RFID技术在列车高精度定位中的应用
2017-07-07 13:04:04刘小磊
都市快轨交通 2017年3期
刘小磊, 黄 璞
(1. 杭州市地铁集团有限责任公司, 杭州 310017; 2. 杭州杭港地铁有限公司, 杭州 310017)
RFID技术在列车高精度定位中的应用
刘小磊1, 黄 璞2
(1. 杭州市地铁集团有限责任公司, 杭州 310017; 2. 杭州杭港地铁有限公司, 杭州 310017)
在CBTC(基于通信的列车控制)系统中,列车定位的精确性是保证列车安全高效运行的前提,而基于RFID(radio frequency identification,无线射频识别)的列车定位技术,是提供高精度列车定位的技术条件。从电子标签、读写器、系统高层3方面对RFID技术工作原理进行阐述,并介绍基于不同设计标准的RFID铁路应答器的技术指标及工作原理;分析影响列车定位精度的列车位置不确定性产生的3种因素(测速误差、轮径误差和应答器校正误差),提出通过RFID铁路应答器消除列车位置不确定性,提高列车精确定位的方法,并通过实测数据,验证RFID技术高精度定位的可行性,即在不同行车速度下,RFID技术均能准确完成列车定位,RFID应答器响应时间均在0.2 s以内,实际定位误差均未超过测量值的2%,可以满足轨道交通中低速CBTC列车辅助定位的需求。
城市轨道交通; 基于通信的列车控制系统(CBTC); 无线射频识别(RFID)技术; 列车定位; 列车不确定性; 应答器
1 研究背景
目前,新建城市轨道交通列车基本采用CBTC(基于通信的列车控制)系统运营,随着列车运营间隔的不断缩短以及ATO(列车自动驾驶系统)高精 度 停 站 的需求,对列车定位精度提出更高的要求。当前,主流信号设备厂商均采用RFID(radio frequency identification,无线射频识别)技术作为列车定位的辅助设备,以提高CBTC列车的定位精度。随着ETCS(欧洲列车控制系统)及CTCS(中国列车控制系统)技术在客运专线等国内外高铁线路的应用,RFID辅助列车定位技术也得到了广泛的应用。
