
基于特征加权的快速压缩感知跟踪
2017-07-10 10:27:26赵端谢琦
计算机应用与软件 2017年6期
赵 端 谢 琦
(郑州大学信息工程学院 河南 郑州 450001)
基于特征加权的快速压缩感知跟踪
赵 端 谢 琦
(郑州大学信息工程学院 河南 郑州 450001)
基于压缩感知的目标跟踪算法具有简单、实时、高效的特点。快速压缩感知目标跟踪算法FCT(Fast Compressive Tracking)生成目标高维特征未考虑不同尺度滤波器生成特征的有效性,目标与候选样本之间的相似性度量仅考虑简单叠加,在目标受到光照、遮挡等外界因素的影响下易使跟踪结果出现偏差。针对这些问题,提出一种基于特征加权的快速压缩感知跟踪算法。该算法根据滤波器尺度,自适应地分配权值,生成目标高维特征。算法将候选样本各维压缩特征分类为目标压缩特征的可能性与贝叶斯分类器输出相乘,作为目标与候选样本之间的相似性度量。实验结果表明,提出的方法在目标受到光照、遮挡等外界因素的影响下具有更强的鲁棒性。
目标跟踪 压缩感知 实时 特征加权
0 引 言
视觉目标跟踪是机器视觉领域研究的热点问题,已经被广泛应用于众多领域,如:机器人、智能视频监控、军用导航等,有着极高的研究价值和广阔的应用发展前景[1]。
传统的视觉目标跟踪算法大致包含三个部分:一个外观模型,一个运动模型和一个相似性度量策略。近些年来,视觉目标跟踪算法得到众多的关注和研究。例如,文献[2]提出一种新颖的跟踪框架(TLD),即将跟踪任务分解为跟踪、学习和检测,该算法结合检测和跟踪方法,建立新的在线学习机制,从而使得跟踪结果更加准确。文献[3]利用稠密的时空上下文来进行跟踪,具有简单、快速及鲁棒的优点。算法在贝叶斯框架下,通过目标位置在上一帧的先验信息来计算置信图,有效地减轻了目标位置的模糊。此外,还有CSK[4]、LSS[5]等算法。虽然目标跟踪已经得到广泛的关注和研究,但目标外观易因目标受到光照[6]、遮挡[7-8]等外界因素的影响时发生变化,目标跟踪仍然是一个具有挑战性的问题。
