
基于GNSS信号信噪比观测量的海平面高度变化研究
2017-07-12 16:20王一津俞子恒
海洋预报 2017年3期
胡 媛,刘 卫,周 悦,王一津,俞子恒
(1.上海海洋大学 工程学院,上海 201306;2.上海海事大学 商船学院,上海 201306)
基于GNSS信号信噪比观测量的海平面高度变化研究
胡 媛1,刘 卫2,周 悦1,王一津1,俞子恒1
(1.上海海洋大学 工程学院,上海 201306;2.上海海事大学 商船学院,上海 201306)
建立基于GNSS信号的海面测高数学模型,揭示基于载波和信噪比观测量测高方法的内在联系;提出利用造价便宜的GPS接收机以及普通接收机天线进行海平面高度变化监测的手段;进行海平面高度变化监测的实验并与验潮仪对比分析。结果表明:利用普通GPS接收机和天线进行海平面测高可以获得厘米级的测量精度,24 h连续监测的均方根误差为4.13 cm,GPS高度计与验潮仪的测量结果相关系数为0.86;所布设的GNSS高度计与造价昂贵的大地测量型接收机监测结果相当,该造价便宜的高度计更适合用于未来大规模实际的海平面高度变化监测中。
GPS;信噪比;海平面高度;卫星导航
1 引言
随着全球气候变暖,海面平均高度的升高已经逐渐影响着各个沿海国家的经济和社会发展情况;对海平面高度变化的长期和准确的监测具有很重要的现实意义[1-2]。传统的海平面高度监测依靠布置在沿海各个站点的验潮仪进行观测和记录海面变化情况。验潮仪只监测海平面高度对于基准点的相对变化。即使很精确的验潮仪,其监测结果不仅受海平面高度变化的影响,同时也受地壳运动的影响。地壳运动和变形等的影响使得传统的验潮仪很难实现对海平面高度变化的直接测量[3-4]。
随着GPS(Global Positioning System)、GLONASS(Global Navigation Satellite System)、北斗(Bei Dou Navigation Satellite System,BDS)以及Galileo等全球卫星导航系统(Global Navigation Satellite System,GNSS)的迅速发展,利用GNSS反射信号进行海平面高度变化的监测已经成为可能[5-8]。1993年,Martin-Neira[9]首次提出利用GPS散射信号进行海平面高度测量的可能性。研究人员陆续开展了利用GPS反射信号进行海平面高度测量的研究,主要包括:(1)利用GPS的载波观测量进行海平面高度测量的研究[10-11];基于载波观测量的测量需要布设两个接收机天线,一个天线接收直射信号,另外一个天线接收来自于海面的反射信号。该方法精度相对较高,但是安装麻烦、费用较高,随着海面风速增高,测量精度严重下降;(2)利用大地测量型接收机所接收到的信号信噪比(SNR)进行海平面高度的测量研究[12-13];这些研究所用的大地测量型接收机价格昂贵,接收机采用扼流圈天线并配置球形保护罩以提高天线增益高,很难进行大规模的海平面高度监测实际应用。另外,利用载波观测量和信噪比SNR的两种海面测高方法的内在联系及测量机理也有待进一步研究。
本文研究利用GNSS观测量进行海平面高度监测的方法;以GPS系统为例,建立基于载波观测量和信噪比SNR的海面测高数学模型,研究两种方法内在联系和统一性问题;针对传统监测方案造价高、安装复杂,很难进行大规模应用的实际,本文构建了利用造价便宜的GPS接收机以及普通接收机天线进行海平面高度变化监测的手段,并进行实验分析研究,可为未来海洋监测设备的更新换代和大规模实际应用提供技术参考。
2 GNSS海面测高方法
2.1 GNSS反射信号测高原理
传统的GNSS接收机只是利用所直接接收到的导航信号进行定位和导航。GNSS导航信号属于电磁波信号,其经过地面的反射会被天线接收而降低导航定位精度,这种现象称为多路径干扰[14-15]。而基于GNSS反射信号进行地面参数的测量正是利用导航信号的多路径干扰效应,海平面高度变化的监测原理正是利用经过地面的反射的信号进行测量。假设接收机接收到第s颗卫星的信号,同时第s颗卫星的信号经过海面的反射也被天线接收到(见图1)。信号在海面的反射点为O点;接收机天线距离海平面高度为h;信号的反射角为;反射信号与直接信号相比,额外的传输路径为ρ,如图中粗实线表示。
根据GNSS信号的传输原理,接收机天线接收到第s颗卫星的合成信号(包括直接信号和反射信号)为[16]:

式中:

