运载火箭姿态控制技术的发展趋势和展望
2017-07-21 05:13张卫东刘玉玺刘汉兵丁秀峰张开宝
航天控制 2017年3期
张卫东 刘玉玺 刘汉兵 丁秀峰 张开宝
1. 上海航天技术研究院,上海201109 2. 上海宇航系统工程研究所,上海201109
运载火箭姿态控制技术的发展趋势和展望
张卫东1刘玉玺2刘汉兵2丁秀峰2张开宝2
1. 上海航天技术研究院,上海201109 2. 上海宇航系统工程研究所,上海201109

对国外运载火箭的姿态控制技术发展进行了梳理。根据国外运载火箭姿控技术的发展趋势,并结合国内运载火箭的发展方向,提出了几种可能应用于国内运载火箭的姿态控制方法,并给出了这几种姿态控制技术的工程实现方法和途径。分析表明,这几种控制方法对克服火箭参数不确定性、提高火箭姿控系统的鲁棒性具有明显优势。 关键词 运载火箭;姿态控制;发展趋势;工程实现
运载火箭作为将有效载荷送入太空的主要运输工具,已得到长足发展。根据所运输的有效载荷的需要,它逐渐由串联向并联、简单向复杂的方向发展。国外运载火箭中,比较典型的有土星V、航天飞机、Atlas、阿里安和战神等运载火箭[1]。国内运载火箭由CZ-3,CZ-4发展到新一代运载火箭[2],其发展趋势是长细比加大、捆绑的助推器增大。本文根据国内外运载火箭的发展趋势以及碰到的问题,论述了运载火箭姿态控制技术的现状及其发展趋势。
国内外运载火箭普遍采用PID控制,根据飞行时间段调整PID参数。PID控制在土星5、航天飞机和战神火箭中广泛采用。PID控制成为运载火箭的主流控制方法,主要原因有2点:1)PID控制方法继承性好,能进行裕度分析;2)运载火箭基本按照预定轨迹飞行,不做大的机动,可以进行三通道独立设计,而这种单输入单输出系统,PID控制比较实用,且理论分析方法成熟,能满足运载火箭飞行的姿控要求。国外运载火箭在进行姿控设计时,在PID控制基础上进行了改进,如阿里安火箭在此基础上采用了主动减载控制技术,战神火箭在此基础上采用了抑制起飞漂移控制方法等[3]。
此外,随着运载火箭任务类型的增加和现代控制理论的发展,很多学者将先进的控制理论方法引入到运载火箭姿态控制方法中,尤其是20世纪90年代,NASA的马歇尔空间飞行中心根据X33飞行器的起飞和再入特点,开展了先进制导与控制方法的研究[4],其目的是扩展火箭的飞行条件、参数变化范围和任务剖面,以及在出现故障的情况下进行自适应控制。学者们根据这一计划,研究了轨迹线性化控制[5]、神经网络自适应控制[6-7]和变结构控制[8]。本文通过梳理国外运载火箭姿态控制的研究情况,结合我国运载火箭发展趋势和碰到的问题,提出几种可能应用到工程实际中的姿态控制方法。
1 运载火箭姿态控制面临的问题
随着运载火箭长细比增加、整流罩变大,其姿态控制面临以下几个问题:
1)静不稳定性增大。由于载荷变大,整流罩的尺寸逐渐加大,气动压心距离箭体理论尖端较近,与箭体质心距离较远,导致火箭的静不稳定性增大。对于静不稳定性较大的火箭,在下限状态下很难控制,容易出现姿态发散;
2)参数不确定性增大。在整个飞行过程中,运载火箭的质量、转动惯量、气动力、晃动力和弹性模态变化都非常大,即火箭的姿控参数变化较大,火箭存在较大的参数不确定性。如何保证参数不确定性较大情况下的姿态稳定,是目前火箭姿控设计中普遍遇到的问题;
3)运载火箭的弹性控制问题。为了追求更大的运载能力,火箭的结构质量越来越轻,导致火箭的弹性体特征更加明显。使火箭的一阶弹性频率与刚体控制频率更加接近,弹性设计愈加困难;
4)运载火箭的滚动控制问题。随着发动机推力的加大,火箭一级采用一台发动机控制,或者助推分离后由一台发动机控制。由于一台发动机双向摇摆只能控制俯仰和偏航通道,滚动通道则需要另配一套动力装置,一般采用姿控喷管进行非线性控制。由于火箭一级飞行时经过稠密大气和稀薄大气两个阶段,不同阶段的干扰构成不同,对控制力矩的要求也不同,这都给非线性滚动控制带来新的问题。
