
基于神经网络的非线性气动弹性系统辨识
2017-07-10 10:27:26窦立谦
计算机应用与软件 2017年6期
窦立谦 冀 然
(天津大学电气与自动化工程学院 天津 300072)
基于神经网络的非线性气动弹性系统辨识
窦立谦 冀 然
(天津大学电气与自动化工程学院 天津 300072)
由于气动弹性系统的非线性和不确定性的存在,传统的辨识方法在工程中难以满足。针对这种情况提出了一种模糊小波神经网络(FWNN)辨识方法。首先,采用区间2型模糊逻辑系统和小波神经网络结合构建FWNN网络结构,能够较好地逼近具有不确定性的非线性AE系统;然后,考虑到辨识的快速性和准确性,系统采用一组模糊IF-THEN规则,对模糊后件采用单隐层小波神经网络结构;参数学习采用基于Lyapunov稳定性的滑模学习算法,保证系统存在参数不确定的情况下,辨识误差能更快地收敛。最后,对结构非线性二元翼段进行仿真研究,验证了该模型的有效性。
系统辨识 非线性气动弹性系统 模糊小波神经网络 滑模算法
0 引 言
现在飞行器设计日益追求高速度、高机动性,使得飞行器越来越呈现出轻结构、大柔性和高机动性的特点,相应的气动弹性问题也越来越突出[1]。气动弹性具有明显的非线性特征,如材料非线性、几何非线性、间隙非线性等,这些非线性因素不仅影响系统的系统稳定性,还可能导致颤振问题,危害飞行的安全性。因此,近些年对非线性气动弹性特性的研究成为国内外研究的热点问题。以二元翼这种典型的结构非线性气动弹性系统为例,许多学者在动力学分析、辨识和控制方面做了大量的研究[2-3]。Dario H. Baldelli[4]基于Hammerstein对带后缘控制面的二元翼系统俯仰方向由刚度引起的非线性部分进行辨识。其中只有俯仰方向的刚度系数是非线性的形式。假设其他线性部分均已知,采用非迭代的算法估计相关参数。南京航空航天大学的韩景龙[5-6]辨识了具有间隙结构的气动弹性系统。利用间隙开关点将间隙非线性系统区分为3个线性子系统,用Hammerstein模型表示其非线性部分,构造了开关点的迭代序列;并采用非迭代和迭代相结合的方法进行求解,从而成功获得包含间隙开关点在内的该系统所有模型参数。
