
基于SolidWorks的液压凿岩台车伸缩臂有限元分析∗
2017-07-24 14:05:26成学东
采矿技术 2017年4期
成学东
(五矿矿业(安徽)开发有限公司, 安徽六安市 237474)
基于SolidWorks的液压凿岩台车伸缩臂有限元分析∗
成学东
(五矿矿业(安徽)开发有限公司, 安徽六安市 237474)
对液压凿岩台车关键变位机构伸缩臂的极限位置进行静力分析,基于Solid-Works平台对液压凿岩台车伸缩臂进行了三维重构,并采用有限元分析理论对伸缩臂结构进行了应力、变形分析。以此为指导设计制造了液压凿岩台车伸缩臂,应用结果表明,该伸缩臂符合实际工况需求,可靠性强,安全度高,可为同类结构的设计提供参考。
液压凿岩台车;伸缩臂;SolidWorks;有限元分析
0 引 言
液压凿岩台车是机电液一体化的大型凿岩设备,广泛应用于采矿、水电、道路、桥梁建设等工程。相较于同级气动凿岩钻机,液压凿岩台车具有明显优势,其效率提升显著,钻孔速度更快,同时对工作环境较为友好,随着社会经济快速发展,液压凿岩台车的种种优势使其在凿岩工程设备中占有一席之地。钻臂是液压凿岩台车的重要承载机构,凿岩设备、偏摆装置通过钻臂与液压凿岩台车机身连接,同时,钻臂也是液压凿岩台车的重要变位机构,通过钻臂的举升、偏摆以及伸缩进行变位[1-2]。
本文研究对象为某型单臂液压凿岩台车,其大臂与车体交接,悬臂端承载钻杆库、凿岩机、导轨、回转马达等附件,用于环形爆破面穿孔作业,其最大有效载荷为29784N,有效伸缩行程1200mm,缸径250mm,缸筒直径330mm。其主要载荷形式为径向与钻臂垂直。
钻臂作为承载液压凿岩台车工作机构的主要工作部件,其主要结构形式为伸缩油缸式,一端与机体铰接,一端承载钻杆库、回转机构和凿岩机等主要工作机构。同时根据液压凿岩台车工作形式,钻臂需要覆盖尽可能大的工作范围,因此悬臂式钻臂是液压凿岩台车结构系统中的关键部件。其结构稳定性和安全性尤其重要。所以需要对伸缩臂进行静力学分析,以确保其工作能力及可靠性符合设计要求。
对于此类悬臂大负载承载机构,业内普遍应用有限元分析法对其进行静力学分析。有限元分析法其突出特点是可以通过对连续体的离散化,将连续体离散成有限个单元,对有限个单元进行插值求解以解决各种实际问题[3]。在工程实际中,大多数问题无法得到解析,而有限元分析法得到的近似解计算精度较高,因此成为广泛应用的分析方法。
随着计算机技术的发展,涌现了一批可以进行有限元分析的工程软件,极大方便了工程人员进行建模分析。本文基于SolidWorks对液压凿岩台车关键机构伸缩臂进行三维建模,并利用simulation插件对其进行静力分析,确保其可靠性。
1 伸缩臂及套筒的三维重建
伸缩臂是液压凿岩台车的关键变位机构及承载机构,液压凿岩台车的连续性工作对其可靠性要求高。
液压凿岩台车工作过程中需要由大臂承载大部分工作载荷,承载时间长,载荷大。因此伸缩臂的结构稳定性和安全性对液压凿岩台车的性能影响重大。同时由于液压凿岩台车需要准确实现布孔定位工作,因此其工作过程中的结构位移变化也对液压凿岩台车工作稳定性与可靠性具有重要影响。
为满足液压凿岩台车实际工作需求,满足国内主流矿山采场需求,尽可能覆盖采场工作面,因此其行程根据设计需求应达到1200mm。如图1所示,伸缩臂由伸缩臂主体,平键以及臂套构成,伸缩臂主体的左端连接工作机构,右端套入臂套中,通过臂套与钻臂大臂连接。

图1 伸缩臂装配体