压缩感知理论[9-10]用投影矩阵得到信号的压缩测量值,然后通过重构算法重构出原始信号,因其具有简单、高效等优点,在跟踪领域得到广泛的使用。文献[11]提出一种基于压缩感知理论的目标跟踪算法,该算法证明了利用压缩感知技术获得的低维压缩信号基本保留原有信号的全部特性,进而在不降低计算精度的前提下大大提高运算效率。文献[12]提出一种简单高效地基于压缩感知的目标跟踪算法(FCT)。该算法利用符合压缩感知RIP条件的随机感知矩阵对多尺度图像特征进行降维,然后采用简单的朴素贝叶斯分类器在降维后的特征上进行分类。该跟踪算法非常简单,并具有较高的准确性。但算法中获取样本的高维特征描述具有一定的盲目性。该算法通过样本与滤波器的卷积获取样本的高维特征,但是没有考虑到随着滤波器尺寸的增大,滤波后产生的有效特征逐渐减少。同时算法中目标与候选样本之间的相似性度量仅考虑简单叠加,处理策略过于简单,当跟踪目标在受到光照、遮挡等外界因素的影响下易使跟踪结果出现偏差。本文针对这些问题提出了改进的特征加权跟踪算法。该算法根据滤波器尺度,自适应给多尺度滤波器滤波得到的特征分配权值,生成目标高维特征。算法将候选样本各维压缩特征分类为目标压缩特征的可能性与贝叶斯分类器输出相乘,作为目标与候选样本之间的相似性度量。实验表明,本文提出的算法能在目标发生遮挡以及光照等变化的情况下准确地跟踪目标。
1 FCT算法
FCT算法最主要的特点就是实时高效,它是一种基于分类的跟踪算法。该算法和大多数分类模型一样,利用压缩特征训练分类器,然后在上一帧目标周围采样,通过分类器对所有候选样本进行分类,得到分类器响应最大值对应的目标区域即为当前帧中跟踪目标的位置。
1.1 压缩感知理论
压缩感知,又称压缩采样、压缩传感,它是信号领域诞生的一个新的采样理论。通过开发信号的稀疏特性,压缩感知可以在远小于Nyquist采样率的条件下,利用随机采样获取信号的离散样本,然后通过非线性重建算法完美的重建信号。所谓压缩感知,最核心的理论在于不降低精度的条件下试图减少对一个信号进行测量的成本。对于文献[12]中提出的FCT算法,最直观的应用即是用压缩感知来提取目标特征,实现高维信号向低维的转变。具体表现形式为:
V=ΦX
(1)
通常,满足受限等距属性(RIP)的矩阵为随机高斯矩阵R∈m×n,其中ri,j~N(0,1)。但是由于随机高斯矩阵是稠密矩阵,当n的取值较大时,内存和计算量仍然很大。因此,在FCT算法中采用了一个非常稀疏的随机投影矩阵Φ ,定义如下:
(2)
其中,当s的取值为1或3时,此矩阵满足RIP属性。在FCT算法中,s=n/algn ,此时随机投影矩阵的精确性几乎接近于传统高斯矩阵。
1.2 压缩特征

图1 样本高维特征描述
矩形滤波器构造如下:
(3)
其中,1≤i≤w,1≤j≤h,w和h分别为目标的宽度和高度。
获取样本的高维特征以后,我们通过上文提及的随机投影矩阵Φ,利用式(1)即可得样本的压缩低维特征。
1.3 分类器的创建与更新
(4)
其中,假定先验概率p(y=1)=p(y=0),且y∈{0,1}是一个二值变量,它分别表示负样本和正样本。由文献[15]可得,高维随机向量的投影几乎总是呈现高斯分布,因此,式(4)中的条件概率p(vi|y=1)和p(vi|y=0)可被假设为符合以下高斯分布。即:

(5)


(6)
1.4 由粗到精的搜索策略
FCT算法采用一种由粗到精的搜索策略来提高算法的速度和性能。在粗跟踪阶段,选取一个较大的搜索半径和搜索步长,依据文献[12]中的算法,确定一个粗糙的跟踪位置。在细跟踪阶段,以粗跟踪阶段获取的目标位置为中心,在一个小的搜索半径内,选取较小的搜索步长进行搜索,得到目标的最终跟踪位置。
2 基于特征加权的压缩跟踪算法
本文在两个方面对快速压缩感知跟踪(FCT)算法进行改进,使得算法在目标受到光照、遮挡等外界因素的影响时具有更强的鲁棒性。
2.1 特征加权
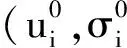
由图1可知,文献[12]通过一组多尺度矩形滤波器{F1,1,…,Fw,h}来得到样本的高维特征描述。对于样本Z∈w×h,通过与滤波器进行卷积处理,可得到(wh)2维的高维特征。但是,由一系列的实验不难得到,随着滤波器尺寸的不断增大,我们获得样本的有效特征越来越少,这对于提高跟踪效果并不明显(如图2所示)。
