
基于模板匹配的交通灯跟踪算法
2017-07-27 21:42陈红妃朱敏娟罗晓镁
电脑知识与技术 2017年11期
关键词:实时性
陈红妃+朱敏娟+罗晓镁


摘要:模板匹配算法是跟踪算法中的主要处理方法。由于道路交通灯的跟踪是一个实时的过程,需要在尽可能短的时间内跟踪到图像中交通灯的具体位置。普通模板匹配是对于整张图片的检测与匹配,计算量很大,在短时间内无法得到结果,该文在对交通灯追踪定位时依据时空相关性的思想,在邻域内查找追踪,减少计算量以达到实时的效果,基于该算法,实现道路交通灯的实时跟踪。
关键词:模板匹配;时空相关性;交通灯跟踪;实时性;领域查找
随着智能交通的发展,道路交通安全问题日益严峻,越来越多的目标检测与识别技术被应用于这个领域中。交通灯检测是智能交通系统研究的一个重要方向,一方面可以有效地辅助驾驶员驾驶,提供驾驶员安全信息,降低疲劳驾驶带来的危害;另一方面促进无人驾驶系统的发展,对于无人驾驶的车辆,交通灯检测是一项确保安全的关键技术。因此,对交通灯的检测跟踪显得尤为重要。
现有较为常用的目标检测算法是模板匹配算法,它根据一幅已知的“模板”在大图像中寻找并定位目标。本文介绍了基于模板匹配的交通灯跟踪算法,并结合时空相关性加以改进,较之传统的模板匹配算法,提高了计算效率,达到实时性的要求。
2方法
常用的视频目标跟踪算法主要有,基于对比度分析的目标跟踪、基于匹配的目标跟踪、基于运动检测的目标跟踪,本文采用的是基于匹配的目标跟踪。本文采用的基于匹配的目标跟踪算法,主要通过前后帧之间的模板匹配实现目标的定位。
1)模板匹配算法
模板匹配算法就是依据已知模式在一幅较大图像(搜索图)中搜索相应模式的处理方法。已知模式即模板图,是一幅已知的图像,也就是所要搜寻的目标。设搜索图R大小为MxN,模板T大小为mxn,将模板叠放在搜索图像上平移,模板覆盖搜索图的区域为子图s,其中x,y是s左上角在搜索图的位置。
由模板匹配的概念可知,我们需要沿着搜索图像中的所有点移动模板,并且按(1)式计算每个位置模板与子图的相似值D。
2)本文的模板匹配算法
本文依据时空相关性对传统的模板匹配算法进行改进。由于在交通灯跟踪过程中,交通灯的位置及形状保持不变,车辆基本以恒定速度运行,可以将这个过程看成一个连续变化的过程,所以在很短的时间内,相邻的两帧中交通灯的形状基本没有变化。因此,本文依据这一特性,选择在上一帧中目标的邻域范围内进行模板匹配。从而减少计算量,提高计算效率。
3设计
3.1临近帧跟踪
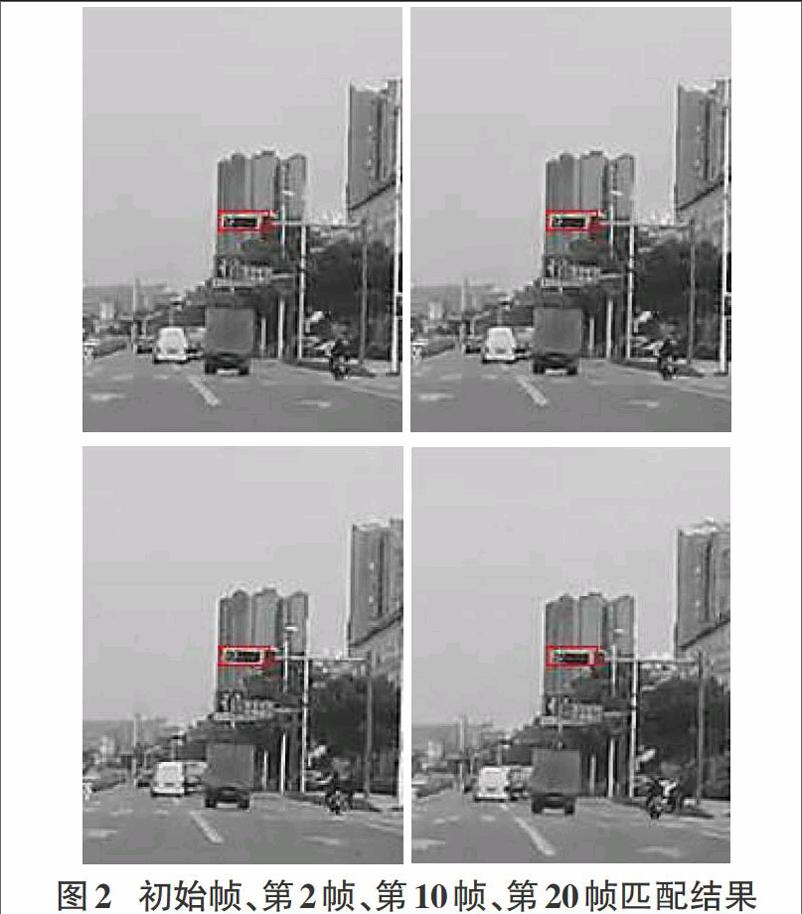
在交通灯跟踪的初始阶段,首先依据模板,对跟踪交通灯的起始帧,进行全局范围的模板匹配,获得交通灯在起始帧中的位置。由于起始的模板提取自起始帧的图像中,所以在使用传统的模板匹配算法对目标进行全局的匹配时,会得到很高的相似度,也就是模板与起始帧图像中的目标匹配差值(欧氏距离)很小。