在真实环境中,气动弹性系统除自身的刚度非线性外,还会受到各种不确定因素的影响。不确定性来源通常包括非定常气动力,结构的刚度、阻尼以及传感器和作动器等控制系统。对于含有不确定性的非线性系统的辨识,传统的辨识方法,如Hammerstein方法,已不能满足要求。目前,研究的趋势之一是将小波分析、模糊逻辑和神经网路等结合产生融合的非线性系统辨识方法[7]。李忠辉等[8]提出了基于函数连接型神经网络的Hammerstein模型辨识。它不包含隐层,仅通过一系列线性独立方程将输入向量拓展到高维空间,并以此来增强网络的非线性映射能力。Abiyev等[9]提出了一种2型模糊小波神经网络结构,模糊前件部分为二型模糊集,模糊后件为小波函数,参数学习采用梯度算法。这种方法的辨识精度比较高,但是梯度下降法更新参数使收敛速度变慢,学习算法有待改进。Soheil Ganjefar等[10]以TSK模糊模型为基础,提出了单隐层模糊递归小波神经网络(SLFRWNN)的结构,该结构最大的特点是改进了模糊后件,即每个输入信号仅对应一个带递归的神经元,使得辨识具有更好的灵活性和快速性。
本文针对只有后缘控制面的非线性二元翼段,考虑刚度项和阻尼项的非线性和刚度项参数的不确定性,提出了一种模糊小波神经网络的结构,并且采用基于Lyapunov稳定理论的滑模算法得出参数的自适应律,辨识结果与SLFRWNN辨识[10]和径向基神经网络(RBFNN)辨识[11]的结果对比,有明显的优势。
1 二元翼的运动微分方程
非线性二元翼段如图1所示,系统具有2个自由度,机翼沉浮位移和绕弹性轴的俯仰角。结构的非线性包括有刚度项、阻尼项,刚度参数具有不确定性。模型的结构参数由表1列出。
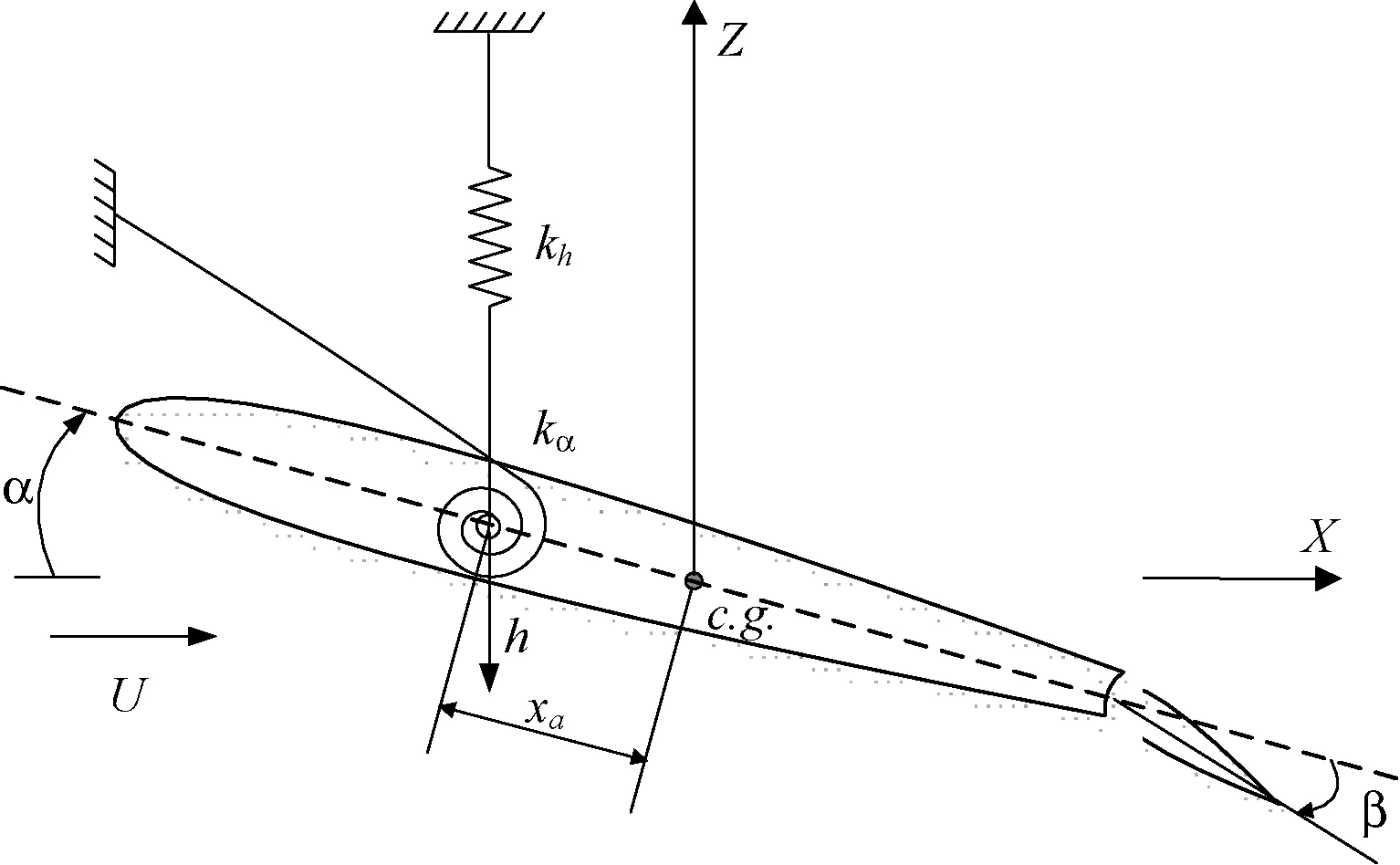
图1 非线性气动弹性系统
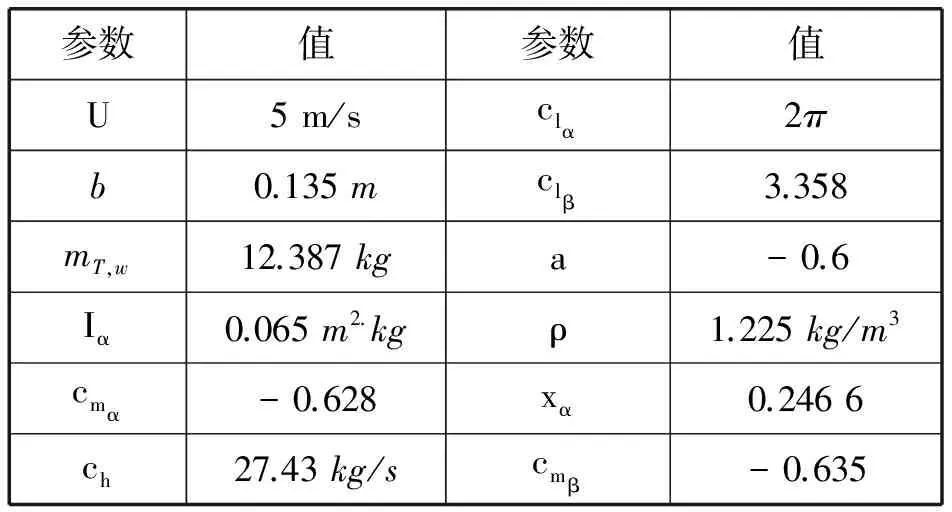
表1 AE系统参数
二元翼的运动方程为:

