
地面GPS自主导航车的设计
2017-07-08 08:11齐建家王腾飞
价值工程 2017年21期
齐建家++王腾飞
摘要:设计了一种自主导航车,以OpenWrt嵌入式Linux系统作为导航车的控制核心,包含电源模块、电机驱动电路、GPS模块,超声波测距模块及相应软件设计方案。通过GPS模块确定位置信息,结合超声波测距检测路面状况,处理器内部程序控制直流电机的转速以及转向和伺服电机进行导航车行进方向控制,从而使小车能够沿着规划轨迹自动行驶,实现小车自主导航的目的。试验结果表明,整个系统的电路结构简单,可靠性高,程序运行稳定,实现了预期的自主导航功能。
Abstract: The paper designs an autonomous navigation vehicle based on OpenWrt used embedded Linux control system as the core of the car navigation, including power module, motor drive circuit, GPS module, ultrasonic ranging module and the corresponding software design. It determines the location information through the GPS module, combined with ultrasonic detection of pavement condition, internal processor program controls DC motor speed and steering, vehicle navigation control and direction of the servo motor, so that the car can achieve automatic driving along the trajectory planning, car navigation purposes. The test results show that the whole system has simple circuit structure, high reliability, stable program operation, and achieved the desired autonomous navigation function.
關键词:自主导航;智能车;GPS定位;OpenWrt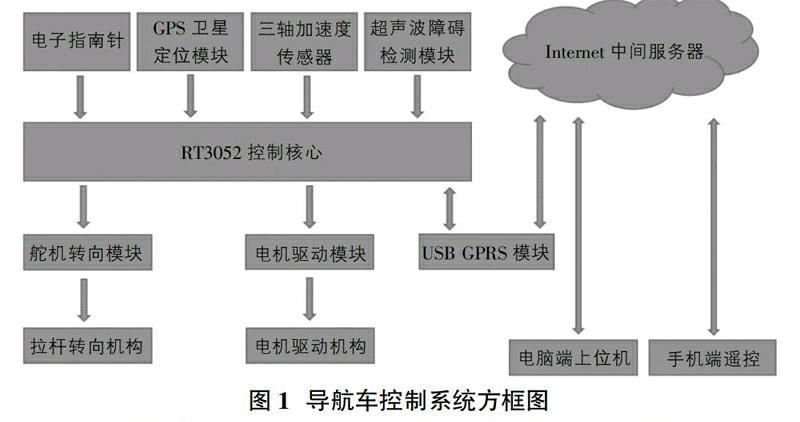
Key words: autonomous navigation;intelligent vehicle;GPS positioning;OpenWrt
中图分类号:P228.4 文献标识码:A 文章编号:1006-4311(2017)21-0139-02
0 引言
GPS自动导航小车作为移动机器人的一种,搭配上各种车载传感器,感知周围的环境,小车通过获取GPS卫星定位接收模块和电子罗盘发出的数据,规划小车的行驶路径,同时系统自动多次校正行驶方向与行驶距离。系统成本低而精度高。