2 运载火箭姿态控制方法
上面列举的这些问题,是国内外运载火箭发展过程中需要解决的问题。针对这些问题,主要采取的措施有运载火箭减载控制、蒙特卡罗频域分析方法、自适应控制、变结构控制和滚动通道的非线性控制方法等,下面具体分析这些方法。
2.1 减载控制
目前主流的减载控制方法是主动减载控制技术,该技术在国外运载火箭中普遍采用,国内新一代运载火箭研制过程中也逐渐采用了该技术。下面给出几种主动减载控制的方法。
2.1.1 基于估算攻角的方法
火箭飞行过程中,测量姿态角和角速度,并引入控制方程。该控制方法能减小姿态误差,但无法减小攻角,无法使载荷明显变小。如果控制方程引入攻角,则有:
(1)
由于攻角很难通过测量获得,因此式(1)很难实现,但可以间接通过估算方法获得火箭飞行攻角。攻角α可以通过惯组加表间接测量获得。惯组中加表的测量值如下:
(2)
(3)
由于k1,k2和k3等参数依赖箭体参数,而这些参数在实际飞行中具有较大的不确定性,所以这种通过间接估算获得攻角的方法误差较大。
2.1.2 基于过载控制的方法
该方法是从减小横向过载控制的角度考虑,将过载信号直接引入到控制方程。具体的控制方程为
(4)

(5)
(6)
考虑到Δα=Δφ,则式(5)和(6)进一步写为
(7)
令:


则式(7)写为
进一步,有
(8)
(9)
式(8)和(9)即为由平稳风引起的火箭攻角和发动机摆角。
2.2 刚弹稳定性及其频域分析方法
为了提高运载能力,火箭长度逐渐增大,使得长细比增大,全箭的一阶弹性频率进一步减小,导致一阶弹性频率与刚体的控制频率比较接近。而运载火箭姿控设计中,全箭的一阶弹性频率的大小对姿控设计的影响很大,因此,常将全箭一阶弹性与控制系统截频的比例关系作为姿控设计的一个关键性指标。该指标用于衡量刚体与弹性频率之间的耦合关系。姿控系统设计时,需要综合考虑这2个频率的比例因子,即模态耦合率进行网络设计,如果比例因子太小,则网络设计难度较大。从国外运载火箭的设计情况看,一般都大于5,见表1。因此当全箭的频率较低时,需要将刚体的截频设计得适当小些。
一阶弹性频率与刚体控制频率比较接近,控制系统可能激励弹性模态,使系统失稳。同样,一阶弹性模态在低频段产生相位滞后,容易引起相位不稳定。对于该情况,需要通过选择速率陀螺的安装位置来提供适当的相位,从而增强飞行控制系统的鲁棒性。由于该方法与箭体动力学参数密切相关,因此需要动力学模型参数非常准确。其中,结构动力学参数需要通过有限元建模、模型分析获得,气动参数通过气动试验获取。在模型参数能够准确获得时,可以适当减小参数偏差。
这2个频率中,一阶弹性频率主要由火箭本身固有的质量特性、刚度特性确定,而控制系统截频除了与箭体本身的质量特性、发动机配置有关外,还与静态放大系数的选取有关,当箭体本身的一阶弹性频率较小时,可以通过适当减小静态放大系数,使刚体截频减小,拉开刚体截频与一阶弹性频率之间的距离,便于姿控系统设计。但静态放大系数不能调整得太小,否则影响系统的动态特性,表现在系统的相位裕度变小,系统克服干扰能力变差。此外,还要综合考虑刚体截频、全箭一阶弹性频率和伺服系统小回路频率之间的对应关系。
火箭设计时,稳定裕度一般都有一定的要求。从国外的资料看,一般要求刚体、弹性的幅值裕度大于6dB,刚体相位裕度大于30°,而弹性的相位裕度大于45°。目前,国内对运载火箭进行稳定裕度分析时,都要考虑上、下限,而上、下限的构成模式是固定的,例如,在下限时,控制力矩系数取下偏差,而气动干扰力矩系数取上偏差。但这种处理方式有局限性,尤其是参数不确定性较大、弹性频率比较低的情况,这种固定形式的频域分析方法,其覆盖性不全面。目前国外运载火箭研制中,逐步采用蒙特卡罗打靶方法,在考虑各种偏差的情况下进行稳定裕度分析。我国新一代运载火箭,尤其是重型运载火箭的研制中,由于弹性频率低,火箭飞行中参数不确定性大,因此考虑采用蒙特卡罗打靶的方法进行频域分析。
2.3 模型参考自适应控制