2 RFID技术概述
RFID技术是自动识别技术的一种,它通过无线射频信号获取物体的相关数据,并对物体加以识别。RFID技术无需与被识别物体直接接触,即可完成信息的输入和处理,能快速、实时、准确地采集和处理信息[1]。
RFID因应用不同,其组成也会有所不同,但基本都是由电子标签、读写器和系统高层这三大部分组成。RFID系统的结构框图如图1所示[2]。
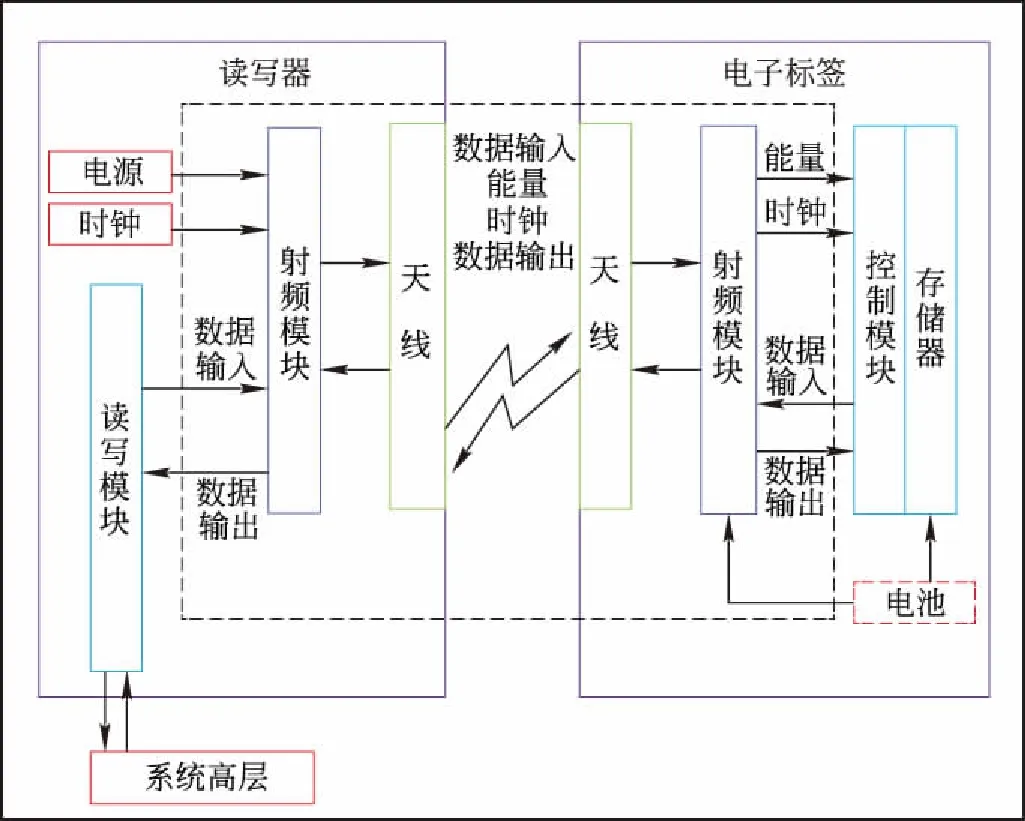
图1 RFID系统结构框图Fig.1 RFID system structure
2.1 电子标签
电子标签由芯片及天线组成,附着在物体上用以标识目标对象,每个电子标签具有唯一的电子编码,存储着被识别物体的相关信息。
2.2 读写器
读写器是利用射频技术读写电子标签的设备。当RFID系统工作时,首先由读写器发射一个特定的询问信号;电子标签收到这个信号后,就会给出应答信号,应答信号中含有电子标签携带的数据信息;读写器接收这个应答信号,并对其进行处理,然后将处理后的应答信号传输给外部主机,进行相应操作。
2.3 系统高层
系统高层针对不同的设定做出相应处理,发出指令信号,并控制执行机构动作。
目前,RFID在票务系统[3](城市公交车、轨道交通AFC、高速公路收费、门票等)、收费卡、食品安全追踪、第二代身份证、门禁系统、防盗、集装箱识别、物流系统等众多领域获得广泛应用。
3 RFID铁路应答器简介
CBTC系统是利用不依赖于轨道电路的高精度的列车定位、双向连续、大容量的车—地数据通信以及车载、地面的安全功能处理器,实现连续自动列车控制的一种系统[4]。如今采用RFID技术的铁路应答器已广泛应用在CBTC运营线路,用于列车定位、提供线路数据和列车移动授权等。
