)中H表示为隐藏层输出矩阵,β表示为输出权值矩阵,T表示为输出矩阵。当ω和b固定时,隐藏层的输出矩阵也为固定矩阵。经过激活函数将H在高维呈现线性关系,利用最小二乘法可得:

其中,(H+)T表示的是样本输入层经过隐藏层后的输出矩阵的Moore-Penrose广义逆矩阵。
2 粒子群优化算法
粒子群优化算法是一种由Kennedy与Eberhart两位学者从鸟类觅食中受到启发在1995年提出的优化算法。每个粒子具有一定的飞行距离和飞行速度,通过改变自身粒子的位置和速度来不断调整粒子的适应度值,从而获取当前空间最优的粒子。各粒子通过不断迭代使得位置以及速度进行更新从而获取最优解。更新公式表示为:

其中,c1和c2为加速系数或认知系数,分别表示粒子对整体以及个体的认知程度;rand()为在[0,1]中均匀分布的随机值;Pid表示粒子i的个体最优位置;Pgd表示为全体最优位置。为防止粒子在飞行过程中飞出求解空间,分别将粒子速度和粒子位置限制在一定范围内中,避免盲目搜索的同时提高搜索能力。
3 基于粒子群的极限学习机数据驱动模型
由于极限学习机在对输入连接权值以及隐藏层阈值的取值是随机,所以可能含有无效点,导致输出权值矩阵有所偏差。为了避免无效点的存在,提高模型的泛化能力。本文提出了一种基于粒子群优化的极限学习机算法(PSOELM),优化输入连接权值和隐藏层阈值,消除无效点。利用粒子群对输入连接权值以及隐藏层阈值进行优化。其粒子群优化模型参数的具体步骤如下:
步骤一:历史数据随机分成训练样本和检测样本并归一化处理;
步骤二:确定粒子群中各项参数,如种群大小和最大迭代次数等;
步骤三:初始化种群,随机产生粒子初始化的位置和速度;
步骤四:将初始值带入适应度函数,得到初始适应度,并选取最优群体最优适应值;
步骤五:以其当前最优个体作为下一种群的初始值,并通过速度以及位置迭代公式进行迭代;
步骤六:迭代过程中,若新的个体适应度值比原来的适应度值小,保留新的个体适应度,否则保留原来的个体适应度以及全局适应度;
步骤七:若满足迭代结束条件,则输出全局适应度以及对应的适应度值,否则转向步骤三;
步骤八:获取最优输入连接权值以及隐藏层阈值。
优化算法为粒子群算法,激活函数为sig函数,构建极限学习机模型的具体步骤如下:
步骤一:对历史数据进行划分随机得到训练样本以及测试样本,同时对所有数据进行归一化处理;
步骤二:利用粒子群优化算法对极限学习机中的输入连接权值矩阵以及隐藏层阈值矩阵进行优化,求出最优矩阵参数;
步骤三:通过式(3)求解出最优输出连接权值;
步骤四:将最优输出连接权值、输入连接权值以及隐藏层阈值带入式(1)中得到甘蔗收割机入土切割过程数据预测模型。
4 仿真结果与分析
甘蔗收割机入土切割过程是一个较为复杂的非线性过程,无法通过常规方法对入土深度进行检测。本文通过引入基于粒子群优化的极限学习机算法建立入土切割过程数据驱动模型,对入土切割过程中切割器入土深度进行预测,从而达到控制刀盘的目的。