(1)

(2)
其中,U为自由来流速度,ρ为空气密度,clα和cmα分别为俯仰角α的升力和力矩系数,clβ和cmβ分别为副翼β的升力系数和力矩系数。
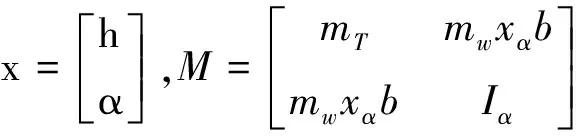
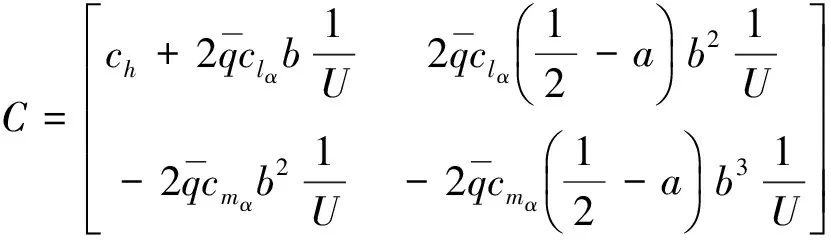
将式(2)代入式(1),并写成状态空间的形式:

(3)

(4)

(5)


(6)
(7)

2 模糊小波神经网络结构
对于复杂的非线性系统辨识来说,趋势之一是将小波分析、模糊逻辑和神经网络结合产生融合的非线性系统辨识方法。本文采用模糊小波神经网络结构进行辨识,首先将TSK模糊模型与前馈神经网络相融合构造模糊神经网络,进一步将小波变换与模糊神经网络结合,构造出模糊小波神经网络模型。此外,考虑到辨识的快速性和准确性对于每个模糊后件,网络设计成单隐层的结构。本文采用4个模糊IF-THEN规则:

(8)
模糊小波神经网络结构分为5层,如图2所示。
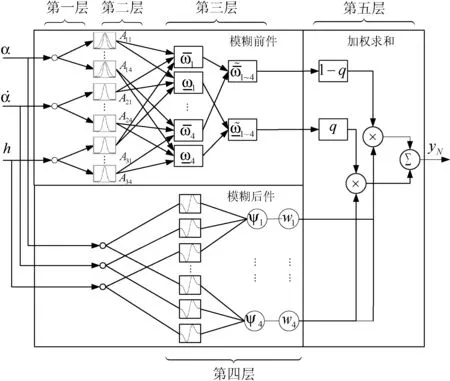
图2 模糊小波神经网络结构图

