基于dsPIC30F6010的直流电动机控制系统
2017-07-15 02:35王学福董玉林
科技创新与应用 2017年20期
王学福++董玉林
摘 要:文章的目的是设计实现基于dsPIC30F6010微控制器双闭环直流调速系统,研究数字伺服控制性能及控制方法;找出一种以dsPIC微控制器为核心进行直流调速的具体实现方法。在速度1200r/min进行测试,速度稳态误差2%;轻载情况下,可实现从50 r/min加速到1560r/min无振动调速。系统组成简单可靠,对于大负载应用可通过调整软件PI参数实现。
关键词:直流伺服控制;dsPIC30F6010;PWM技术;PI控制
中图分类号:TM32 文献标志码:A 文章编号:2095-2945(2017)20-0054-02
1 概述
伺服系统隶属于自动控制的一个组成部分,最早是用经典的频率法来分析和设计的,50年代发展了根轨迹法。但这些方法对于多变量时变系统是无能为力的。60年代发展了现代控制理论,适用多变量时变系统,成为计算机在伺服系统设计理论的发展趋向。本文找出一种利用dsPIC30F6010控制直流调速的具体实现方法。从技术实现角度来看,充分发挥dsPIC运算速度快,控制能力强,精度高等优点,能够应用于被控目标要求较高的直流伺服系统,在电机控制领域具有广泛的应用前景。
2 直流电动机的控制系统简介
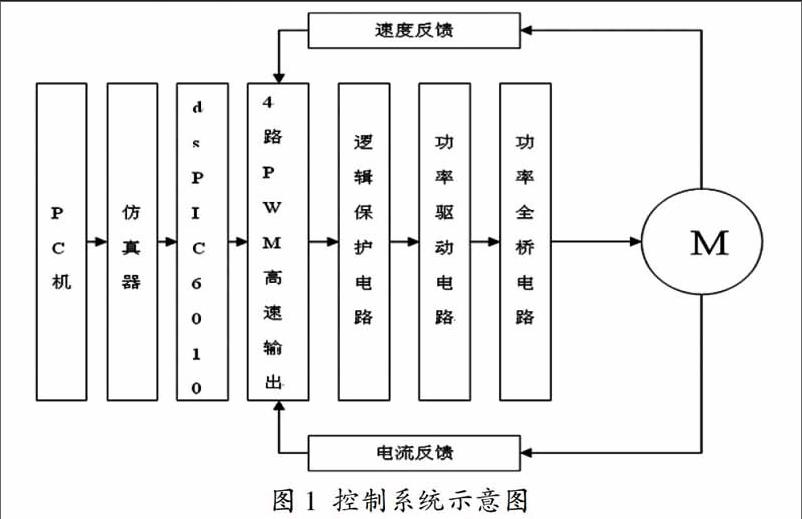
图1是采用dsPIC30F实现的直流电动机控制系统的示意图。在PC机上用MPLAB IDE编写的双闭环程序通过仿真器加载到dsPIC30F6010的芯片中,4路PWM信号经保护电路给功率驱动电路来驱动功率全桥电路,并由功率全桥电路来驱动直流电动机。
3 直流电动机控制系统的硬件设计
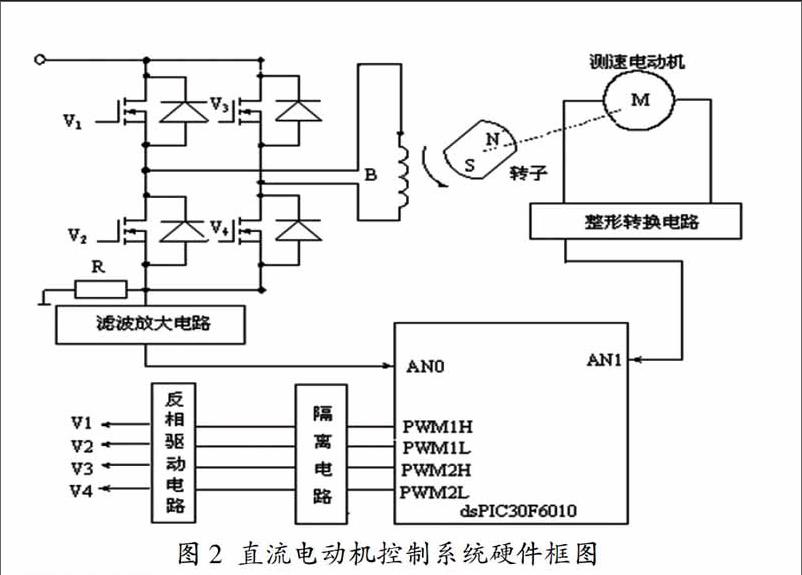
直流电动机控制系统硬件框图如图2所示。控制系统硬件主要由dsPIC30F6010 DSC硬件開发板、驱动电路、直流电动机、测速电动机及信号调理电路四部分组成。
驱动电路主要由光电耦合隔离电路、功率电路、保护电路组成。
3.1 速度信号采集电路的设计
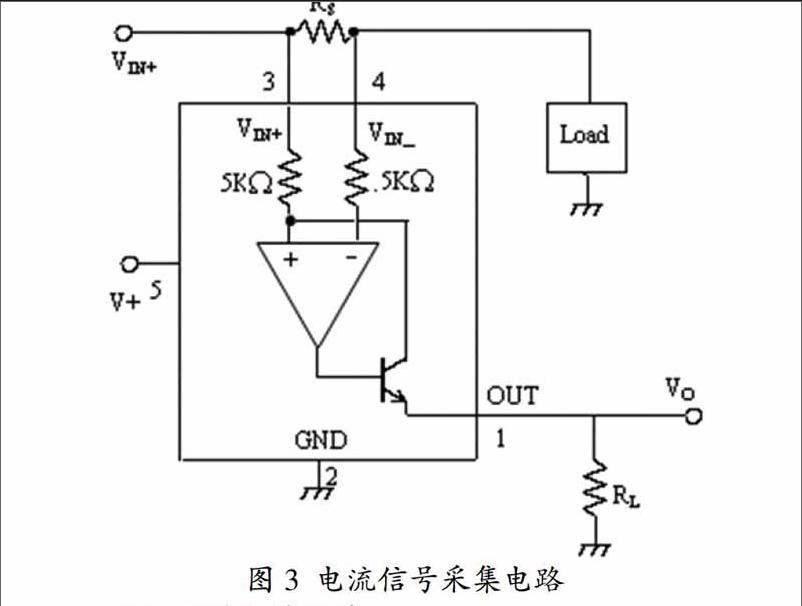
信号采集包括直流电机电流信号采集和测速电机电压信号采集。信号采集电路采用TI(德州仪器)公司的高桥臂电流测量监视器芯片INA168。信号采集电路如图3所示,采样电阻采用2.5m?赘,电机的最大电流为5A,控制器AD输入电压信号为0~5V。按照INA168数据手册应在信号输出端接1M?赘的输出阻抗。
3.2 过流保护电路设计
