北斗全球系统自主导航地面模拟测试系统设计与实现
2017-07-18 11:00:02贾卫松王海红燕洪成曾连连
航天器工程 2017年3期
贾卫松 王海红 燕洪成 曾连连
(北京空间飞行器总体设计部,北京 100094)
北斗全球系统自主导航地面模拟测试系统设计与实现
贾卫松 王海红 燕洪成 曾连连
(北京空间飞行器总体设计部,北京 100094)
针对北斗高精度自主导航性能指标的测试验证,设计了支持北斗全球系统星座的自主导航地面模拟测试系统。利用标准航天器链路通信终端接入星载自主导航计算机,实现以远程仿真测试服务器为核心的模拟测试系统架构,从通信机制、时间同步策略、结果评估方法等方面阐述系统设计原理。工程实践结果表明:文章设计的自主导航地面模拟测试系统,支持在模拟建链场景及误差源的条件下对卫星自主导航进行“跑合”验证,可应用于北斗全球组网卫星设计、测试及在轨运行阶段。其设计方法对其它卫星自主智能任务的测试系统构建亦具有借鉴意义。
北斗全球系统;自主导航;地面模拟测试系统
1 引言
高精度自主导航是新一代全球卫星导航系统的发展趋势,可使导航系统在一段时期内完全脱离地面运控系统并继续给用户提供精确导航服务[1]。1997年后发射的GPSII-R及后续GPS卫星都具有星间链路功能,初步具备自主导航能力。我国北斗全球系统自主导航通过星间双向测距、数据交换以及星载处理器滤波处理,不断修正地面站注入的卫星长期预报星历及时钟参数,并自主生成导航电文和维持星座基本构型[2],可支持60天在轨自主运行[3],增强系统的生存能力。由于空间环境的影响,星载计算机处理器运算能力较低,在工程实现中需要持续优化算法设计,实现兼顾输出电文精度和满足卫星硬件资源的目标。自主导航算法的地面验证过程应全面考虑影响导航性能的环境因素和硬件效应。目前国内针对基于星间测量的自主导航技术局限于通过软件仿真进行研究与评估。南京航空航天大学等针对基于星间测量的星座自主导航进行研究并实现仿真系统[4],但其仅利用局域网通信的计算机仿真出星座自主导航系统的运行过程,不具备与真实卫星设备的对接及系统验证能力。基于星间测量的自主导航在卫星物理实物平台中的验证技术领域尚属空白。
本文以北斗全球系统卫星研制为背景,设计了自主导航地面模拟测试系统,在设计阶段即可模拟整星软硬件环境,实现自主导航长期可靠性“跑合”(指系统组装完成后,按事先设计规程进行的运转试验),具备从设计到在轨的全生命周期的扩展应用能力,充分验证北斗高精度自主导航性能指标。
2 问题分析与设计原则
北斗全球系统自主导航算法复杂,接口信息繁多,组网卫星之间时序配合精确,具有如下特性:
(1)自主导航计算机处理器及存储器的选用受到空间环境限制,但在有限的运算精度、处理能力和存储资源条件下必须保证导航服务的性能指标。
(2)运行于较高轨道的北斗导航卫星易于受到单粒子效应影响触发设备复位或切机故障,在自主运行60天期间需要自主快速恢复。
(3)时分体制的星间网络为自主导航提供通信链路资源和测量信息,但在轨的星间几何构型及路由算法必须保证较小的位置精度因子,提高定位精度。
为此北斗自主导航技术需要在地面进行充分的测试与验证。然而单纯采用软件模型仿真的方法仅能验证算法理论,无法证明其在卫星实物平台工程实现的可行性与正确性;作为正在快速发展的卫星自主智能的代表,北斗自主导航信息综合性强的特点,导致传统的激励-反馈模式的测试方法失效;北斗全球组网批产的快节奏,导致在整星测试阶段及分系统测试阶段没有资源供给自主导航进行长期“跑合”可靠性测试,这些均成为地面验证的难题。
针对自主导航的在轨特性及测试验证中遇到的问题,北斗全球系统自主导航模拟测试系统在构建时遵循以下设计原则:①扩展性:以最小的设备集合实现最完整的功能包络,尽量在单机阶段完成全面验证及长期可靠性“跑合”,同时进行标准化接口设计,灵活扩展支持分系统及整星测试,使软件设计、单机验证、整星测试全生命周期场景一致。②通用化:验证全球组网星座级自主导航信息流及星间星地协议,具备灵活接入中圆地球轨道(MEO)、地球静止轨道(GEO)和倾斜地球同步轨道(IGSO)三类轨道卫星的能力。③集成化:融合软硬件实物平台与全星座虚拟仿真平台,集成运控、星间链路[5]及测控多通道信息模拟与处理。④自动化:支持60天无人值守运行,自主完成数据分析及跟踪评估。
3 技术方案
北斗全球系统自主导航地面模拟测试系统以北斗全星座卫星自主导航仿真为基础,模拟测控系统、运行控制系统及星间链路系统,引入卫星钟差、星间测距时延、收发天线相位中心至卫星质心的修正量等误差因素,建立在轨真实环境的半实物模拟测试平台。基于航天器工程建设中设备接口繁多和信息类型庞杂的特点,本节从系统架构和信息流设计两方面对方案进行论述。