铁路应答器RFID系统由应答器标签、应答器天线和应答器主机组成[5],标签根据设计标准可分为美式标签(简称美标)和欧洲应答器(简称欧标)两种,它们均广泛用于国内轨道交通,根据不同信号系统平台设计分别采用,特性比较可参见对应标准,本文总结主要差异见表1。另根据供电方式可分为有源应答器和无源应答器两种。CBTC系统中所使用的均为无源应答器,无源应答器详细数据见表1[6]。
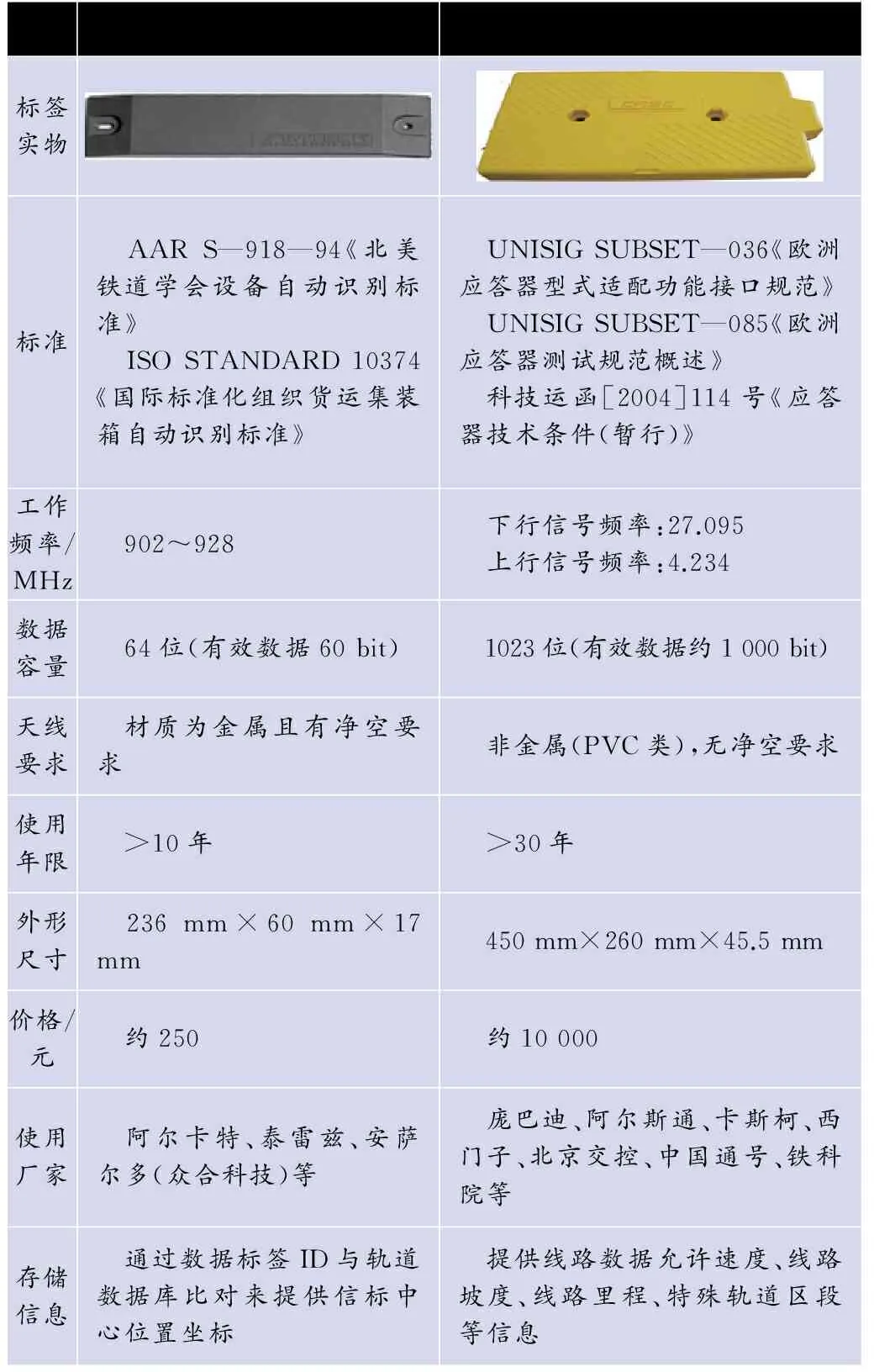
表1 无源应答器对比
4 列车位置不确定性对定位的影响
4.1 列车位置不确定性概念
CBTC轨旁ATP(列车自动防护)需要在适当的精度和充分完整性的条件下实时获取列车位置信息,并根据列车位置实时计算出列车移动授权。CBTC列车在定位过程中,由于各种因素会导致系统误差,该误差值称为列车位置不确定性。在CBTC移动闭塞模式下,移动授权终点应位于前行列车的后面,轨旁ATP为列车计算移动授权时,需包含列车位置不确定性,以保证两车的安全运行间隔[7]。
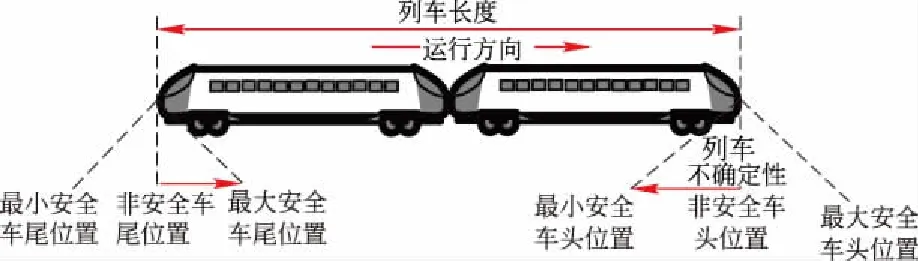
图2 列车安全位置示意Fig.2 Train vital position
4.2 不确定性产生因素
产生定位误差的因素主要有测速设备测量的不确定性、轮径校准误差和应答器校正误差等。
4.2.1 测速误差
当前普遍采用的测速设备为光电速度传感器,将其安装在车轮上,通过计算车轮旋转在测速传感器里产生的脉冲数来测量列车的速度和距离。
速度传感器向车载ATP设备发送脉冲,车轮每转1圈都发送固定数量的脉冲。车载ATP设备对脉冲进行计数以确定列车速度。速度传感器可以非常精确地检测“零速度”,最小可以检测到0.1 km/h,能够检测到的最小位移大约是3 cm,在移动闭塞区间内测量运行列车位置精度误差不大于10 m。