As和ϕs分别为接收机接收到的合成信号的幅度和相位角;D为信号的导航电文信息;Cs(·)为信号的伪随机码;Tc为伪随机码的周期;和分别为所接收到的直射信号和反射信号的幅值;ϕsd为直射信号的载波相位,为反射信号的载波相位;ω(n)为方差为1的高斯白噪声。
2.2 SNR观测量测高模型
假设接收到的信号噪声为高斯白噪声,As为正则化的幅值,因此As直接提供了信噪比的观测量,即:

图1 GNSS海面测高示意图

式(5)为基于GNSS信号信噪比SNR的海平面高度测量的基本数学关系式,利用接收机的SNR观测值输出时间序列就可以进行海平面高度的测量。可以看出,SNR的主要组成部分为直接信号的幅值,反射信号对SNR的影响主要是产生高频的小幅度的变化,一般而言,这种小幅度的振荡是在比较小的卫星仰角情况下产生的,因此在海面测高时仰角通常选用30°以下。
根据图1的GNSS测高几何关系,可以得到反射信号超过直接信号的额外传输距离ρ与接收机天线距离海平面高度h和信号反射角的关系为:

式(6)为利用载波观测量进行海面测高的基本数学关系式[17-18],通过获得反射信号超过直接信号的额外传输距离和卫星的高度角,可以获得接收机天线距离海平面高度h。
根据光速c、信号频率 f0以及反射信号的载波相位的关系,式(6)可以变换为:

根据式(5)和式(7),无论是利用信噪比SNR或载波观测量的海面测高方法,都是基于反射信号的载波相位进行测量的。基于载波观测量的方法直接选用载波相位作为观测量,测高接收机的输出数据为载波相位,而基于信噪比SNR的方法在载波相位基础上选用SNR作为观测量,测高所利用的是接收机的SNR输出时间序列。两种方法的测量基础是统一的,而且利用信噪比SNR的测量方法不需要改造传统的接收机内部结构和安装接收反射信号的天线,可以直接利用普通接收机的SNR输出量就可以进行海平面高度的监测。
3 测高实验与分析
3.1 实验过程

图2 GPS海平面测高实验区域

图3 GPS海平面测高接收机
实验场地为沿海区域,海面风速基本都在2 m/s以上,接收机所面向的海域无地形遮挡区域的方位角范围为70°~210°(见图2)。测站配置了佳瓦特普通GPS接收机(见图3,GORS为接收机所在位置),接收机安装在水泥墩上。与传统配置有球形保护罩的扼流圈天线大地测量型接收机不同,本实验中的接收机天线为普通型GPS接收机天线,由GPS接收机和采集数据装置构成了GPS高度计。实验时间为2015年7月1日00:00:00(世界时,下同)至7月2日00:00:00,连续记录24 h的GPS L1信号的SNR观测值,数据记录时间间隔为1 s。实验中接收机天线相位中心距离海平面高度大约3 m左右;为了实现连续有效的测量,卫星高度角设置为5°~30°。另外实验还专门安装了验潮仪记录海面变化情况,安装位置离所配置的接收机大约为1 km左右,验潮仪的测量结果可以与GPS所获得结果进行对比。
实验方案及流程见图4,首先需要安装实验设备并进行数据采集,接收机所采集的数据为Rinex观测值文件,同时利用GNSS星历数据将o文件转换为信噪比SNR数据,这些信噪比SNR时间序列按照不同卫星和接收时间进行排列。
3.2 SNR测高结果及分析
选择不同卫星的时间序列将直接信号分量滤除,正如式(5)所描述,滤除的结果为包含相位信息的反射信号分量;将所滤除的信号按照卫星高度角进行序列重构,卫星高度角的范围限制为5°~30°。图5以码段编号为PRN 5和PRN16的两颗GPS卫星为例,表示SNR序列在滤除直接信号后的SNR分量随卫星仰角变化情况。