得到起始帧中交通灯的位置后,将在起始帧中匹配得到的目标保存为新的模板,并记录目标在起始帧中的位置信息。
在第二帧的目标匹配中,依据时空相关性,只在其邻域范围进行模板匹配计算。在交通灯的跟踪过程中,整个跟踪过程所得到的图像,可以看成是一个连续的过程,所以在整个跟踪过程中,每一帧中交通灯的位置及形状变化相差不大,也就是具有“时空相关性”。因此,在对图像中的交通灯定位时,不需要在整幅图像中对模板进行匹配,只需要在一定区域内匹配。依据时空相关性,由于目标交通灯与上一帧中的位置变化不大,所以只需要在上一帧所得到的交通灯位置的邻域范围内进行匹配即可。
基于时空相关性改进的模板匹配算法,一方面只需要在模板邻域范围内进行匹配计算,很大程度上缩减了匹配计算的范围,提高了整个跟踪过程中目标搜索的效率;另一方面,只在邻域范围内,也就删减了整个图像中其他范围内的信息,降低了周围环境信息对交通灯跟踪的影响,在一定程度上提高了交通灯跟踪定位的准确率。
3.2长距离跟踪
在短距离内对交通灯跟踪定位,交通灯的大小不会发生较大的改变,但在长距离范围时,交通灯的大小会随着距离的缩减而变大,因此在整个交通灯的跟踪过程中,还需要对交通灯大小的变化进行考虑。本文采用的方法是:在一定帧间隔(也就是时间间隔)T内,对模板扩大P个像素点。
通常对速度以及视频图像中帧速率的描述都是以s为标准,在本文中将时间间隔设置为1s,本文算法使用帧数代替时间,T=29帧,相当于1s。
3.3交通灯跟踪中停车状态判断
在正常速度行驶时,在时间T内对模板扩大P个像素点。当停车时,应当停止对模板的扩大。如何判断是否处于停车状态呢?本文采用的方法是:在时间间隔T的起始,记录目标的位置T1,在时间间隔T的末尾,此时的目标位置记作T2,计算T1与T2的差值,如果T1与T2的差值为0,则表明在这一时间间隔内,目标的位置几乎没有变化,也就表明这一时间间隔内,行车距离很短或者处于停车状态。那么在這一时间间隔内,将不对目标模板进行放大处理。
4结论
本文依据时空相关性,对传统模板匹配算法进行改进,提出了一种快速的基于模板匹配的交通灯跟踪算法。相较于传统的模板匹配算法,本文算法对其进行优化,依据时空相关性在原位置邻域范围内进行匹配,提高了目标定位的准确度,减少了环境对跟踪目标的影响,并且很大程度上提高了计算速度,效率高,能满足实时性的需求。
猜你喜欢
高技术通讯(2021年3期)2021-06-09
电测与仪表(2017年24期)2017-12-19
北京航空航天大学学报(2017年12期)2017-04-23
科技资讯(2016年28期)2017-02-28
航天控制(2016年6期)2016-07-20
铁路通信信号工程技术(2014年5期)2014-02-28