3.1 系统架构设计
自主导航软件运行于星载计算机,由导航载荷、测控应答机和星间收发信机构成外部通道环境,由北斗星座组网构成空间链路环境,因此在模拟测试系统设计中,利用标准航天器链路通信终端替代链路设备,以仿真测试服务器建立仿真星座,实现图1所示的以服务器为核心的模拟测试系统架构。

图1 模拟测试系统架构Fig.1 Architecture of simulation and test system
1)仿真测试服务器
北斗自主导航技术的基础是全球组网,由网络中的卫星节点之间测量通信并分布式计算[6]实现精确定位。作为控制中心,仿真测试服务器构建了北斗全球系统星间及星地网络,利用通信终端实现与自主导航计算机交互信息,并具备直接与整星对接的扩展能力。服务器实现全星座卫星分布式自主导航的仿真,集成地面测控站、地面运控主控站及Ka频段锚固站模拟功能,基于以太网定制服务协议链接各通信终端。通信终端通过卫星电缆与自主导航计算机进行信息交互,将自主导航计算机实物目标接入至仿真星座网络中。与整星对接时,测控应答机、相控阵收发信机及导航载荷替代通信终端,通过整星电缆网与自主导航计算机通信。在服务器外围配套中频处理机和射频上、下变频器,实现与相控阵收发信机通信,配套网络交换机与整星测控前端及运控前端通信,建立测控、运控及星间通道,将被测卫星接入至仿真卫星网络,服务器通过更换底层驱动,实现整星测试设备拓扑下的通信功能扩展。服务器提供可视化界面,远程控制卫星自主导航的运行,实时监视接口状态及算法运算过程,对下行播发的星历及钟差结果进行跟踪评估。
2)测控通信模拟
模拟系统针对测控通道设计了测控通信终端。通过模拟卫星应答机系统,将在远程仿真测试服务器产生的遥控指令数据,通过信号协议转换转发至自主导航计算机的遥控接口,实现卫星时间校正、星间网络拓扑及路由配置等控制功能。自主导航计算机产生的实时遥测数据,通过遥测接口发往测控通信终端,经解析后发送至远程仿真测试服务器。仿真测试服务器根据软件状态及结果遥测实现过程自动化判读,监测卫星运行状态。
3)运控通信模拟
导航卫星载荷设备负责主控站注入的运控信息业务数据的处理及转发,模拟卫星载荷的运控通信终端接收仿真测试服务器中模拟主控站的注入信息,转化为星载接口业务格式,通过信号协议转换注入至自主导航计算机。自主导航计算机从运控通信终端获取启动电文参数及运行周期、拟合时长等控制信息,并将计算产生的自主导航电文及完好性信息,通过运控通信终端播发至远程仿真测试服务器。
4)星间链路通信模拟
相控阵收发信机与自主导航计算机之间的星载接口业务,由星间链路通信终端模拟。终端将远程仿真测试服务器产生的本星测量帧及星间自主导航业务数据帧,提交给自主导航计算机,把自主导航计算机产生的自主导航星间业务数据帧,转发给仿真测试服务器。
3.2 信息流设计
按路径区分,北斗自主导航地面模拟测试系统内信息传输,可分为星内路径和星间路径,均以北斗标准协议帧为载体,为星载自主导航计算机构建真实外部环境。出于兼容性设计,星内的信息流在整星测试阶段真实设备加入后可灵活隔离。按信息区分,传输的信息可分为控制类信息和计算信息,控制类型信息便于系统状态感知与维护,计算信息则作为北斗全球系统自主导航算法周期迭代的基础。
以被测卫星自主导航计算机为中心进行分析,可以得到星地遥控、星地遥测、星内时间业务、星间发送、星间接收、星内接口业务、星地运控注入、星地运控用户数据下发共8条路径,涵盖功能控制信息、卫星及网络健康状态、北斗时基准、电文、协方差、双向伪距测量、用户星历、用户钟差及完好性结果等信息。由于涉及多种数据类型,在设计时需针对每类业务信息路径进行分析,保证信息覆盖完整且时序无冲突。以星间路径为例,自主导航电文、星历星钟协方差、全星座伪旋转修正定向参数、单向伪距测量值在北斗时分复用网络中,需要根据建链关系定时启动星间交互,于算法处理之前汇聚分布式数据集合,要求系统部件之间以严格的时序通信,避免跨运行周期的数据错乱。而星内接口业务涵盖的本星伪距测量值的收集、用户星历星钟的传输、网络状态数据的发布等,与星间路径中的信息时序形成严密的配合,覆盖自主导航全部输入输出。各应用业务类型在设备间的信息流如图2所示。

图2 业务信息流图Fig.2 Service information flow diagram
4 设计原理