图2 多尺度滤波结果图像
因此,本文提出了基于特征加权的方法来解决这一问题。文中采用一定的权值分配机制,分别将通过小尺度滤波器获得的有效特征赋予较大权值,同时将较小的权值分配给通过大尺度滤波器获取的特征。具体方法如下:
(7)
(8)
xt=wt×(Fi,j⊗Zw×h)
(9)
X=(x1,x2,…,xwh)T
(10)
其中,i和j为滤波器的宽度和高度,且1≤i≤w,1≤j≤h,w和h为样本Z的宽度和高度,1≤t≤wh,wh为滤波器的个数,X为获得的加权高维特征描述。然后,通过式(1)即可得到样本的压缩低维特征。
与文献[12]获取的高维特征相比,改进的方法通过权值分配机制,提高了滤波获得的有效特征的比重,能够取得更好的跟踪效果。
2.2 相似性度量
由式(4)可得,在FCT算法中目标与候选样本之间的相似性度量仅考虑简单的叠加和,并选取分类器响应最大值对应的区域作为目标区域,但这种方法具有一定的缺陷。由式(4)可得:
(11)
hi(v)=log(p(vi|y=1))-log(p(vi|y=0))
(12)

T=count(hi(v)>0) (i=1,2,…,m)
(13)
P=T/m
(14)
C(v)= P×H(v)=
(15)
其中,T表示hi(v)>0的个数,m为压缩特征的个数。然后,选取C(v)的最大响应值对应的候选区域作为跟踪的目标区域。经实验证明,本文提出的相似性度量方法具有更强的适应性,且可有效地避免样本中个别压缩特征过度拟合引起的跟踪误差。
3 算法流程
本文在对文献[12]中的算法改进的基础上,提出了基于特征加权的压缩跟踪算法,主要算法流程如下所示:
算法流程:
输入:视频序列F。
输出:视频序列F中每一帧的跟踪位置。
1. 初始化参数。
a) 手动选取跟踪目标的位置[x,y,w,h],其中(x,y)为矩形框左上角坐标,w和h分别为矩形框的宽度和高度。在此以It表示t帧时跟踪目标的位置;
b) 选取正负样本集,根据式(10)获取样本高维特征,然后由式(1)获得压缩低维特征后按照式(6)初始化分类器。