在建立三维模型时,可对结构主体进行适当简化,在不影响结构型式与结构强度的前提下对明显不影响分析的特征进行简化,如倒角等,可大幅减小后续的网格化以及静力分析的运算量以及难度,同时确保不影响最终的分析结果。
进行静力学分析的目的是确保伸缩臂的可靠性,故选取合适位置是三维建模的基础。根据凿岩台车工作情况,当伸缩臂主体伸出至极限位置时,连接处受力最大、结构最危险,因此,以伸出极限位置进行建模,基于实际应用环境建立三维模型如图2所示[4-6]。
通过对液压凿岩台车伸缩臂进行三维重构,确定模型结构尺寸,对各结构件材料进行设定,方便后续进行有限元分析,依据工程经验和实际设计情况,设定伸缩臂主体材料为40Cr。该材料强度高,加工性能好,在工程应用领域使用广泛。
2 有限元分析
根据SolidWorkssimulation静态运算需要,对装配体零件材料属性进行设定,伸缩臂整体材料均为40Cr,其材料参数为:弹性模量E:2.10e+11 N/m2;切变模量G:8.08e+10N/m2;泊松比: 0.288;质量密度:7860kg/m3;屈服强度:10.5e+08 N/m2;许用应力:8.5e+08N/m2。
液压凿岩台车伸缩臂为悬臂式油缸结构,其载荷主要为悬臂前端回转机构、凿岩机、钻杆库、导轨等工作机构,根据等效载荷计算方法,其载荷为29784N。伸缩臂是钻臂的一部分,臂套起着约束作用,因此,在臂套面施加固定约束。
作用位置为伸缩臂法兰盘,通过螺栓连接,因此载荷的作用位置可定量设定为单一悬臂载荷,无交变载荷,其作用方向根据液压凿岩台车工作状态确定。当伸缩臂水平时,载荷沿竖直方向作用于法兰盘表面结构最危险。
伸缩臂约束为臂套固定约束,当油缸伸出至极限位置1200mm时,载荷施加位置为法兰盘与伸缩臂轴向垂直,载荷29784N。
为确保装配体在装配过程中不发生干涉,从而影响对模型的网格划分,因此需要在进行网格划分前对模型进行干涉检查。根据有限元理论,为提高分析精度,降低分析难度需要对液压凿岩台车伸缩臂三维模型进行网格控制,对臂套网格可粗糙化处理,伸缩臂需细化网格特性,以平衡细化网格和工作效率的关系,通过对伸缩臂三维模型的网格控制确保在保证结果准确的前提下提高设计效率。网格化后的模型如图3所示。
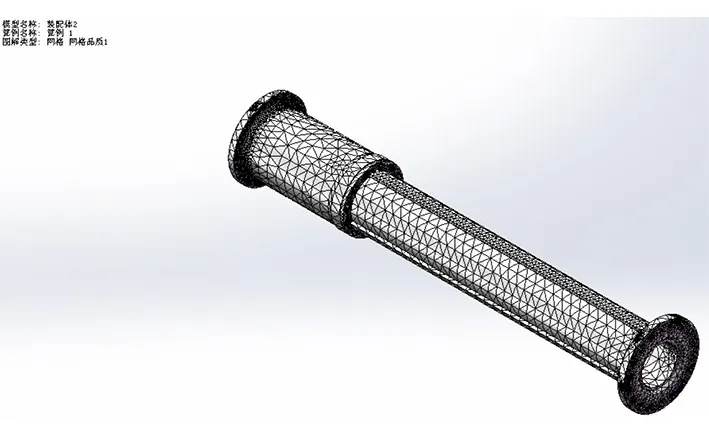
图3 网格化的模型
通过对伸缩臂三维模型网格化设置,自动生成网格节点总数为120970,网格单元控制为71703,最大网格单元大小为40.3522mm。网格化的各项参数符合对伸缩臂分析需求,实现了对伸缩臂模型的重点分析目标,网格化效率较高。
根据对液压凿岩台车伸缩臂实际应用情况分析,比对有限元分析环境设定,确定伸缩臂模型符合实际设计,约束、载荷、网格划分满足设计需要。基于此运行网格化的模型,生成伸缩臂模型的静力分析结果。图4为静态应力分析。
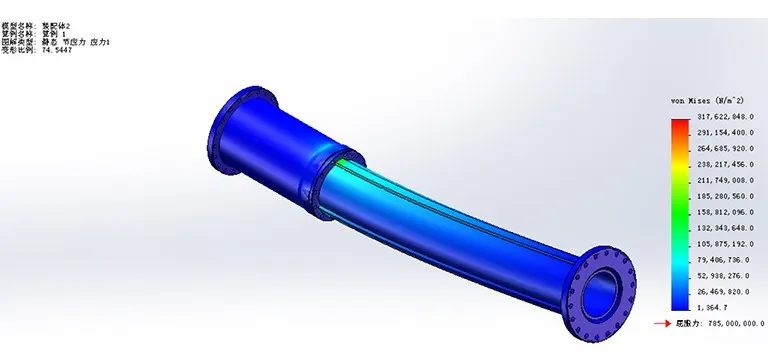
图4 静态应力分布
根据模拟结果可知,最大集中应力为3.17MPa,其位置为臂套与伸缩臂结合处。小于40Cr的屈服极限,故该结构设计安全可靠,满足设计要求[7-8]。
鉴于伸缩臂其结构变形会直接影响液压凿岩台车对凿岩孔位的定位精度,是定位误差的重要来源。因此需要对伸缩臂全载荷状态下最大位移进行计算。分析所得合位移分布如图5所示。
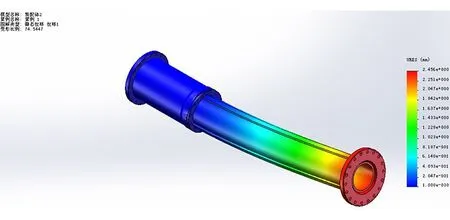
图5 合位移分布