(9)
(10)
(11)
(12)
第三层是由第二层得到的结果计算每个规则的激活强度,由激活集合的隶属度函数取t-范数得到,由于α的隶属度函数为区间型,所得的对规则的激活强度也是区间型。
(13)
(14)
N为模糊规则总数4。计算出每个规则的激活强度后,第四层应用小波分析得到每个规则对应的模糊后件。小波分析将信号分解成一系列小波函数的叠加,而这些小波函数都是由小波母函数经过平移与尺度伸缩得来的,如图3所示。用这种不规则的小波函数可以逼近那些非稳态信号中尖锐变化的部分,也可以去逼近离散不连续具有局部特性的信号,从而更为真实地反映原信号在某一时间尺度上的变化。本文选择高斯函数的一阶导数作为小波母函数,由式(15)表示。dir、tir分别是对应第i个输入,第r个规则的小波伸缩和平移系数。
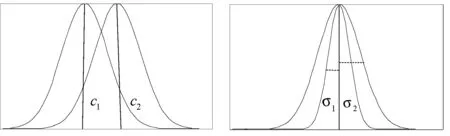
图3 小波母函数的伸缩与平移
(15)
wr为模糊后件的权值,输出为vr,如式(16)所示。
(16)
(17)
网络搭建完成以后,对参数进行训练,这些参数有第二层高斯激活函数的中心cir和宽度σir,第四层小波的伸缩系数dir和平移系数tir,模糊后件的权值wr和第五层下隶属度函数的权值q。
3 滑模学习算法
网络参数的训练方法有很多,对于复杂的非线性情况,可考虑用一些智能优化算法,例如遗传算法和蚁群算法。但是智能优化算法大多编程实现比较复杂,且容易受参数等的影响。本文研究的二元翼段,俯仰角α存在不确定性,且存在外部环境的扰动,针对这种情况,本文采用滑模算法。它的优点是算法简单,能够克服系统的不确定性,对干扰具有很强的鲁棒性,从而保证辨识误差更快地收敛。由上文知,N(t)为真实信号,yN(t)为估计信号,e(t)为辨识误差。首先定义滑模面:
s(e(t))=yN(t)-N(t)=e(t)
(18)
构造如下基于滑模的参数自适应律:
(19)
(20)
(21)
(22)
(23)
(24)
(25)
(26)

(27)
η1*、η2*为学习效率理想值,定义学习效率参数误差:
(28)
(29)
(30)

4 实验结果
(31)
kh(h)=2 844.4+0.01h2
(32)
(33)