通过系统架构和信息流的设计过程可以看出,自主导航模拟测试系统涉及了整星所有信息通路及业务类型,涵盖了星载接口业务和星座组网路由关键技术。从系统设计角度,利用有限的地面设备资源建立精确的星间通信机制和系统唯一的时间基准,是对星座运行真实模拟的难点;从功能目的角度,自主导航性能评估方法和长期可靠性“跑合”的自动化处理,是决定系统成败的关键;从虚实融合的角度,仿真测试服务器的设计方法,是决定系统扩展性、通用性和构建北斗网络分布式计算环境的核心。
4.1 星间通信机制
北斗导航卫星星间通信采用时分复用通信机制,以n×1 s为时间粒度进行星间信息交换。在自主导航工作周期内,以星间双向测距信息作为轨道卡尔曼滤波输入,通过导航网络完成星间测量值、测距修正量、电文等自主导航信息交换,各卫星节点利用收集的信息完成分布式自主导航算法计算。
北斗自主导航地面模拟测试系统,完全模拟在轨运行的北斗星间通信的协议及时序,利用以太网替代空间信号传输,利用通信终端替代物理层的测控应答机、相控阵收发信机等编码与同步层设备,星间伪距生成组件仿真产生双向测距,并根据用户配置参数灵活动态,引入钟差参数、电离层干扰、相对论效应和硬件通道时延。
模拟测试系统仅建立链路层及以上层级的通信,减少了对信机等卫星通信物理层设备的依赖,使系统架构更为简洁,利于降低自主导航验证成本。
4.2 时间同步策略
北斗全球系统的星地之间、卫星之间和星内各设备之间时间严格同步,为用户提供高精度位置和时间服务。在测试系统中,仿真卫星与被测卫星实时通信并同步向后推算,时分复用的通信机制要求在精简的半实物的北斗仿真星座中也建立唯一的时间基准。然而星载自主导航计算机仅能通过测控通道授时,且测控信息在经过测控通信终端及以太网传输过程中存在秒级时延,使测试系统与卫星之间同步困难。因此模拟测试系统创新地采用时间码与秒脉冲分别同步的环形校正方法,星间链路通信终端作为秒沿基准,而自主导航计算机作为北斗时时间码基准,如图3所示。

图3 时间环形校正法示意图Fig.3 Schematic diagram of time loop synchronization method
星间链路通信终端模拟北斗导航卫星的原子钟产生时频脉冲,接入至自主导航计算机。星载自主导航计算机每秒向星间链路通信终端播发当前北斗时。当星间链路通信终端接收到卫星北斗时,将其调制为IRIG-B(DC)时间码格式[7]。仿真测试服务器插装标准IRIG-B时间接收卡,识别时间码元及前沿,实现与北斗时的秒脉冲及时间精确同步。通过测控通道注入卫星校时指令,即可实现北斗自主导航模拟测试系统各设备间时间同步,时间同步精度误差小于1 ms,满足时分通信要求。
4.3 结果评估方法
结果评估方法以自主导航性能指标的验证为导向。除正常使用模式外,为加快验证系统完好性的进程,模拟测试系统还设计了自测试模式。在自测试模式下,仿真测试服务器独立运行北斗星座,仿真卫星之间交换单程测距信息及星历信息、分布式运行自主导航算法并按倍频的工作周期迭代运算。在正常模式下被测卫星加入模拟测试系统后,与被测卫星同轨位的仿真卫星进入隔离模式,仅接收其他卫星发来的测距和电文,保持周期性运行。被测卫星替代同轨位仿真卫星接入仿真星座。被测卫星产生的电文及完好性信息会在下一个工作周期被仿真星座内其他卫星使用。
北斗自主导航的精度取决于伪距和载波相位测量值及广播导航数据的质量,其误差是由控制段、空间段和用户段所引起的。模拟测试系统重点针对控制段和空间段的误差对精度性能的影响进行评估。由于被测卫星节点及仿真卫星节点所输入的测量值、星历及钟差信息,均源自仿真测试服务器的算法组件,输出电文结果的误差与模拟测试系统设备无关,仅与测距生成时用户配置的硬件通道时延、钟差、电离层参数及几何因子(DOP)相关。导航卫星通常将误差源归属到各颗卫星的伪距中,看成是伪距值中的等效误差[8],因此本系统以数据龄期(AOD)取值0~120 min的星历用户伪距误差(URE)和钟差作为评估值。根据系统使用模式,提取自主导航结果评估的8个项目如表1所示。

表1 结果评估项目
4.4 自动化处理方法
自动化处理是自主导航60天长期“跑合”的支撑技术,由测控通信终端和运控通信终端配合完成,实现一键式自动化测试。系统运行过程可分解为初始化参数配置、时间同步、监测评估、故障恢复环节。为实现无人值守的目标,通过远程仿真测试服务器访问运控通信终端,注入长期预报星历、启动星历及钟差等参数;利用仿真测试服务器访问测控通信终端,操作开启被测卫星星间网络业务及天线指向业务并同步星地时间;过程监测及评估结果自动录入数据库,并通过图形界面实时显示;当系统发生故障时,进行错误报警并恢复。故障恢复环节与时间同步和初始化配置紧密结合:服务器通过载荷星内接口业务向星载计算机实时播发北斗时,当星载计算机故障复位时,根据服务器提供的北斗时基准恢复星上时间,维持系统时间同步,被测星与仿真星利用最后一次正确的计算结果继续运行;若对卫星进行校时,系统根据环形校正法跟随星载计算机中维护的北斗时,实现星座自主导航在外部干扰情况下全自主运行。
