
无人机低空遥感技术在水文应急演练中的应用
2017-07-24 17:40孙振勇王世平彭万兵
水利水电快报 2017年6期
孙振勇 王世平 彭万兵
(长江水利委员会水文局长江上游水文水资源勘测局,重庆 400020)
无人机低空遥感技术在水文应急演练中的应用
孙振勇 王世平 彭万兵
(长江水利委员会水文局长江上游水文水资源勘测局,重庆 400020)
在高危复杂环境下,快速有效获取水文信息是当前水文应急监测能力提升的关键。水文部门必须运用先进的仪器设备与技术措施,对水文信息进行快速高效的采集、传输和处理,为抢险排险提供准确、可靠的实时数据。无人机系统低空遥感技术以其机动灵活、影像分辨率高、成果丰富多样、成本低廉等特点,在应急监测中发挥着越来越重要的作用。介绍了无人机航摄遥感系统的基本构成和作业方法,结合2015年全国水文应急演练,对模拟灾区进行了应急监测及数据处理。结果表明,基于无人机低空遥感技术进行应急监测,可大幅提高水文监测精度和抢险救灾处置效率。
水文应急监测;无人机; 遥控技术;低空遥感
1 研究背景
自然灾害或突发事件, 大多具有发生的突然性、 形式的多样性、 结果的危害性、 处理处置的艰巨性和危害的持续性等特征[1], 这就要求通过现场应急监测来快速收集翔实的数据信息, 从而为灾害、 次生灾害的调查及应急指挥决策等提供有效技术支撑。 与常规水文测验和水文监测相比, 应急监测具有不同的要求和特点。 本文分析了当前水文应急监测技术的基本特点, 阐述了无人机系统的组成及低空遥感技术的作业方法, 结合2015年全国水文应急演练, 对基于无人机低空遥感技术的应急监测技术、 监测精度和抢险救灾处置效率进行分析和评价。
2 当前水文应急监测技术的特点
灾害应急救援提高效率的关键因素是及时获取灾害区域的灾情信息。如何快速、准确地获取相关数据已经成为应急抢险的难题和研究热点。应急水文监测受特殊灾害环境下各种不利因素的制约,对仪器设备的要求更高。经过调研和大量的仪器设备技术指标分析,在唐家山堰塞湖、舟曲泥石流等突发灾害处置中的运用实践表明,当前应急水文监测主要使用免棱镜全站仪、高精度GPS、电波流速仪、卫星遥感监测等关键技术装备[2]。当前水文应急监测技术管理体系日趋完善,仪器设备先进成熟,具备了以下特点: ①围绕水文应急预案、水文应急管理体制、机制和法制建设, 水文应急管理体系成熟完善[3]; ②监测技术智能一体,数据获取实现了多元性、综合性、大面积的同步观测;③ 效率和精度高,经济效益扩大;④大量采用非触源式作业模式,逐渐摆脱环境制约影响,大大提高了安全性能[4]。
无人机作业方式主要为800 m以下的低空飞行,与传统航空摄影测量和卫星光学遥感相比,可以不受云层遮挡,是有效的弥补手段[5]。无人机低空遥感系统具有快速机动、影像分辨率高、实时性强、成本低廉的特点,且属于非触源式作业方式,能胜任各类高危区域作业,适用于各种灾害的应急救援[6]。
3 无人机低空遥感技术
3.1 无人机系统组成