图4 非线性二元翼段仿真示意图
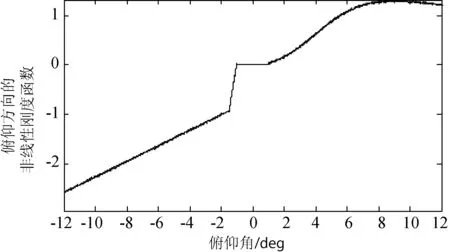
图5 俯仰方向的非线性函数

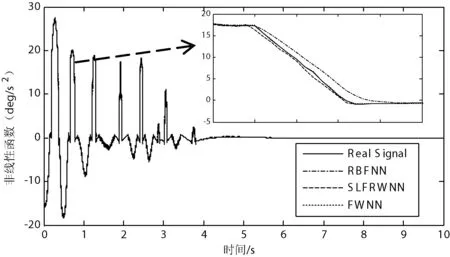
图6 三种方法的辨识结果
实际工程中,为了确定模型动态特性的置信度,采用均方根误差检验法来评估辨识方法的可信性,如式(34)所示:
(34)
经计算,当不确定性分布参数均值为0.03,标准差为0.01的情况下,RBFNN辨识方法均方根误差为0.294 4,SLFRWNN方法均方根误差为0.220 8,本文提出的方法FWNN均方根误差为0.183 9,比前两种方法较小,说明仿真值同真值之间的偏差较小。图7给出了随时间的推移,三种方法的均方根误差递增图。在整个计算机仿真过程中,FWNN方法的均方根误差最小,辨识结果更加精确。
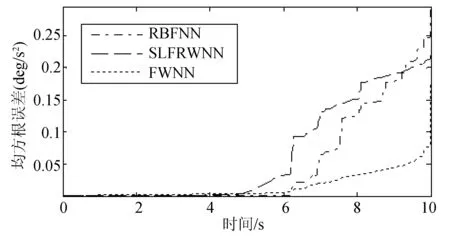
图7 三种方法的均方根误差
根据式η2*≥λ,模糊后件理想的学习效率不得小于λ。由图8可知,学习效率随时间一直在增大,4s后逐渐平稳,趋于理想的学习效率。参数q表示下隶属度的权值,相应的,1-q表示上隶属度的权值,由图9知,在4s后,q的学习效率没有变化,趋紧于90,同时,参数q的值停留在0.42附近。
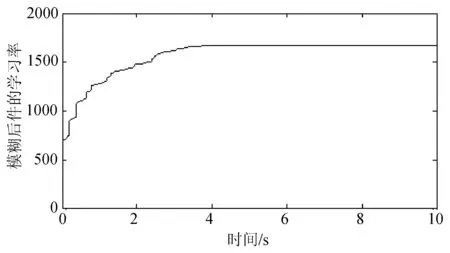
图8 模糊后件的学习效率
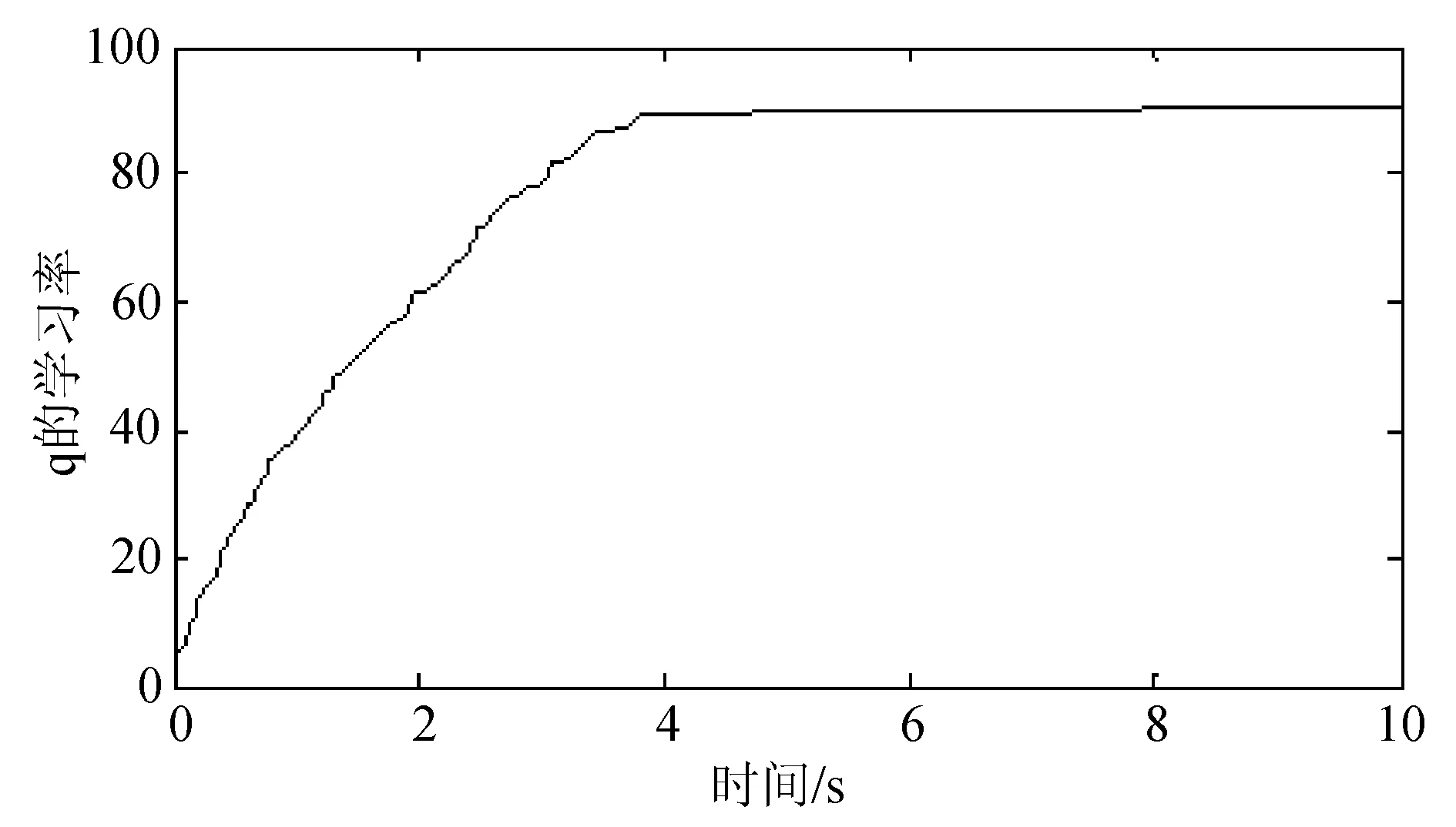
图9 参数q的学习效率
5 结 语
在真实环境中,气动弹性系统除自身的非线性外,还受到各种不确定因素的影响,需要根据丰富的经验和知识加以确定。本文考虑到这种实际情况,采用基于神经网络的方法对具有刚度、阻尼非线性和不确定性的二元翼段进行辨识,成功获得了系统模型,减少了工程试验所需的人力和物力资源。
本文采用的滑模算法编程简单,易于实现,响应速度快,其次,对外界噪声干扰和参数摄动具有鲁棒性,从而保证辨识误差更快地收敛。
本文提出的模糊小波神经网络能够有效地辨识非线性气动弹性系统,并且达到了很高的精度,可以进一步应用到其他具有不确定性的复杂非线性系统的辨识与控制中,具有广泛的适用性。
[1] 李栋梁. 气动弹性系统的时滞反馈控制[D].南京: 南京航空航天大学, 2008.
[2]PradlwarterHJ,PellissettiMF.Realisticandefficientreliabilityestimationforaerospacestructures[J].ComputerMethodsinAppliedMechanicsandEngineering, 2005,194(12-16):1597-1617.
[3]BhoirN,SinghSN.Outputfeedbacknonlinearcontrolofanaeroelasticsystemwithunsteadyaerodynamics[J].AerospaceScience&Technology, 2004,8(3):195-205.
[4]BaldelliDH,BrennerM.NovelnonlinearHammersteinmodelidentification:applicationtononlinearaeroelasticoraeroservoelasticsystem[J].JournalofGuidanceControl&Dynamics,2008,31(31):1677-1686.
[5] 韩景龙, 李治涛. 间隙非线性气动弹性系统的辨识[J]. 航空学报,2012,33(11):2002-2009.
[6] 韩景龙, 李治涛. 基于Hammerstein模型的非线性气动弹性系统辨识[J].南京航空航天大学学报,2013,45(1):14-20.
[7] 邵俊倩. 模糊小波神经网络在控制系统应用中的研究[D].黑龙江:黑龙江大学,2009.
[8] 李忠辉. 基于人工神经网络的Hammerstein模型辨识及应用[D].秦皇岛:燕山大学,2014.
[9]AbiyevRH,KaynakO.Atype-2fuzzywaveletneuralnetworkforsystemidentifycationandcontrol[J].JournaloftheFranklinInstitute,2013,350:1658-1685.