4.5 仿真测试服务器设计方法
仿真测试服务器集成北斗地面模拟测试系统的全星座虚拟仿真与测试中枢,采用分层结构,可划分为用户接口层、系统功能层和运行支持层,如图4所示。
用户接口层提供面向系统测试技术人员的交互界面,提供遥控及运控上行操作接口,接收并显示遥测信息及导航载荷播发信息,进行仿真测试场景或运行参数的配置,设置星座配置、卫星连接关系、协议参数等属性,在测试过程中动态显示网络仿真及算法运行的状态,并根据定制方式生成评估结果的图形化显示。

图4 仿真测试服务器架构Fig.4 Architecture of the simulation and test server
系统功能层由执行仿真计算及协议转换的核心组件构成,将用户接口层的配置信息以配置文件导入各仿真组件并执行,将组件执行状态、过程数据及评估结果文件保存于数据库。利用星座轨道仿真组件产生北斗星座网络中每颗卫星的位置坐标,利用自主导航计算组件模拟全星座卫星节点,利用网络路由仿真组件形成建链关系和路由规划,利用星间交互信息生成组件实现星间数据产生与接收,利用测控协议组件及运控协议组件为用户支持层提供操作与显示服务,利用测试评估计算组件对星历及钟差精度、链路使用率等性能进行评估。
运行支持层提供各组件与外部信息交互的底层支撑环境及数据存储、查询功能。接收外部时间信号,为各层业务提供时间基准,同时将卫星标准协议帧封装于定制的模拟测试系统协议帧中,实现与各链路终端的通信。
分层设计方法保证了轨道计算、建链路由规划和自主导航算法的构件封闭性和动态加载能力。此外,在单机交付整星测试时,仅需替换运行支持层的终端通信协议,即可实现模拟测试系统的向后兼容。
5 应用与验证
在单机测试阶段,利用北斗全球系统自主导航地面模拟测试系统建立空间应用环境,通过仿真测试服务器模拟北斗全星座卫星,引入钟差、时延等误差源,对在星载计算机中运行的自主导航算法进行性能评估,同时对模拟测试系统的通用性、集成化、自主运行稳定性进行考核。验证条件如表2所示。
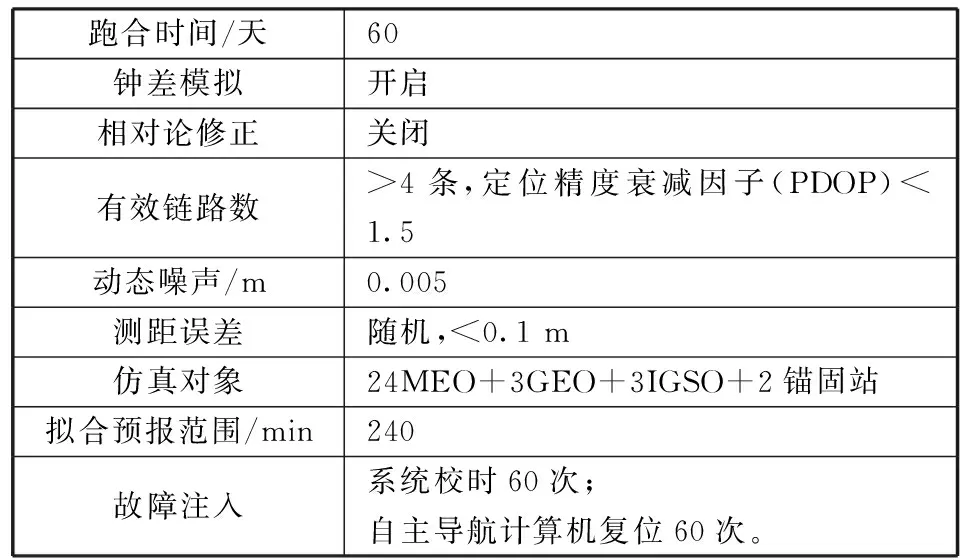
表2 验证条件
测试结果表明:北斗自主导航地面模拟测试系统能够通过可视化界面实时监测星载自主导航计算过程,具备灵活接入MEO、GEO、IGSO和地面锚固站的能力,可全覆盖验证自主导航信息流及星间星地标准协议。在故障注入的条件下自主运行60天后,以秒脉冲为基准的经过自动化处理设计的模拟测试系统仿真卫星与被测卫星保持时分建链,严格按照网络时序同步通信。结果评估的8个项目均满足北斗自主导航指标要求,其中仿真星及被测星的星历URE差值小于1 m,说明星上针对受限的硬件资源优化后的自主导航算法精度指标与仿真卫星一致,达到预期的验证效果。全星座星历URE评估结果如图5所示。
在整星测试阶段,去除模拟测试系统中的各通信终端,修改仿真测试服务器运行支持层,实现了与整星扩频应答机、相控阵收发信机及导航载荷设备的有线对接。地面模拟测试系统功能扩展后完成星-星-地联合自主导航测试,验证结果与单机测试结果相同。

图5 全星座星历URE-RMS评估结果图Fig.5 Evaluation results of URE-RMS of the constellation
在轨应用阶段,根据地面模拟测试系统复建空间工作场景,通过卫星遥测获知固定时间段的真实星间伪距测量信息、全星座自主导航电文信息、网络建链拓扑及路由信息,形成配置文件。将配置文件加载于仿真测试服务器的星间交互信息生成模块,为仿真星及地面真星提供输入。仿真星及地面真星完成自主导航计算后与在轨卫星进行自主导航电文结果比对,实现在轨与地面双向印证的目的。若在轨自主导航性能指标不理想,亦可通过模拟测试系统验证自主导航升级版软件后执行在轨维护。系统的可扩展性为自主导航设计、测试及在轨全周期的验证一致性提供保障。
6 结束语