由课题组前期试验研究[10]可知入土切割时,土壤含水率、土壤密度、行进速度以及负载压力对刀盘入土深度的影响尤为显著。所以将其作为模型输入变量,将切割器入土深度作为输出变量。以前期所获取的27组正交试验数据[10]作为历史数据对模型进行仿真分析。为比较模型的优越性,本文选取基于BP神经网络预测模型进行对比。BP神经网络的迭代次数为200,学习率为0.1,目标精度为0.001,并采用4*6*1的网络结构。为保证数据模型的鲁棒性和泛化能力,通过均方根(RMSE)、均方(MSE)、平均绝对误差(MAE)以及决定系数(R2)等多个评价指标对测试样本进行比较,表1表示为基于BP神经网络、传统极限学习机以及基于粒子群优化的极限学习机数据预测模型的性能对比结果。以入土深度为输出,图1A、B分别表示基于粒子群优化的极限学习机与基于BP神经网络预测模型对测试样本的预测结果对比图以及绝对误差对比图。
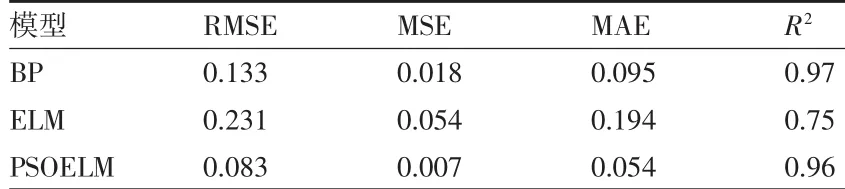
表1 基于不同方法构建数据驱动模型性能对比
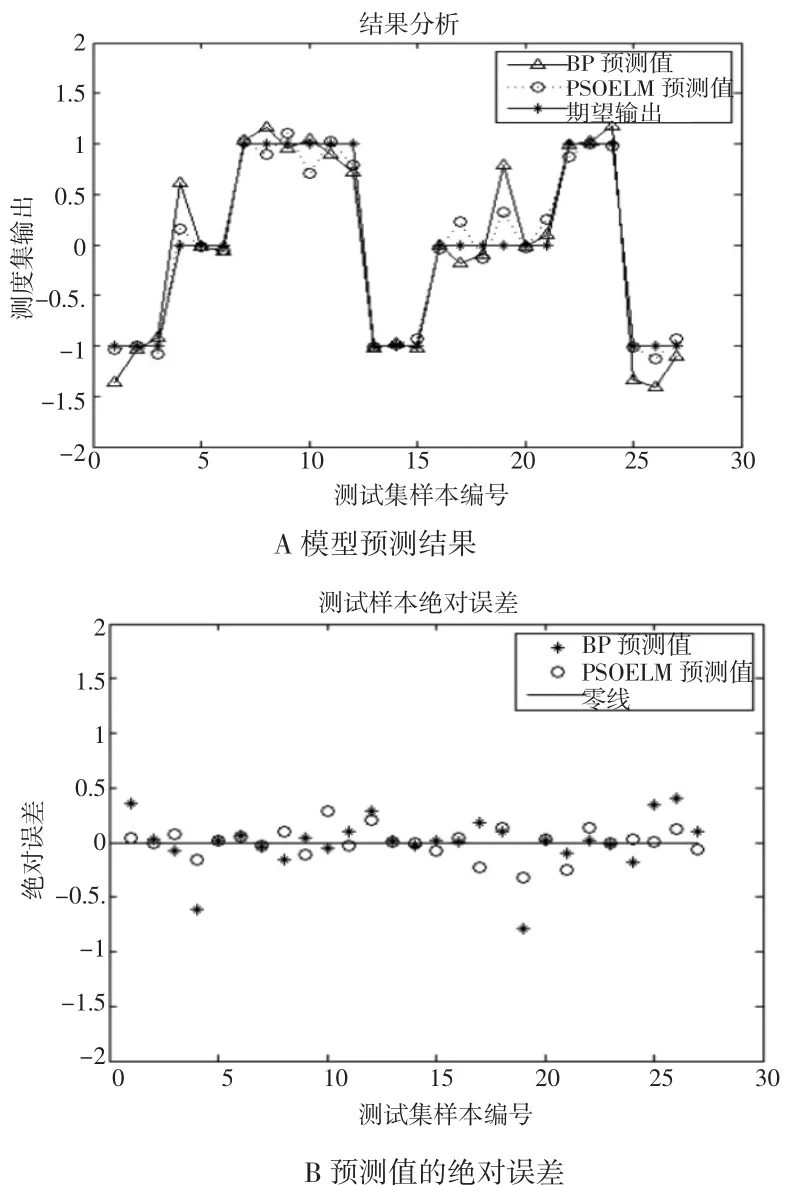
图1 基于PSOELM与BP神经网络模型性能
对模型进行评价时决定系数约接近1时说明数据驱动模型的预测性能和拟合效果越好,而RMSE、MSE以及MAE等指标越小表明模型精度越高。由表1可知本文提出的基于PSOELM以及BP神经网络的决定系数相对ELM均较高,而BP神经网络略高于PSOELM,但是相差不大。但PSOELM模型预测的均方根比BP神经网络减小37.13%,平均绝对误差减小了43.29%.通过绝对误差值以及精度评价指标的比较可知,基于粒子群优化的极限学习机入土切割过程数据驱动模型较BP神经网络模型能更好的反映期望输出,具有较好的鲁棒性以及泛化能力。
由图1可知,当绝对误差越接近零线时,说明数据误差波动越小,数据驱动模型拟合度程度越高。由图1B可知,基于PSOELM的绝对误差分布点较均匀的分别在零线上下且数值较小,而BP神经网络的绝对误差拟合程度相对较差,基于PSOELM的预测结果能够更为有效的反应期望输出,所以基于PSOELM数据模型的预测输出更能准确现体实值,具有更好的拟合能力。
5 结束语
由于入土切割时无法直接对切割器入土深度进行测量,本文采用极限学习机神经构建了反映入土切割过程中入土深度与主要参数之间的非线性预测模型。同时为提高驱动模型精度,利用粒子群优化算法对输入连接权值以及隐藏层阈值进行优化,得到了基于PSOELM数据驱动模型,利用历史数据样本对切割器入土深度进行预测。同时通过与BP神经网络进行对比验证了本文所构建的数据模型具有较好的泛化能力。
[1]王晓鸣,莫建霖.甘蔗生产机械化现状及相关问题思考[J].农机化研究,2012(10):6-11.