GPS地面自主导航车的组成单片机控制是一个实现现代工业自动化的典型系统,它主要由运动机构、控制部分、信息处理部分及辅助部分四大部分组成,其中控制部分是整个车导航过程的核心,常被称为其运动的心脏。其主要根据上位机传递过去的一系列经纬度信息,通过GPS卫星定位模块实时获取当前位置信息,并根据目标位置信息实时调整应该行进的方向和速度,同时使用超声波距离传感器探测前方的障碍物,并及时避过,控制器输出PWM信号控制直流电机和舵机从而控制了导航车的行进速度和方向。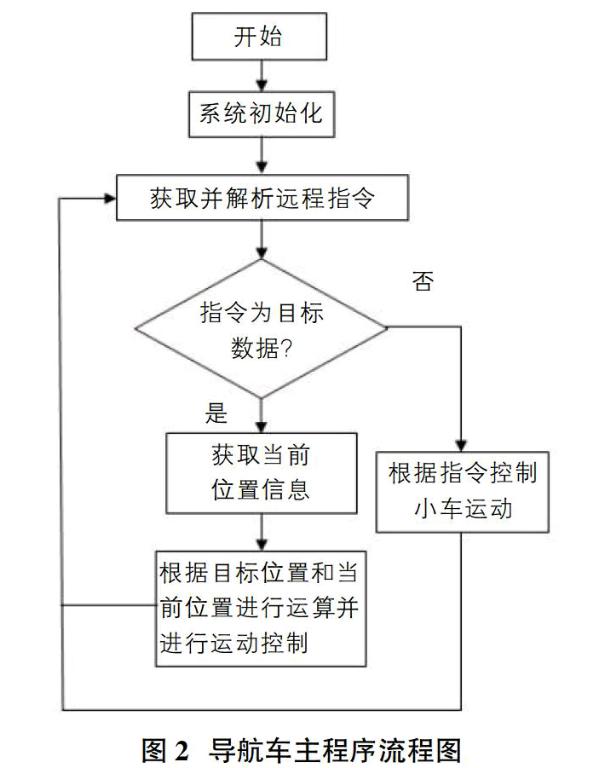
1 导航车硬件设计
导航车以RT3052为控制核心,硬件包括电源管理模块、电机驱动模块、GPS导航模块、舵机转向模块、超声波障碍检测模块、GPRS通信模块、上位机控制软件和手机端遥控软件,其中上位机控制软件使用C#编写,与控制核心通过中间服务器(有公网IP地址)中转通信。导航车总体框图如图1所示。
智能车采用RT3052作为系统的控制核心,它负责各个模块之间的相互协调工作,接收来自GPS卫星定位模块获取到的位置信息,电子指南针的信息和三轴加速度传感器的信息,采用惯性导航算法对这些信息进行处理,形成合适的控制量,对转向/动力电机进行控制,保证导航车能安全有效地到达目标点。同时在行驶的过程中还通过UDP协议把运行过程中的关键信息发送到上位机软件,由上位机软件进行监视和控制。
电源管理模块:导航车通过一个2S镍氢电池给直流电机和转向舵机供电,同时镍氢电池经过稳压虑波电路给控制核心板各个传感器供电,以减小动力电路和控制电路之间的干扰。
电机驱动模块:电机驱动部分由一个直流有刷电机和两个微型伺服电机组成,直流有刷电机使用大功率MOS控制,由处理核心发送PWM信号控制电机的转速和转向。伺服电机使用半双工串口通信,半双工串口经缓冲电路转换成TTL电平串口与处理核心通讯,处理核心通过控制两个伺服电机的位置参数对前后轮的转向进行控制,更加灵活地转向。
GPS导航模块:使用双模北斗卫星定位模块,控制系统核心通过全双工异步串口协议与GPS模块进行通信,并实时解析出当前的经纬度信息。
超声波障碍检测模块:由于超声波也是一种声波,其声速C与温度有关。在使用时,如果温度变化不大,则可认为声速是基本不变的。常温下超声波的传播速度是334米/秒,但其传播速度V易受空气中温度、湿度、压强等因素的影响,其中受温度的影响较大,如温度每升高1℃,声速增加约0.6米/秒。如果测距精度要求很高,则应通过温度补偿的方法加以校正(本系统正是采用了温度补偿的方法)。已知现场环境温度T时,超声波传播速度V的计算公式为:V=331.45+0.607T。声速确定后,只要测得超声波往返的时间,即可求得距离。
电子指南针模块:使用数字罗盘IC,控制系统核心通过I2C协议实时读取导航车的方向信息。
转向舵机模块:由于道路情况复杂,导航车需要不停地调整转向以适应环境的变化,转向舵机模块为导航车的方向控制执行机构。控制系统核心通过对外围传感器获得的一系列信息进行分析计算,输出PWM信号来控制舵机的方向,以准确地按照预定规划的路径行驶。
三轴加速度传感器传感器部分:由三轴加速度传感器来获得车体姿态和加速度,由电子指南针获得车体方向,GPS卫星定位模块获得地理位置信息,超声波测距传感器获得周围障碍物情况。
通信部分由控制核心openwrt挂载USB 3G网卡,通过有公网IP地址的服务器与电脑端上位机之间实现数据通信,在保证了连接可靠性的同时去除了传统遥控的距离限制。
車体结构部分使用一个直流有刷电机驱动四个轮子。前后两个转向机构,能够更加灵活地改变车的姿态,可适应复杂的地形。
2 导航车的软件设计
电脑端上位机使用C#语言编写,调用百度地图API获取卫星地图信息,并根据道路信息和周围建筑物信息进行路径规划。同时实时接收导航车的详细信息,进行导航路径参数的下载、上传,和导航车的运动以及模式控制。