本文从北斗高精度自主导航性能指标的测试验证的需求出发设计北斗自主导航地面模拟测试系统,论述了系统设计原则与架构,研究了星间通信机制、时间同步策略、结果评估方法等设计原理。系统在60天自主运行期间基准钟差不超过1 ms,仿真星和实物星URE差值小于1 m,具备超出60次复位及校时的故障恢复能力,支持在模拟建链场景及误差源的条件下对北斗全球系统任意卫星的自主导航任务进行“跑合”验证,可应用于设计、测试及在轨运行阶段。为全球组网卫星自主导航算法优化提供了有效的工具,为未来集中式自主导航的设计验证方法提供参考。模拟测试系统扩展性、通用化、集成化和自动化的设计原则,以及时间同步、结果评估、任务仿真等设计方法,对其它卫星自主智能任务的测试系统构建具有借鉴意义。
References)
[1]王海红.导航卫星星载自主轨道预报技术[J],宇航学报,2012,33(8):1019-1026
Wang Haihong. On-board autonomous orbit prediction algorithm for navigation satellites[J]. Journal of Astronautics, 2012, 33(8):1019-1026 (in Chinese)
[2]帅平,曲广吉,陈忠贵. 导航星座自主导航技术研究[J]. 中国工程科学,2006,8(3):22-30
ShuaiPing, Qu Guangji, Chen Zhonggui. Studies on autonomous navigation techniques for navigation constellations[J]. Engineering Science, 2006,8(3):22-30 (in Chinese)
[3]孟繁智. 星座自主导航关键技术研究[D]. 合肥:国防科学技术大学, 2013
Meng Fanzhi. Research on key techniques of autonomous navigation for satellite based navigation constellation[D]. Hefei: National University of Defense Technology, 2013 (in Chinese)
[4]曹辉. 基于星间测量的星座自主导航研究与半物理仿真系统实现[D]. 南京:南京航空航天大学, 2009
Cao Hui. Research on constellation autonomous navigation based on inter-satellite measurement and implementation of semiphysical simulation system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2009 (in Chinese)
[5]侯振伟,易先清,钟涛, 等. 轮询建链规则下导航卫星信息传输路径选择[J]. 装备学院学报,2015(3):69-73
Hou Zhenwei,YiXianqing, Zhong Tao,et al. Selection of navigation information transmission under the rules of polling chain-built[J]. Journal of Equipment Academy, 2015(3):69-73 (in Chinese)
[6]林益明,秦子增,初海彬,等. 基于星间链路的分布式导航自主定轨算法研究[J]. 宇航学报,2010, 31(9):2088-2094
Lin Yiming, Qin Zizeng, Chu Haibin, et al. A satellite cross link-based GNSS distributed autonomous orbit determination algorithm[J]. Journal of Astronautics , 2010, 31(9):2088-2094 (in Chinese)
[7]贾磊. 基于FPGA的IRIG-B(DC)码解码卡的设计[J]. 计算机测量与控制,2015, 23(6):2143-2155
Jia Lei. Design of FPGA-based IRIG-B (DC) decoder card[J]. Computer Measurement & Control, 2015, 23(6):2143-2155 (in Chinese)
[8]Elliott D, Kaplan Cheristopher, J Hegarty. GPS原理与应用[M]. 2版. 寇艳红, 译. 北京:电子工业出版社,2014