图4 GNSS海面测高流程
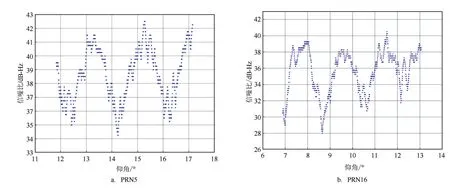
图5 不同码段GPS卫星信噪比SNR随仰角变化情况

图6 不同码段编号的GPS卫星的LSP频谱分布情况
根据滤除直接信号分量所获得的信噪比重构序列,进行Lomb Scargle Periodograms(LSP)谱变换可以反演得到海平面高度,并利用下列准则进行有效测高的判断:(1)LSP频谱的最大幅度高于20 V(1 s的采样数据);(2)LSP频谱的最大幅度高于2倍平均背景噪声;(3)LSP频谱的至少有10个以上的峰值;(4)LPS频谱的最大幅度高于第二峰值幅度的2倍;若LSP谱变换不满足以上条件,将根据图2的流程重新进行信噪比序列的选择。
图6分别表示码段编号为PRN 5和PRN16两颗GPS卫星进行LSP频谱变换后反演的接收机天线距离海平面高度h的情况;图中红色直线表示平均背景噪声,蓝色曲线表示LSP频谱;其中,码段编号为PRN的5卫星所获取得到的接收机天线距离海平面高度h为2.922 8 m,平均背景噪声为3.733 9 V,码段编号为PRN 16的卫星所获取得到的接收机天线距离海平面高度h为3.034 7 m,平均背景噪声为3.629 4 V,需要指出的是根据这两颗卫星SNR序列所得到接收机天线距离海平面高度是在不同时刻的结果。