[2]侯佳.广西蔗糖产业发展现状与分析[J].新经济,2014(ZI):18-20.
[3]闫晓明.广西甘蔗生产机械化:困境与出路[J].农业部管理干部学院学报,2013(4):32-36.
[4]曾志强,区颖刚,解福祥,等.切断式甘蔗联合收获机的试验与分析[J].农机化研究,2012(09):164-166.
[5]陈永继,杨坚,黄丽丽,等.甘蔗—土壤系统仿真模型的研究[J].农机化研究,2009(3):134-136.
[6]王增.甘蔗收获机切割器液压系统压力影响因素的试验研究[J].中国农机化学报,2015(1):37-40.
[7]Huang GB,Zhou HM.Extreme learning machine for regression and multiclass classification[J].IEEE Transactions of Systems,2012,42:513-529.
[8]Song Y,Zhang J.Automatic recognition of epileptic EEG patterns via Extreme Learning Machine and multiresolution feature extraction[J].Expert Systems with Applications,2013,40
(14):5477-5489.
[9]Olatunji S O,Selamat A,Abdulraheem A.A hybrid model through the fusion of type-2 fuzzy logic systems and extreme learning machines for modelling permeability prediction[J]. Information Fusion,2014,16:29-45.
[10]赵静.甘蔗收获机切割系统负载压力影响因素的研究[D].南宁:广西大学,2015.
The Buried Cutting Process Data-Driven Model Based on Extreme Learning Machine
SHEN Ke,REN Xiao-zhi,WANG Xu-yan,MA Fang-lan
(College of Engineering,Guangxi University,Nanning Guangxi 530004,China)
In the process of sugarcane harvester cutting,the buried cutting process which can effectively improve the quality of the sugarcane cutting,which also can easily cause bulldozing phenomenon when it cuts too deep.In order to be able to effectively control capacity of cutter cutting depth,the neural network model based on extreme learning machine main parameters affecting the load pressure capacity and the cutter‘s depth the nonlinear relationship between forecast,and by using particle swarm optimization algorithm for model parameter optimization,which can improve the generalization ability.It will compare with the traditional BP neural network by the simulation analysis.the data model based on extreme learning machine is better than on BP neural network according to the analysis results,which has good generalization ability,which provides the basis for the research and development of the automatic control system.
extreme learning machine;particle swarm optimization;cutting blow soil;sugarcane harvester
S225.5
A
1672-545X(2017)06-0001-03
2017-03-21
国家自然科学基金资助项目(51465004);广西自然科学基金资助项目(2014GXNSFAA118381);广西制造系统与先进制造技术重点实验室项目(13-051-09S02)
申科(1989-),男,广西桂林人,本科,研究方向:先进制造以及自动化;任晓智(1973-),女,山东莱州人,硕士,讲师,研究方向:虚拟仿真以优化设计。
猜你喜欢
科技与创新(2017年3期)2017-03-17 15:03:55
软件导刊(2017年1期)2017-03-06 00:41:18
现代电子技术(2017年3期)2017-03-04 21:19:14
计算机应用(2016年12期)2017-01-13 20:14:42
计算技术与自动化(2016年4期)2017-01-11 14:19:49
科技视界(2016年20期)2016-09-29 11:58:53
电脑知识与技术(2016年3期)2016-04-07 16:12:55
软件导刊(2015年12期)2016-01-05 06:30:06
现代电子技术(2015年16期)2015-11-17 21:14:12
现代电子技术(2015年21期)2015-11-09 21:42:01