Elliott D, Kaplan Cheristopher, J Hegarty. Understanding GPS: principles and applications[M]. Second Edition. Kou Yanhong, translated. Beijing: Publishing House of Electronics Industry, 2014 (in Chinese)
(编辑:张小琳)
Design of Ground Simulation and Test System of Beidou Autonomous Navigation
JIA Weisong WANG Haihong YAN Hongcheng ZENG Lianlian
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
According to the verification of Beidou high precision autonomous navigation performance, the ground simulation and test system of Beidou satellite constellation is designed. Using the standard spacecraft link protocol terminal to access the on-board autonomous navigation computer, the architecture based on the simulation server is built. This paper expounds the system design principle from communication mechanism, time synchronization strategy, result evaluation method. The engineering practice shows that the system introduced in this paper supports the running-verification of satellite autonomous navigation under the conditions of simulated link scene and error source, and can be used in the stage of design, test and in-orbit operation. The design method can be used as reference for the construction of the test system of other satellite autonomous intelligence tasks.
Beidou satellite constellation; autonomous navigation; ground simulation and test system
2017-05-08;
2017-05-28
国家重大科技专项工程
贾卫松,男,工程师,从事航天器综合电子及自主运行设计工作。Email:kingarthurjs@163.com。
V474.25;V524
A
10.3969/j.issn.1673-8748.2017.03.016
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
作文大王·笑话大王(2023年8期)2023-07-17 04:09:28
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
空间科学学报(2020年3期)2020-07-24 09:23:28
当代陕西(2019年18期)2019-10-17 01:48:50
测绘科学与工程(2017年4期)2017-05-25 01:48:16
健康女性(2017年3期)2017-04-27 21:34:31
儿童故事画报(2016年5期)2017-02-07 20:15:30
都市丽人(2016年12期)2016-12-14 09:54:15
都市丽人(2016年7期)2016-08-03 10:06:05