无人机系统航摄遥感平台可分为飞行器系统、通讯链路和地面控制站三大部分,详见图1。飞行器系统的主要功能是接收航线规划并实施飞行计划。地面控制站主要功能包括任务规划、飞行实时控制、姿态数据的实时接收和指挥调度。飞行器系统通过通讯链路与地面控制站进行飞行数据传递,以便工作人员实时监测飞行器的飞行状态[7]。
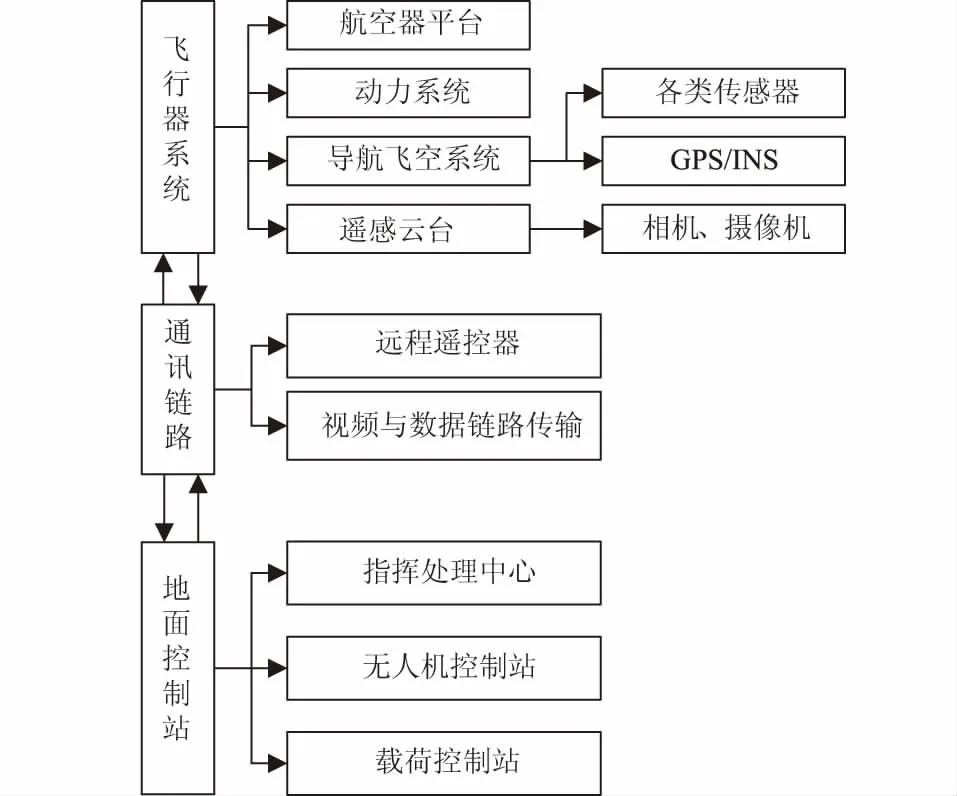
图1 无人机系统航摄遥感平台构架
3.2 影像数据获取
无人机低空航摄需要经过航线设计、航线飞行、质量检查和像控测量等步骤[8],影像获取的关键是任务规划,包括航迹规划、任务分配规划与系统保障和应急预案规划等,其中,航迹规划是任务规划的主体和核心。影像数据获取流程如图2所示。
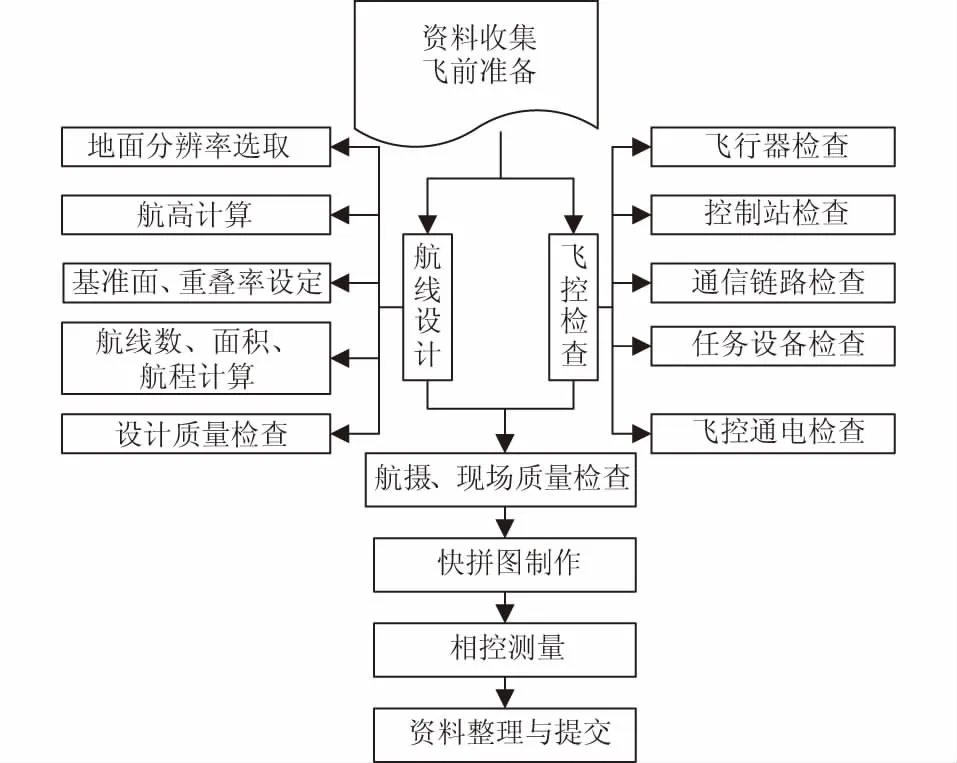
图2 无人机系统影像数据获取流程[9]
4 影像处理
鉴于灾害的突发性以及灾后环境的复杂性,通常不可能按常规的航空摄影进行设计和飞行航摄。姿态的杂乱以及飞行航线的不规则造成了成像影像像对的旋角、倾角过大,从而加大了影像匹配难度,严重影响了影像的重叠度。应急监测核心技术问题就在于航摄数据的快速处理,包括少地面控制甚至无地面控制的影像纠正,航摄影像图的快速拼接和纠正、影像匀光等。
4.1 畸变差改正
数码相机由于镜头的光学设计原因未进行严格的校正,也没有进行内方位元素准确测定,故拍摄得到的普通影像存在非线性光学畸变误差。在焦距不变的前提下,镜头畸变属于系统误差。因此,在处理普通数码相机影像时,需要在进行空中三角测量前先进行畸变差改正。
畸变差改正通常有两种方法:①直接改正法,即通过直接计算畸变图像上每个像素的改正坐标,实现图像改正;②间接改正法则是通过计算每个改正像素在畸变图像上的坐标,实现图像的改正[10]。此次应急监测采用的是直接改正法。
4.2 空中三角测量
空中三角测量时,为了获取像片上的像点坐标,求解影像的定向元素和测图所需的控制点坐标数据。常用的方法主要有为航带法区域网空三测量、独立模型法区域网空三测量和光速法区域网空三测量[11]。
光束法区域网平差是以投影中心点、像点和相应的地面点三点共线为条件,以单张像片为解算单元,借助像片之间的公共点和野外控制点,把各张像片的光束连成一个区域进行整体平差,解算出加密点坐标。基本理论公式为中心投影的共线条件方程式:
(1)
式中:x,y为某像点的像空间坐标,f为摄影机主距;X,Y,Z为该像点对应的地面坐标;XS,YS,ZS为外方位线元素;a1,a2,a3,b1,b2,b3,c1,c2,c3为外方位角元素表示的方向余弦。由式(1)可知,区域网平差精度主要取决于像控点的外业采集精度。因此,布设像控点时应尽量均匀分布在整个航摄区域,且选择的地物点地形特征比较明显[12]。
4.3 快拼图生成
图像自动拼接技术是指通过先进的计算机图形和色彩学技术,将空间上存在一定重叠的两幅或者多幅图像进行配准,并融合成一幅完整全新的图像的技术[13]。鉴于应急监测数据实时性需要,可通过快速拼图软件对无人机低空航摄高分辨率影像进行镶嵌拼,快速得到灾区全影像图[14]。快拼图无需GPS信息和相机参数,可以自动识别相机焦距,能自动平差和粗差剔除,自动生成快拼图(DSM)和正射纠正。利用快拼软件制作,还可以实现DSM编辑和量测功能,从而可以从DSM上进行距离、面积、体积等量算。严格意义上看,快拼图精度上比数字正射影像图(DOM)要低的多,但是可在2 h左右获得灾区大致信息,在灾情分析、决策等方面具有一定的实用性。