2. 粗跟踪。对于第t帧(t≥2),以αc为半径选取正样本集Dc={z|‖I(z)-It-1‖≤αc},由式(10)获取样本高维特征后通过式(1)得到低维压缩特征;

6. 输出跟踪结果,若t不是最后一帧,返回步骤2。
4 实验结果与分析
为了验证本文算法的有效性,在此用4个标准视频进行实验验证,视频数据的详细信息如表1所示。本文算法分别与文献[12]和文献[16]中算法进行了对比。所有算法在Window 7系统下MATLAB R2014a运行,计算机配置是Intel(R) Core(TM) i3-2130 CPU,主频3.40 GHz,4.00 GB内存。
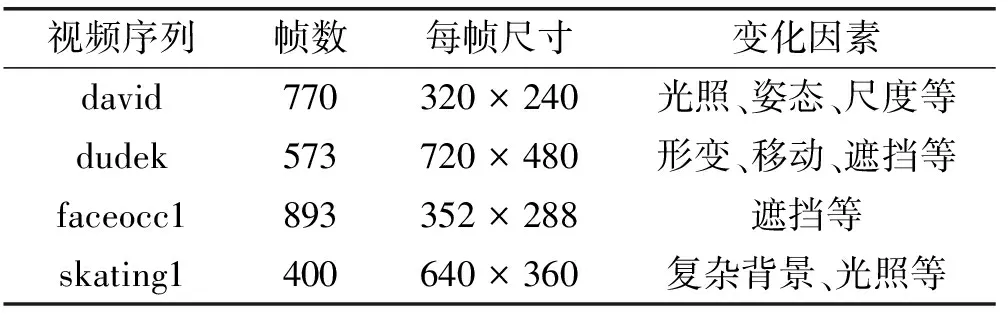
表1 视频详细信息
参数设置如下:手动标记第一帧目标位置,正样本集搜索半径α=4,随机选取45个正样本,负样本集搜索内外半径分别为β=8,γ=30,随机选取50个负样本,粗跟踪阶段的搜索半径为25,搜索步长为4,细跟踪阶段的搜索半径为10,搜索步长为1,压缩低维特征的个数m=100,学习速率λ=0.85。
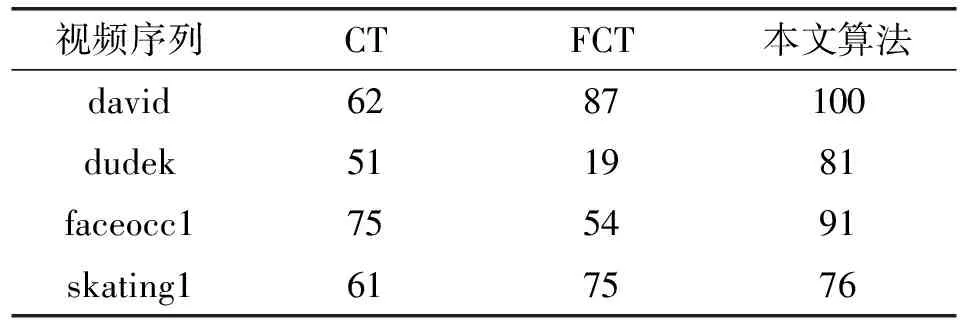
表2 跟踪成功率 %
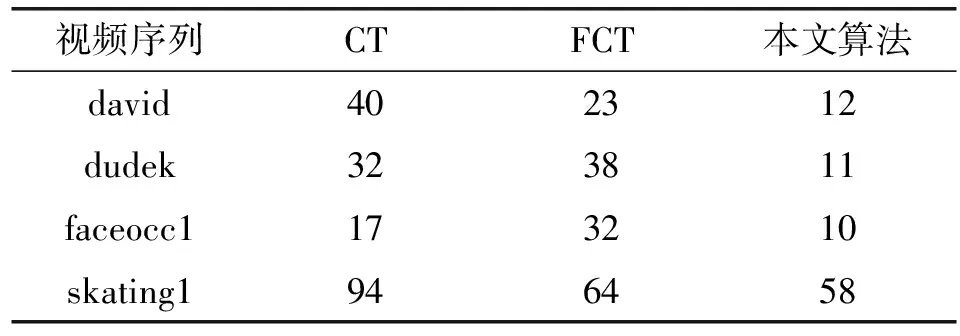
表3 平均中心位置误差 像素
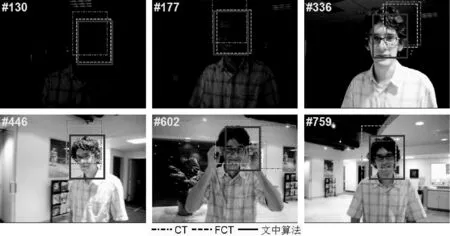
图3 david序列跟踪结果
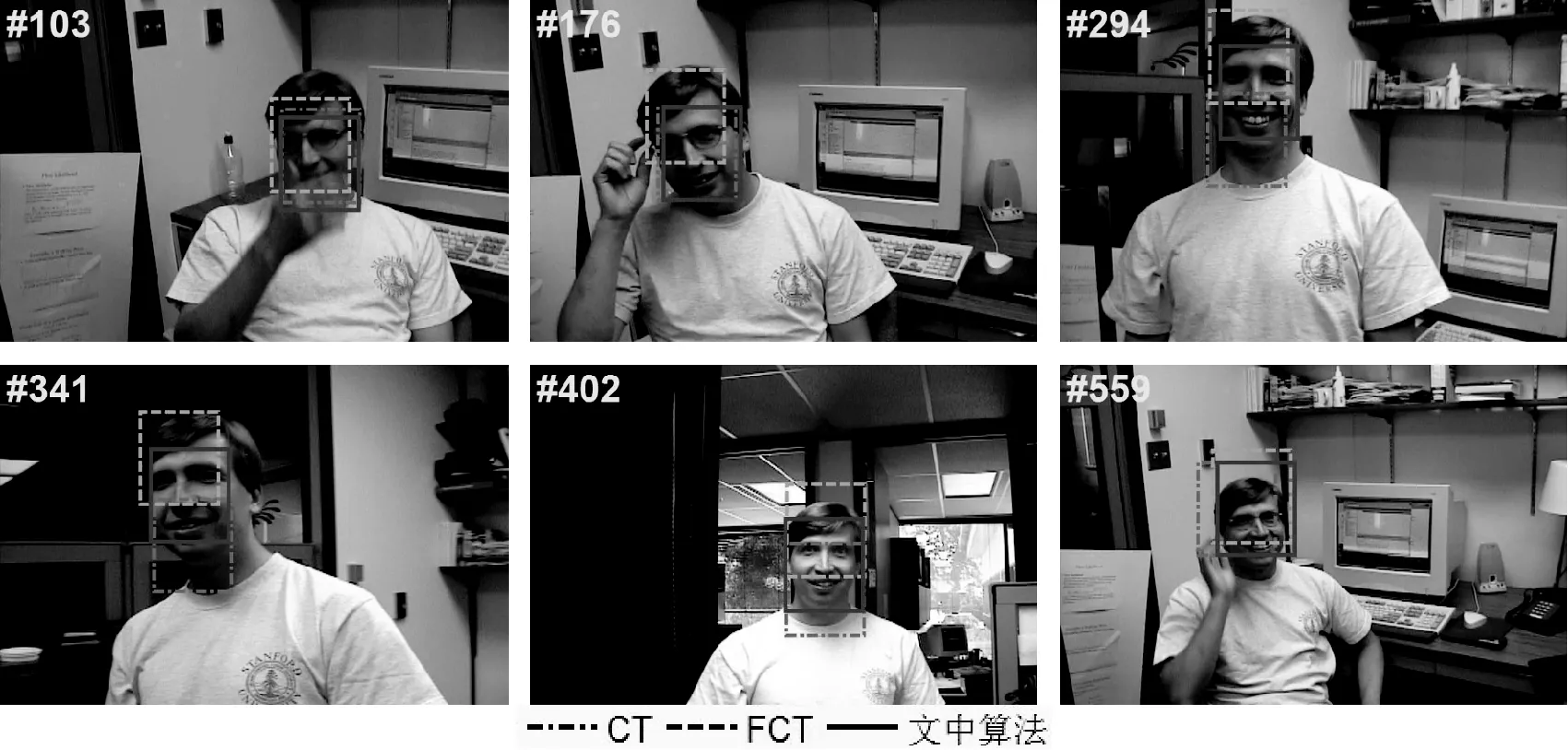
图4 dudek序列跟踪结果

图5 faceocc1序列跟踪结果
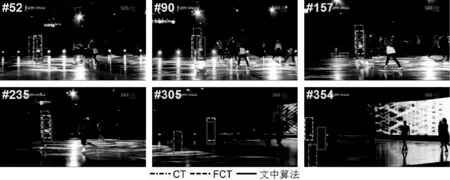
图6 skating1序列跟踪结果

图7 david序列跟踪误差曲线图
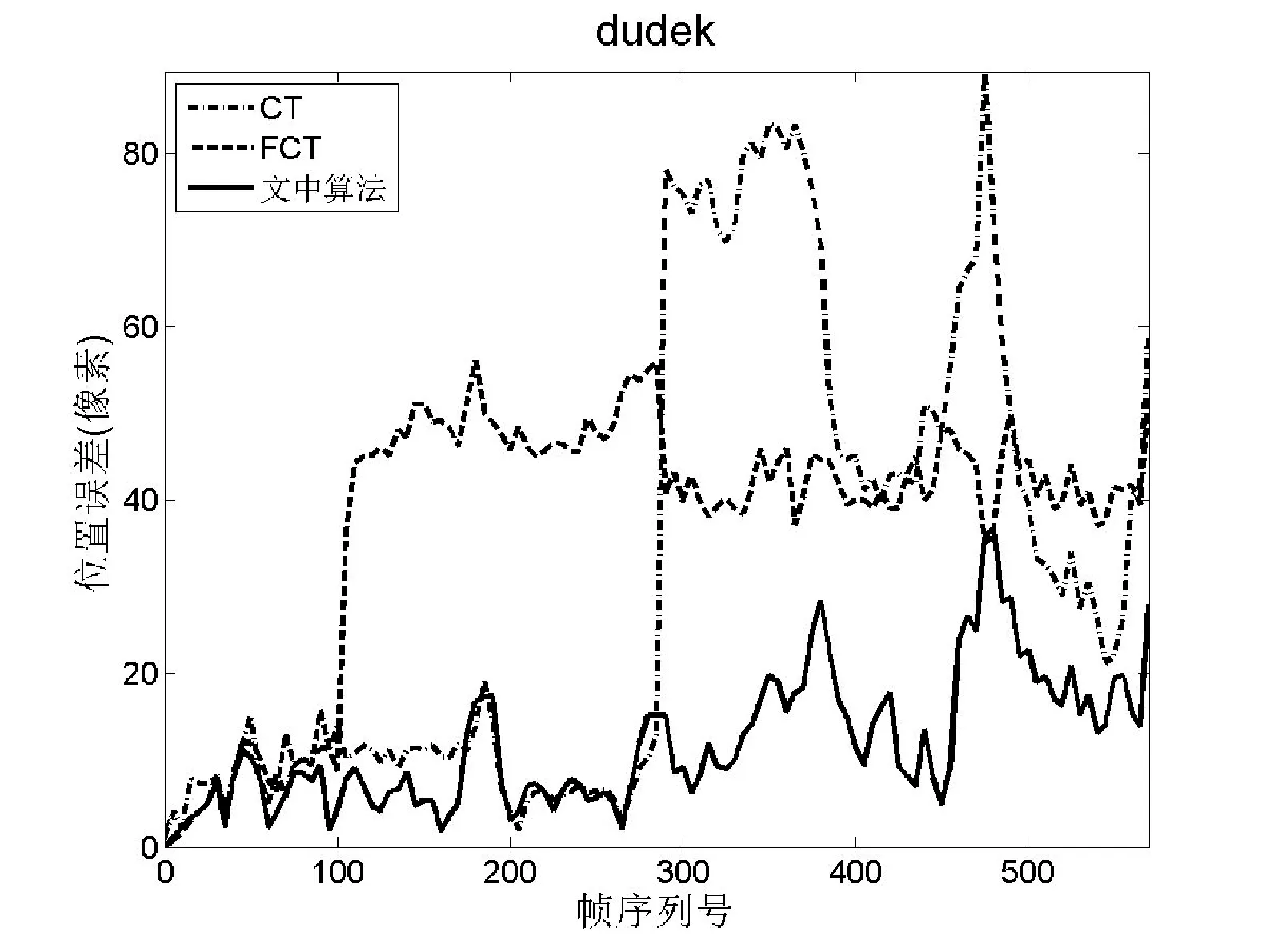
图8 dudek序列跟踪误差曲线图
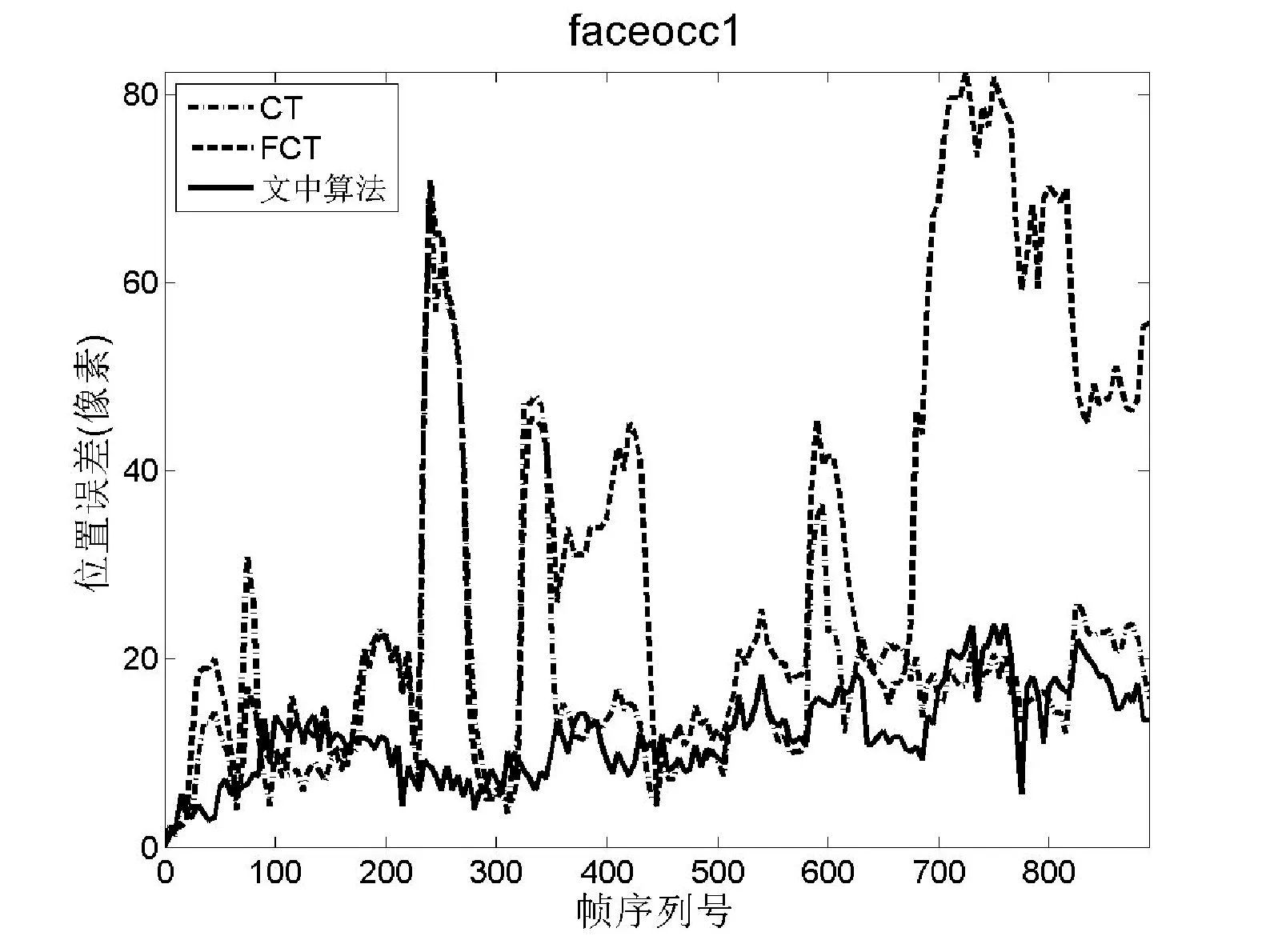
图9 faceocc1序列跟踪误差曲线图