图7 验潮仪与GPS高度计海平面高度变化对比情况
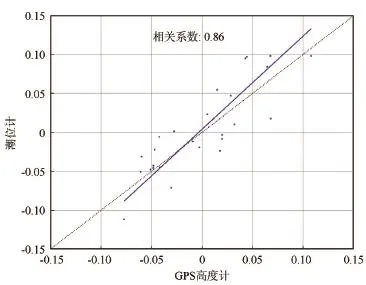
图8 验潮仪与GPS高度计测量结果的相关情况
根据不同卫星在24 h内的不同时间段所反演的接收机天线距离海平面高度情况,将高度变化与验潮仪所测量的结果进行对比(见图7)。其中,图中的红色星号为GPS高度计所获取的海平面高度变化情况,黑色曲线为验潮仪获取的海平面高度变化情况。图8表示验潮仪和GPS高度计测量结果的相关情况。需要说明的是:由于GPS所测量的海平面高度是接收机天线相位中心到海平面的高度,验潮仪所测量的是海平面高度对于所设定基准点的相对变化,两者参考基准点不同,因此在GPS高度计测量结果与验潮仪比较时,将GPS高度计和验潮仪所测得的海平面高度减去各自的平均值后所得到的序列作为各自的海平面高度变化。
所进行的24 h实验所获得的GPS高度计海平面高度变化与验潮仪所测得海平面高度变化的均方根误差RMS为0.0413 m,即4.13 cm,GPS高度计与验潮仪的测量结果相关系数为0.86。所获得的结果与Larson等人[1]在2011年利用GPS大地测量型接收机并装备高增益的带球形保护罩的扼流圈天线进行海平面高度测量结果相当。实验结果表明利用普通的接收机和天线进行海平面高度的测量也能获得厘米级的精度。由于普通接收机和天线价格相对与大地测量型接收机便宜,未来可适合大规模应用于实际海面监测和海浪预报中。
4 结论与展望
本文建立了基于GNSS信号的海面测高数学模型,揭示了基于载波和信噪比观测量测高方法的内在联系;以GPS系统为例,提出了利用造价便宜的GPS接收机以及普通接收机天线进行海平面高度变化监测的手段;进行海平面高度变化监测的实验并与验潮仪对比分析,得到的结论如下:(1)利用普通GPS接收机和天线进行海平面高度的测量可以获得厘米级的精度,24 h的均方根误差为4.13 cm,GPS高度计与验潮仪的测量结果相关系数为0.86;(2)所布设的GPS高度计与带球形保护罩的扼流圈天线的大地测量型接收机测量结果相当,这表明该所构建的GPS高度计可以用于未来大规模实际海面监测和海浪预报中。
下一步将继续进行GPS高度计的长时间观测及分析,搭建基于北斗系统的海平面测高系统,实现测试站点自动化观测预报功能,为未来大规模的沿海测高应用提供技术参考。
致谢:感谢德国地球科学中心Jens Wickert教授和上海海事大学刘卫副教授在数据分析方面的讨论。
[1]Anderson K.A GPS tide gauge[J].GPS World Showcase,1995,6: 44.
[2]Cohen J,Small C,Mellinger A,et al.Estimates of coastal populations[J].Science,1997,278(5341):1209-1213.
[3]Stammer D,Ray R D,Andersen O B,et al.Accuracy assessment of global barotropic ocean tide models[J].Reviews of Geophysics, 2014,52(3):243-282.
[4]Larson K M,Löfgren J,Haas R.Coastal sea level measurements using a single geodetic GPS receiver[J].Advances in Space Research,2013,51(8):1301-1310.
[5]Zavorotny V U,Voronovich A G.Scattering of GPS signals from the ocean with wind remote sensing application[J].IEEE Transactions on Geoscience and Remote Sensing,2000,38(2):951-964.
[6]Park H,Valencia E,Camps A,et al.Delay tracking in spaceborne GNSS-R ocean altimetry[J].IEEE Geoscience and Remote Sensing Letters,2013,10(1):57-61.
[7]You H Z,Garrison J L,Heckler G,et al.The autocorrelation of waveforms generated from ocean scattered GPS signals[J].IEEE Geoscience and Remote Sensing Letters,2006,3(1):78-82.
[8]Ablain M,Cazenave A,Valladeau G,et al.A new assessment of the error budget of global mean sea level rate estimated by satellite altimetry over 1993-2008[J].Ocean Science,2009,5(2):193-201.
[9]Martin-Neira M.A pasive reflectometry and interferometry system (PARIS)application to ocean altimetry[J].ESA Journal,1993,17: 331-355.
[10]Martin-Neira M,Caparrini M,Font-Rossello J,et al.The PARIS concept:an experimental demonstration of sea surface altimetry using GPS reflected signals[J].IEEE Transactions on Geoscience and Remote Sensing,2001,39(1):142-150.
[11]Ruffini G,Soulat S,Caparrini M,et al.The Eddy Experiment: accurate GNSS-R ocean altimetry from low altitude aircraft[J]. Geophysical Research Letters,2004,31(12):L12306.
[12]Roussel N,Ramillien G,Frappart F,et al.Sea level monitoring and sea state estimate using a single geodetic receiver[J].Remote Sensing of Environment,2015,171:261-277.
[13]Roussel N,Ramillien G,Frappart F,et al.Enhancement in interference pattern technique foraltimetry and tide/wave measurements:Offshore 60-meter lighthouse case study[C]// Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium(IGARSS).Milan,Italy:IEEE, 2015:3894-3897.
[14]Bishop G J,Klobuchar J A,Doherty P H.Multipath effects on the determination of absolute ionospheric time delay from GPS signals[J].Radio Science,1985,20(3):388-396.
[15]Georgiadou P Y,Kleusberg A.On carrier signal multipath effects in relative gps positioning[J].Map Collector,1988,13(3):172-179.
[16]Gleason S,Gebre-Egziabher D.GNSS Applications and Methods [M].Boston:Artech House,2009.
[17]Carreno-Luengo H,Camps A,Ramos-Pérez I,et al.Experimental evaluation of GNSS-reflectometry altimetric precision using the p (y)and c/a signals[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2014,7(5):1493-1500.
[18]Rius A,Noqués-Correig O,Ribó S,et al.Altimetry with GNSS-R interferometry:firstproofofconceptexperiment[J].GPS Solutions,2012,16(2):231-241.
Study on sea level changes based on the observations of GPS signal to noise ratio
HU Yuan1,LIU Wei2,ZHOU Yue1,WANG Yi-jin1,YU Zi-heng1
(1.College of Engineering Science and Technology,Shanghai Ocean University,Shanghai 201306 China;2.Merchant Marine College,Shanghai Maritime University,Shanghai 201306 China)
The mathematical model of sea level altimetry based on GNSS signal carrier observables and the SNR is established,and the relation of two methods is studied in this paper.The scheme of sea level changes monitoring using inexpensive GPS receiver and off-shelf antenna is designed.Sea level monitoring experiment is conducted and the results of GPS measurement are compared with tide gauge data.The results show that centimeter accuracy of sea level changes can be archived using ordinary GPS receiver and antenna.The results of the 24 hours experiment show that the RMS error is 4.13 cm.The correlation coefficient of GPS altimeter and tide gauge measurements is 0.86.The GPS altimeter can obtain similar accuracy compared with the results of geodetic receiver equipped with a GPS antenna with a choke spherical equivalent protective cover.This indicates that the GPS altimeter can be used for future actual sea level forecasting.
GPS;signal to noise ratio;sea water level;satellite navigation
P228.4;P731.23
A
1003-0239(2017)03-0026-06
10.11737/j.issn.1003-0239.2017.03.004
2016-08-19;
2016-10-18。
国家自然科学基金(41506112,61304230);上海教委科研创新项目(14YZ106,14YZ121);上海海洋大学海燕计划(A2_0209_ 14_200063)。
胡媛(1981-),女,讲师,博士,主要从事卫星导航技术、GNSS-R技术以及海洋监测等研究。E-mail:y-hu@shou.edu.cn
猜你喜欢
海洋通报(2021年3期)2021-08-14
海洋通报(2021年3期)2021-08-14
江苏安全生产(2020年8期)2020-10-27
海洋学报(2020年3期)2020-05-22
成都信息工程大学学报(2019年6期)2019-08-13
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
学苑创造·A版(2017年5期)2017-05-09
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