根据图5可知,伸缩臂最大变形量为2.456 mm,处于悬臂末端,但是总体位移量较小,不足以对液压凿岩台车凿岩孔位定位误差小于200mm的精度要求造成太大影响,满足变位机构的精度需求。
3 应用验证
以本次分析结果为指导,对液压凿岩台车伸缩臂进行了优化设计,试制了液压凿岩台车伸缩臂,并进行了相应检测及凿岩试验。其实际应用情况见图6。

图6 液压凿岩台车钻臂现场应用
应用结果表明,伸缩臂安全可靠,满足液压凿岩台车对定位精度的要求,经过相关检验部门检测。定位精度为194mm,大臂伸缩行程1200mm,符合设计要求。样机在中金岭南凡口铅锌矿进行了连续作业测试,结构稳定性和可靠性得到了充分检验,应用效果良好。
4 结 论
本次研究基于SolidWorks平台对液压凿岩台车关键变位机构伸缩臂进行了三维重构,以有限元理论为依据,利用simulation插件对其进行了静力分析,得到了其极限位置的应力分布图和合位移分布图,并以此为指导设计制造了满足实际应用需求的液压凿岩台车伸缩臂。经过现场应用和相关部门检验,该伸缩臂满足设计需要,结构稳定可靠,可为同类结构的设计提供技术参考。
[1]许 可,李东明.智能中深孔全液压凿岩台车智能控制技术的探究[J].采矿技术,2015,15(3):72-73,78.
[2]席汝凯,李东明,张永玺,等.基于SolidWorks的大臂组合体有限元分析[J].矿业研究与开发,2016,36(8):78-80.
[3]赵经文,王宏钰.结构有限元分析[M].北京:科学出版社, 2001.
[4]吕红军.基于基于Solidworks有限元分析的卷料轴安全校核[J].机电信息,2016(21):174-175.
[5]赵 伟,殷国富,陈 航,等.基于SolidWorks和ANSYS的机器人手臂性能分析与优化[J].机器人技术,2009,36(12): 48-50.
[6]苗红涛.基于SolidWorks的中空塑料包装容器耐内压强度有限元分析[J].包装工程,2016(1):74-77.
[7]任亚洲,张 蕾.基于SolidWorkssimulation刮板输送机轨座结构优化及有限元分析[J].煤矿机械,2017(1):152-153.
[8]李立顺,李红勋,孟祥德.基于SolidWorkssimulation的有限元分析方法[J].制造业自动化,2011,33(10):114-115.
2017-03-17)
成学东(1975-),内蒙人,工程师,主要从事设备、设备备件管理工作,Email:836321991@qq.com。
国家高技术研发计划(863计划)课题(2011AA060401).
猜你喜欢
山东冶金(2022年2期)2022-08-08 01:51:54
奋斗(2021年9期)2021-10-25 05:53:02
昆钢科技(2020年6期)2020-03-29 06:39:32
环境保护与循环经济(2017年2期)2017-09-26 11:52:13
中国环境监察(2016年12期)2016-10-24 05:29:22
工业设计(2016年4期)2016-05-04 04:00:30
工业炉(2016年1期)2016-02-27 12:34:13
汽车科技(2015年1期)2015-02-28 12:14:54
凿岩机械气动工具(2014年4期)2014-03-01 04:00:20
凿岩机械气动工具(2014年4期)2014-03-01 04:00:17