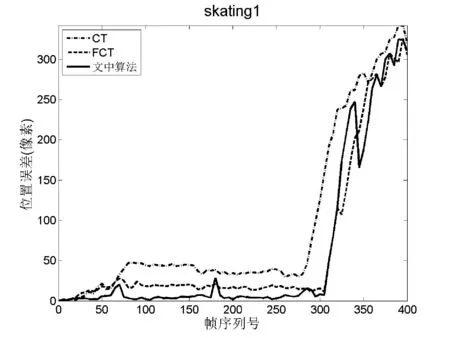
图10 skating1序列跟踪误差曲线图
表4给出了三种算法每帧的平均时耗对比。本文的改进算法在生成目标高维特征描述及度量目标与候选样本之间相似性时增加了较少的计算量,使得改进的算法在时间上增加的开销很小。由表4的时耗对比可得,三种算法均能达到实时的要求。
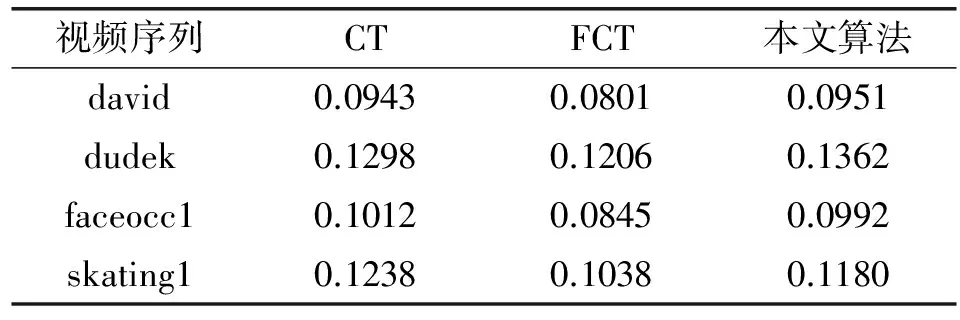
表4 平均时间 s/帧
对于david视频序列,最主要的难题就是光照变化,同时还有形变及尺度变化等问题。对于CT算法,当目标的光照变化和纹理变化不大的情况下跟踪较为准确,但视频序列在第130帧左右时目标姿态发生变化,CT的跟踪结果开始偏移。在第336帧左右时发生光照变化,此时跟踪结果偏移加剧,甚至在549~654帧发生漂移。之后,当目标再次进入跟踪框以后又跟踪到目标(如图3所示)。FCT算法在第336帧附近视频序列发生光照变化时,跟踪也不是很稳定(如图3所示)。本文针对这一问题,进行了改进。在文中提出的算法中,通过获取高效的高维特征描述,从而得到更加有效的低维压缩特征用于分类。同时采用改进的相似性度量方法,当视频序列中发生光照变化时,仍可以获得准确的跟踪结果(如图3所示)。
对于遮挡问题,dudek视频序列和faceocc1视频序列都体现了这一难题。dudek视频序列在第103帧左右时发生遮挡,由跟踪结果可以看到CT和FCT算法均发生偏移(如图4所示)。对于本文的算法,由跟踪结果(如图4所示)可以看到改进的算法对于遮挡现象具有更强的鲁棒性。faceocc1视频序列最主要的挑战就是遮挡。在视频序列中,当目标发生遮挡时,由跟踪结果易观察到CT和FCT算法的跟踪均不稳定,而改进的算法跟踪结果仍很准确(如图5所示)。同时,dudek视频序列挑战了形变和移动等问题。在第176帧和第286帧左右时目标发生了形变和移动,我们可以看到CT和FCT算法的跟踪结果在后续视频帧中均发生了大的偏移,本文算法则有效地抑制了这一现象,确保了跟踪的准确性(如图4所示)。