[10]GanjefarS,TofighiM.Single-hidden-layerfuzzyrecurrentwaveletneuralnetwork:Applicationstofunctionapproximationandsystemidentification[J].InformationSciences,2015,294:269-285.
[11]ZhangMG,WangXG.AdaptivePIDcontrolbasedonRBFneuralnetworkidentification[C]//Proceedingsofthe17thIEEEInternationalConferenceonToolswithArtificialIntelligence,2005.
IDENTIFICATION OF NONLINEAR AEROELASTIC SYSTEMS BASED ON NEURAL NETWORK
Dou Liqian Ji Ran
(CollegeofElectricalandAutomationEngineering,TianjinUniversity,Tianjin300072,China)
Because of the nonlinearity and uncertainty of the aeroelastic system, the traditional identification method is difficult to meet in engineering. In this paper, a fuzzy wavelet neural network (FWNN) identification method is proposed. Firstly, the FWNN network is constructed by the combination of interval 2 fuzzy logic system and wavelet neural network, which can approach the nonlinear AE system with uncertainties. Then, considering the fastness and accuracy of identification, the system adopts a set of fuzzy IF-THEN rules, and a single hidden layer wavelet neural network structure is used for the fuzzy consequent parts. Parameter learning is based on the Lyapunov stability of the sliding mode learning algorithm to ensure the existence of the parameters of the system uncertainty, the identification error can be faster convergence. Finally, the simulation of the nonlinear binary wing section is carried out to verify the effectiveness of the model.
System identification Nonlinear aeroelastic system Fuzzy wavelet neural network Sliding mode algorithm
2016-04-27。国家自然科学基金项目(91016018,61074064)。窦立谦,副教授,主研领域:非线性系统建模与分析。冀然,硕士生。
TP183
A
10.3969/j.issn.1000-386x.2017.06.043
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21 00:44:56
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
自动化学报(2017年2期)2017-04-04 05:14:28
中学生数理化·七年级数学人教版(2016年2期)2016-05-30 21:20:57
西北工业大学学报(2015年4期)2016-01-19 03:31:37
航空学报(2015年4期)2015-05-07 06:43:37
航空学报(2015年4期)2015-05-07 06:43:25
振动工程学报(2015年1期)2015-03-01 01:15:46