尽管PID控制方法简单可靠,理论分析体系完善,但其对参数不确定的适应性有限,工程上主要采用校正网络以使系统有一定的稳定裕度,当干扰较大时系统的动态特性变差。因此,一些先进的控制方法得到了广泛的研究,尤其是在重复使用运载火箭或者一次性火箭飞行过程中,受到较大的参数不确定性和考虑未建模动态时,先进的控制方法体现出它的优势。由于经典PID控制和现代控制方法各有优缺点,很多学者将二者的优点结合,应用在运载火箭姿态控制上。其中,自适应控制与经典的PID控制的结合是一个研究方向,它不但能提供裕度指标,还能补偿系统受到的外干扰和未建模动态,这样比用固定增益的PID控制有更强的鲁棒性。下面给出一个PID控制和模型参考自适应控制相结合的控制方案,见图1。
图1 PID与模型参考自适应联合控制框图
图1为PID控制与模型参考自适应联合控制方案。首先设立一个参考模型,该模型可以模拟火箭理想情况下的输出特性,火箭飞行过程中,其输出特性与理想的输出特性比较,其差值进入自适应控制器,自适应控制的输出与PID控制的输出共同作用在箭体动力学模块,使箭体的姿态角与参考模型的输出逐渐接近,最终达到理想的跟踪效果。这种控制方法可以应用在火箭上升段气动参数变化较大的区域,也可以应用在重复使用运载器的再入段。应用该方法时,需要通过李亚普诺夫理论证明系统的渐进稳定性。
2.4 滑模变结构控制
滑模变结构控制具有响应速度快、对模型参数变化和外部扰动不灵敏、无需系统在线辨识、物理实现简单等优点,因而得到广泛的应用。火箭飞行过程中,参数实时变化,外部干扰源和干扰类型较多,因此可以利用变结构控制的特点,提供系统的鲁棒性。下面给出一个双回路的滑模变结构控制方法。
火箭的动力学模型为
(10)
(11)
(12)
欧拉角转换方程为
(13)
(14)
(15)
忽略二阶小量,将式(10)~(12)表示为
(16)
(17)
(18)
(19)
(20)
取滑模面为
s=k1x1+x2
(21)
采用指数趋近律

(22)
对式(21)求导,有
(23)
联立式(22)和(23)即可获得控制输出δφ。
2.5 非线性滚动控制方法研究
火箭配置一台摇摆发动机控制俯仰和偏航通道,滚动通道采用非线性滚动控制方案。由于火箭飞行的不同阶段产生的滚动干扰力矩不同,因此在姿控喷管配置时要兼顾考虑。滚动通道的干扰主要与气动力、发动机控制力和箭体的质心横移量有关,同时与箭体的气动外形有关。因此采用喷管进行滚动控制时,一定要严格控制质心横移量,箭体气动外形要对称布局,减少气动滚动干扰力矩的影响。
非线性滚动控制方法采用相平面的控制方法,相平面控制方法根据滚动角和滚动角速度共同确定,见图2。
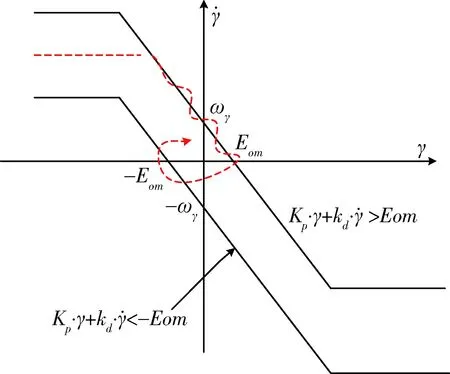
图2 相平面控制方法
相平面轨迹可以通过式(24)和(25)描述,
(24)
(25)
滚动角由单位时间的滚动角速度增量确定,滚动角速度由单位时间内滚动角加速度增量确定。由图2可见,滚动控制力矩使滚动角和滚动角速度在限定的范围内。由于相平面极限环的存在,系统将在极限环范围内振荡运行。
(26)
3 结论
随着运载火箭技术的发展和现代控制理论的逐步完善,将先进的控制方法应用在运载火箭姿控技术上是一种发展趋势。本文结合国外运载火箭姿控技术的发展情况,对可能应用于运载火箭的姿控技术进行梳理和展望。主动减载控制、频域分析的蒙特卡罗打靶方法、非线性滚动控制方法、模型参考自适应控制和变结构控制都有非常广阔的应用前景。
[1]MarkS,Whorton,CharlesEHall,etal.AssentFlightControlandStructuralInteractionfortheAres-ICrewLaunchVehicle[C].AIAA/ASME/ASCE/AHS/ASCStructures,StructuralDynamicandMaterialsCon.23-26April2007,Honolulu,Hawaii. 1-13.