对于skating1视频序列挑战的难题有复杂背景和光照等。对于CT算法,在第75帧左右时目标背景和光照发生变化,其跟踪结果有所偏移。同时,视频序列从第282帧开始背景和目标差别不太明显,此时CT算法跟踪结果出现误差,并发生漂移(如图6所示)。对于FCT算法和文中的改进算法,在305帧之前的视频序列中均实现了跟踪目标的鲁棒性(如图6所示),但是对于跟踪目标的精确性,本文的算法效果更好。在305帧以后的视频序列中,由于目标和背景较为相似,在跟踪结果中开始出现误差,并发生漂移。因此,对于复杂背景下目标和背景差别不大的情况,本文算法仍具有一定的局限性,没有达到很好的效果。
综上,相对于CT算法和FCT算法,本文提出的改进算法获得了良好的跟踪结果。随着滤波器尺寸的增大,通过滤波获取的图像的有效特征越少,这对于跟踪过程很不利,极易在目标受到遮挡、光照等因素影响时引入误差。因此,本文在生成目标高维特征时,采用自适应的权值分配机制,考虑不同尺度滤波器生成特征的有效性,获取高效的特征描述。同时,算法在度量目标与候选样本之间相似性时,不仅考虑叠加和,还计算各维压缩特征被分类为目标压缩特征的可能性,由两者共同决定跟踪结果。通过以上实验证明,提出的改进算法在目标受到遮挡、光照、形变等因素的影响时,仍能获得准确、稳定的跟踪结果,相比较另两种算法具有明显的优势。
5 结 语
本文针对文献[12]中FCT算法中存在的问题,提出了特征加权的快速压缩感知跟踪算法。算法通过一定的权值分配机制,将不同尺度滤波器卷积获得的特征赋予不同的权值,从而获取高效的高维特征描述。同时算法在原分类器简单叠加的基础上,统计每个弱分类器分类结果为正样本的个数,由两者共同决定跟踪结果,有效提高了目标跟踪的准确性。对不同视频序列的跟踪结果表明,文中提出的改进算法在目标发生遮挡以及光照等变化时能够获得更准确的跟踪结果。但是当跟踪目标和背景较为相似时,文中算法仍具有一定的局限性,同时本文没有提出针对尺度变化的解决方案,如何有效地解决这些问题,是本文后续的研究重点。
[1] 高文,朱明,贺柏根,等.目标跟踪技术综述[J].中国光学,2014,7(3):365-375.