手机端APP与导航车之间同样经公网服务器与导航车通讯,控制导航车的运行模式和运动姿态。手机端APP仿照赛车游戏的控制界面,充分考虑手动模式的易操作性。
导航车的运行模式有航迹规划模式、自主导航模式、手动控制模式、回家模式。
其中航迹规划模式中航迹规划任务由上位机软件处理:上位机软件根据导航车的位置信息在视图里显示附近的卫星地图,根据导航车的起点和要到达的终点和卫星地图的路况在中途添加一系列中间点,构成完整路径信息并发送到导航车。
手动控制模式中导航车在行进过程中会缓存之前走过的点,在行进方向改变时候会记录转弯点,并去除路径中的直线点,最后获得路径信息。
自主导航模式中导航车根据上位机传输或者手动行驶过程得到的路径信息进行行驶速度以及方向控制,同时由超声波传感器测量前进方向的障碍物距离,并在保证最终目标点不变的前提下适当地进行局部路径的重新规划同时提醒上位机。
在导航车与上位机连接丢失或者上位机强制切换模式到回家模式时候,导航车会以启动时候的位置为终点,原路返回。
其主程序流程图如图2。
■
3 结束语
本文设计的自主导航车获取上位机发送的路径信息后,在进行导航的同时进行避障的同时,将车的各种信息通过GPRS网络传输到电脑端,由上位机软件进行分析控制。该控制系统运用了嵌入式Linux、单片机、GPS卫星定位、电子罗盘、超声波测距、直流电机、PWM调速等技术,基本实现了GPS导航车辆的要求,如果将智能车技术与互联网、云计算等技术结合在一起,实现最优路径规划,那么将有望解决城市交通拥堵难题,如果城市专门划出一条公交道路,则完全可以实现公交车无人驾驶化。
参考文献:
[1]陈淑艳.移动机器人履带行走装置的构型与机动性能研究[D].扬州:扬州大学,2008.
[2]陈孟元.基于图像识别的循迹智能车设计[J].重庆理工大学学报,2013.
[3]隆文革,王艾伦.便携式四轮履机器人的设计与仿真[J].机床与液压,2008,36(1).
[4]何希才,薛永毅.传感器及其应用实例[M].北京:机械工业出版社,2004.
[5]孙宝元,杨宝清,主编.传感器及其应用手册[M].北京:机械工业出版社,2004.
[6]王密,郭丙轩,雷霆,李德仁.车载GPS导航系统中GPS定位与道路匹配方法研究[J].武汉测绘科技大学学报,2000(03):248-251,256.
[7]匡翠林,刘经南,赵齐乐.低轨卫星与GPS导航卫星联合定轨研究[J].大地测量与地球动力学,2009(02):121-125.
[8]杨元喜,张双成,高为广.GPS导航解算中几种非线性Kalman滤波的理论分析与比较[J].测绘工程,2005(03):4-7,25.
[9]邵婷婷,马建仓,胡士峰,王超.电子罗盘的倾斜及罗差补偿算法研究[J].传感技术学报,2007(06):1335-1337.
[10]侯鸿斌.嵌入式通用运动控制系统的研究与应用[D].华南理工大学,2010.
猜你喜欢
军民两用技术与产品(2021年10期)2021-11-25
电子制作(2018年17期)2018-09-28
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
科学与财富(2016年28期)2016-10-14
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
水利科技与经济(2016年4期)2016-04-22
学习月刊(2015年3期)2015-07-09