5 水文应急演练应用
2015年在重庆举行的全国水文应急演练现场,模拟了重庆市长江支流木洞河流域内发生特大暴雨洪水,引起河岸坍塌并形成了堰塞湖情况。长江水利委员会水文局应急抢险总队上游支队紧急奔赴现场实施水文应急监测,收集灾区相关数据资料[15]。演练区域内左右岸人工堆砌了堰塞体坝,沿河两岸植被茂密,地形起伏较大,沿河岸高差至百米。该处交通不便,仅有一条县道通往该处,且公路距河边高差较大,仅有田间泥泞小路下至河边,仪器设备运送极为困难。演练区整体地势为河流由西向东地带低洼,河岸向南北陡增,最低海拔169 m,最高海拔495 m。
应急监测技术人员针对现场环境,启动应急预案,采用四旋翼无人机系统,搭载索尼A7r相机,相机镜头焦距为35 mm,预设飞行的相对航高为330 m,预设航向重叠度70%,旁向重叠度45%。对现场进行航线规划,检查无误后发送至飞行器系统中。飞行器系统启动后按照预设航线实施影像数据获取,并将拍摄的数据进行存储或通过地面微波站实施传输。全程中在地面控制站实时监控无人机的飞行。本次低空遥感航摄飞行,沿东西方向飞行了8条航线,共拍摄了200多张影像。另外搭载了高清数码摄像机实时获取并向后方指挥中心传输影像数据达3.54 G,所获取的无人机影像地面分辨率达到0.05 m级。图3为全国水文应急演练木洞河流域模拟灾害区无人机快拼DSM图(数字表面模型图)。
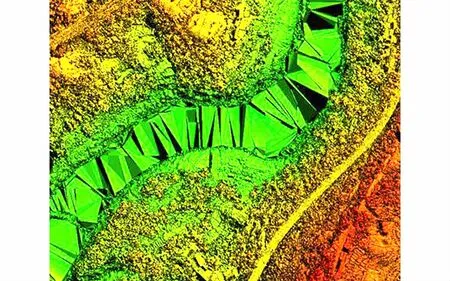
图3 全国水文应急演练木洞河流域模拟灾害区无人机快拼DSM示意
本次演练采用航天远景MapMatrix数字正射影像处理软件进行正射影像纠正与制作。在完成空中三角测量后,就可以进行正射影像生成、数字高程模型获取等。图4为无人机航拍制作的全国水文应急演练模拟灾害区高分辨率DOM图(数字正射影像图)。

图4 全国水文应急演练模拟灾害区高分辨率DOM示意
6 结 论
此次水文应急演练监测显示,无人机低空遥感技术能快速、有效地应对水文应急监测,起到有力的技术支撑作用,确保处置安全有效。无人机低空遥感影像技术主要表现出以下特点:
(1) 遥感平台丰富多样,成果多元化。无人机低空遥感技术搭载数码相机、摄像机、红外仪等多种遥感设备,可以同时获取测区的快拼图、数字正射影像图、数字高程模型等各类数据产品。还可获得测区的地质地貌、地形植被、水文土壤等各类综合信息。
(2) 机动灵活,降低了作业强度,提高了安全性能。无人机低空航摄航拍,不受高层云雾天气影响,且无人机本身结构简便,易搬运和安装。地面站人员通过通讯链路控制飞行器遥感航拍采集数据,无需人员直接到达危险困难区域作业,保障了作业安全。同时依靠人机交互的计算机处理技术,大大减轻了工作强度。
(3) 精度高、效率快。无人机低空遥感技术在灾害发生后,可第一时间利用快拼软件获取灾后全貌图像,宏观快速地获取灾情信息,也可进行空三解析获取高精度高分辨率DOM、DEM等数据产品,实时分析灾情。