[2] Kalal Z,Mikolajczyk K,Matas J.Tracking-learning-detection[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,2012,34(7):1409-1422.
[3] Zhang K,Zhang L,Liu Q,et al.Fast visual tracking via dense spatio-temporal context learning[C]//13th European Conference on Computer Vision.Springer International Publishing,2014:127-141.
[4] Henriques J F,Caserio R,Martins P,et al.Exploiting the circulant structure of tracking-by-detection with kernels[C]//12th European Conference on Computer Vision,2012:702-715.
[5] Wang D,Lu H,Yang M H.Least soft-thresold squares tracking[C]//2013 IEEE Conference on Computer Vision and Pattern Recognition,2013:2371-2378.
[6] 袁雪,宋永端.目标跟踪算法在光照突变条件下的应用[J].应用科学学报,2011,29(6):592-597.
[7] 许晓航,肖刚,云霄,等.复杂背景及遮挡条件下的运动目标跟踪[J].光电工程,2013,40(1):23-30.
[8] 张彦超,许宏丽.遮挡目标的分片跟踪处理[J].中国图象图形学报,2014,19(1):92-100.
[9] 尹宏鹏,刘兆栋,柴毅,等.压缩感知综述[J].控制与决策,2013,28(10):1441-1445,1453.
[10] 任越美,张艳宁,李映.压缩感知及其图像处理应用研究进展与展望[J].自动化学报,2014,40(8):1563-1575.
[11] Li H,Shen C,Shi Q.Real-time visual tracking using compressive sensing[C]//2011 IEEE Conference on Computer Vision and Pattern Recognition,2011:1305-1312.
[12] Zhang K,Zhang L,Yang M H.Fast compressive tracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2014,36(10):2002-2015.
[13] Achlioptas D.Database-friendly random projections:Johnson-Lindenstrauss with binary coins[J].Journal of Computer and System Sciences,2003,66(4):671-687.
[14] Baraniuk R,Davenport M,DeVore R,et al.A simple proof of the restricted isometry property for random matrices[J].Constructive Approximation,2008,28(3):253-263.
[15] Diaconis P,Freedman D.Asymptotics of graphical projection pursuit[J].The Annals of Statistics,1984,12(3):793-815.
[16] Zhang K,Zhang L,Yang M H.Real-time compressive tracking[C]//Proceedings of the 12th European Conference on Computer Vision.Springer,2012:864-877.
FAST COMPRESSIVE SENSING TRACKING BASED ON FEATURE WEIGHTING
Zhao Duan Xie Qi
(SchoolofInformationEngineering,ZhengzhouUniversity,Zhengzhou450001,Henan,China)
The target tracking algorithm based on compressive sensing is simple, real-time and efficient. Fast compressive tracking algorithm (FCT) generates high dimensional features of the target without considering the effectiveness of different scale filter generation features, and the similarity measure between target and candidate sample only considers simple superposition. It is easy to make the tracking result deviate under the influence of external factors such as illumination and occlusion. Aiming at these problems, a fast compressive sensing tracking algorithm based on feature weighting is proposed. The algorithm adaptively assigns weights according to the filter scale, and generates high dimensional features of the target. The likelihood of the algorithm to classify each dimension compression feature of the candidate sample as the target compression feature is multiplied by the Bayesian classifier output, which is used as a measure of similarity between the target and the candidate sample. The experimental results show that the proposed method is more robust to the influence of external factors such as illumination and occlusion.
Object tracking Compressive sensing Real time Feature weighting
2016-05-10。赵端,硕士生,主研领域:目标跟踪。谢琦,教授。
TP3
A
10.3969/j.issn.1000-386x.2017.06.036
猜你喜欢
中国机械工程(2022年8期)2022-05-09 12:32:02
中国机械工程(2021年8期)2021-05-07 05:49:10
音乐教育与创作(2019年8期)2019-05-16 04:06:34
测控技术(2018年4期)2018-11-25 09:46:48
电子测试(2018年1期)2018-04-18 11:52:35
电信科学(2017年6期)2017-07-01 15:44:37
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
数学年刊A辑(中文版)(2015年3期)2015-10-30 01:56:52
应用数学与计算数学学报(2014年3期)2014-09-26 12:03:56