由三级管和MOSFET共同组成的“泄流”电路共同实现驱动电路和电动机的过流保护。当直流电动机电流过大时,电流检测监视器INA168输出的电压信号经过有反向器组成的施密特触发整形电路后将触发电平信号使三级管和MOSFET导通,迫使直流母线电压降低,以保护驱动电路和直流电动机。电路如图4所示。
3.3 电压平移电路设计
MOSFET起动时,需要给电压平移电容充电。充电动作如图5所示,通过开通下桥臂(N侧)的MOSFET,电压平移电路电容被充电。控制信号应提供足够的脉冲数或脉宽使电压平移电路电容能被完全充电。
4 直流电动机控制系统的软件设计
软件设计分为开环和闭环两部分。其中闭环主要包括转速、电流PI调节;速度、电流采样;双、单极性控制等的设计。图6为电流PI调节子程序框图,从框图中可知防饱和积分PI调节。在实际当中,控制器受到电源额定电压、额定电流、占空比的影响,输出电流不可能达到100%。在这时,要求输出量在一定的范围内,这就要对输出量进行一定限制。
5 结束语
本论文设计是采用基于数字信号处理器(DSP)为核心的数字直流电动机伺服控制系统。本文选用H型PWM驱动方式进行控制,分别用单极性和双极性两种控制方法进行直流电机调速,为高精度直流电机数字控制提供可行性方案。
参考文献:
[1]胡建洲.调速技术的特性及其发展现状[J].石油化工设备,2007,24:47-49.
[2]谭建成.电机控制集成电路的发展[J].微电机,2004,37(5):51-55.
[3]刘陆,杨丽英.基于dsPIC30F6010的无刷直流电动机的控制系统[J],2012,35(23):158-160.
[4]王晓明.电动机的DSP控制-TI公司的DSP应用.[M]北京:北京航空航天大学出版社,2004.
[5]Jong Lick Lin. A new approach of dead-time compensation for PWM voltage inverters[J]. IEEE Trans. on Circuits and Systems I. 2002,49(4):476-483.
猜你喜欢
纺织服装周刊(2022年16期)2022-05-11
物流科技(2022年2期)2022-05-07
意林(2021年4期)2021-03-11
当代体育(2020年17期)2020-09-10
孩子·小学版(2020年6期)2020-02-24
电机与控制学报(2018年9期)2018-05-14
科技创新导报(2017年23期)2017-10-25
山东工业技术(2017年16期)2017-09-05
科教导刊·电子版(2017年18期)2017-07-29
科学与财富(2016年30期)2017-03-31