通过在水文应急演练中成功运用表明,无人机低空遥感技术可在水文应急监测中将发挥较强的优势,不仅可用于灾害区域整体评估、堰塞体几何特征估算、堰塞湖体面积量算和回水位置确定等领域,还能够在有效规避人员安全隐患条件下,收集到宝贵的灾区水文资料,为抢险救援提供及时的灾情数据信息。
[1] 史绵红,余晶京,刘静思,等.我国突发环境事件现场应急监测仪器技术现状及展望[J].化学通报,2015,78(5):414-420.
[2] 陈松生,林伟.唐家山堰塞湖水文应急监测[J].人民长江,2008,39(22):32-35.
[3] 王俊.水文应急管理体系建设[J].人民长江,2011,42(增):1-6.
[4] 孙振勇,马耀昌,任勇,等.多源空间信息技术在全国水文应急演练中的应用[J].城市勘测,2011(4):87-90.
[5] 周洁萍,龚建华,王涛,等.汶川地震灾区无人机遥感影像获取与可视化管理系统研究[J].遥感学报,2008,12(6):877-884.
[6] 雷添杰,李长春,何孝莹.无人机航空遥感系统在灾害应急救援中的应用[J].自然灾害学报,2011,20(1):178-183.
[7] 孙毅.无人机驾驶员航空知识手册[M].北京:中国民航出版社,2014 .
[8] 张潘,余代俊,索朗江村,等.无人机遥感系统在应急保障中的应用[J].地理空间信息,2016,14(11):27-29.
[9] 孙振勇,马耀昌.无人机系统KC1600航飞测试报告[R].武汉:长江水利委员会,2015.
[10]国家测绘局人事司.航空摄影测量[M].哈尔滨:哈尔滨地图出版社,2007.
[11]鲁恒,李永树,李何超,等.无人机影像数字处理及在地震灾区重建中的应用[J]. 西南交通大学学报,2010,45(4):533-538.
[12]张祖勋, 张剑清. 数字摄影测量学[M] .武汉: 武汉测绘科技大学出版社, 1997:99-122.
[13]王子维. 无人机遥感图像的拼接技术研究[D] .大庆:东北石油大学, 2015.
[14]曾涛,杨武年,简季.无人机低空遥感影像处理在汶川地震地质灾害信息快速勘测中的应用[J].2009,测绘科学,34(增):64-65.
[15]包波.2015年全国应急水文测报演练技术总结[R].武汉:长江水利委员会,2015.
(编辑:李 慧)
2017-03-31
孙振勇,男,长江水利委员会水文局长江上游水文水资源勘测局,工程师.
1006-0081(2017)06-0032-04
TP79
A
猜你喜欢
河北地质(2021年3期)2021-11-05
河南水利年鉴(2020年0期)2020-06-09
河南水利年鉴(2020年0期)2020-06-09
北京航空航天大学学报(2017年9期)2017-12-18
水利规划与设计(2017年6期)2017-07-18
河南水利年鉴(2017年0期)2017-05-19
河北林业科技(2016年5期)2016-11-08
南方文学(2016年3期)2016-06-12
中国房地产业(2016年8期)2016-03-01
兵器知识(2016年2期)2016-01-29