[2] 吴燕生,何麟书.新一代运载火箭姿态控制技术[J].北京航空航天大学学报,2009,35(11):1294-1297. (WuYansheng,HeLinshu.AttitudeControlTechnologyofNewGenerationLaunchVehicles[J].JournalofBeijingUniversityofAeronauticsandAstronautics,2009,35(11):1294-1297.)
[3]Jiann-WoeiJang,AbranAlaniz,RobertHall,etal.AresIFlightControlSystemDesign[J].AmericanInstituteofAeronauticsandAstronautics,2010-35660,August2010, 1-14.
[4]JamesEStott.LaunchVehicleAttitudeControlUsingHigherOrderSlidingModes[C].AIAAGuidance,Navigation,andControlConference,August2010,Toronto,OntarioCanada.1-14.
[5]HuizengaA,BevacquaT,FisherJ,etal.ImprovedTrajectoryLinearizationFlightControllerforReusableLaunchVehicles[C].42ndAIAAAerospaceScienceMeeting,Reno,NV,January2004,AIAA2004-0875.1-12.
[6]JohnsonM,CaliseT,JohnsonE.EvaluationofanAdaptiveMethodforLaunchVehicleFlightControl[C].ProceedingsofAIAAGuidance,NavigationandControlConference,Austin,TX,August2003:1-11.
[7]JohnsonE,CaliseT,El-ShirbinyH.FeedbackLinearizationwithNeuralNetworkAugmentationAppliedtoX-33[C].AttitudeControl,ProceedingsofAIAAGuidance,NavigationandControlConference,Huntsville,AL, 2000,(7): 16-19.
[8]ShtesselY,StottJ,ZhuJ.Time-VaryingSlidingModeControllerwithSlidingModeObserverforReusableLaunchVehicles[C].AIAAGuidance,Navigation,andControlConferenceandExhibit,Austin,Texas, 2003(8):1-14.
Development Trend and Prospect of Attitude Control Technologies of Launch Vehicle
Zhang Weidong1,Liu Yuxi2,Liu Hanbing2,Ding Xiufeng2, Zhang Kaibao2
1. Shanghai Academy of Spaceflight Technology, Shanghai 201109, China 2. Shanghai Aerospace System Engineering Institute, Shanghai 201109, China
Thedevelopmentofattitudecontroltechnologiesofoverseaslaunchvehiclearereviewedinthepaper.Accordingtothedevelopmenttrendofoverseaslaunchvehicleandthedevelopmentdirectionofdomesticlaunchvehicle,severalattitudecontrolmethodsareproposed,whichwillbeappliedtothedomesticlaunchvehicleinthefuture.Theapproachesandwaysofengineeringrealizationareintroduced.Thetheoryanalysisshowsthemethodshavevirtuesforovercomingtheuncertainparametersandimprovingtherobustness.
Launchvehicle;Attitudecontrol;Developmenttrend;Engineeringrealization
2016-08-08
张卫东(1958-),男,山东济宁人,研究员,主要研究方向为运载火箭总体设计、动力学与控制等;刘玉玺(1973-),男,黑龙江嫩江人,博士,高级工程师,主要研究方向为导航、制导与控制;刘汉兵(1967-),男,江苏南通人,研究员,主要研究方向为运载火箭导航、制导与控制;丁秀峰(1968-),女,南京人,研究员,主要研究方向为运载火箭制导、动力学与控制;张开宝(1985-),男,安徽芜湖人,硕士,工程师,主要研究方向为运载火箭姿态控制。
V448.1
A
1006-3242(2017)03-0085-05
猜你喜欢
装备制造技术(2021年1期)2021-05-21
自动化学报(2018年2期)2018-04-12
通信电源技术(2016年4期)2016-04-04
北京航空航天大学学报(2016年3期)2016-02-27
西北工业大学学报(2015年4期)2016-01-19
空间控制技术与应用(2009年2期)2009-12-20