如果T是车载ATP设备获得N个脉冲的时间,Nw是车轮每转1圈的脉冲数,D是车轮直径,可以得到列车速度v为:
传感器脉冲数直接影响列车速度测量的精度,从而影响列车定位的准确性。
4.2.2 轮径误差
如果D是车轮直径,Nw是车轮每转1圈的脉冲数,可以得到车载ATP设备获得速度传感器N个脉冲后列车的走行距离S:
如果列车轮径出现误差,如车轮磨损或轮径值设定不准确等,随着运行距离的不断增加,将导致列车位移误差呈线性增长,影响列车定位的准确性。
4.2.3 应答器校正误差
应答器的校正误差由应答器及车载天线的位置安装误差和应答器接收偏差组成。由于应答器与车载天线间使用RFID射频方式进行通信,其通信信号有一定的辐射范围,辐射面呈扇形区,故应答器及车载天线的安装有着严格的安装精度要求。人工安装误差始终存在且无法避免,所以计算列车不确定性时需考虑最坏安装情况下的误差值[8]。
另外,由于受应答器辐射范围及列车获得应答器信息时延的影响,从列车收到并正确处理信息到应答器接收信息中的应答器坐标点与实际存在一定偏差,影响列车测距误差,故计算列车不确定性时需考虑最坏情况下的应答器接收偏差值。应答器辐射范围如图3所示。
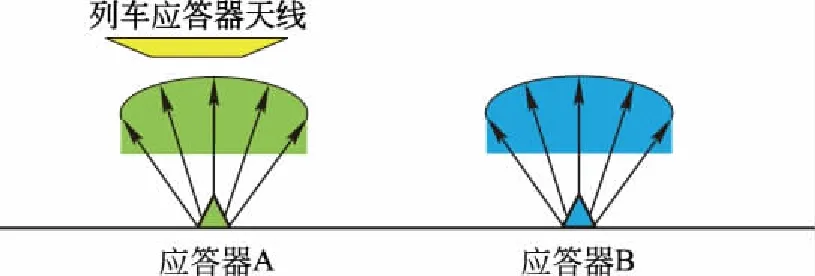
图3 应答器辐射范围示意Fig.3 Transponder radiation range
5 RFID应答器对列车定位的作用
5.1 列车自动轮径校准
为降低列车轮径误差引起的列车不确定性,提高其定位精度,CBTC系统提供自动轮径校准功能,当列车车轮磨损或其他原因变化后可获得列车最新的实际轮径值。自动轮径校准(见图4)功能通过精确布置在转换轨(有些厂家安装在区间)附近的两个连续RFID应答器实现,列车在进入正线之前或者退出运营回库时,可完成对列车轮径的自动校准。

图4 列车自动轮径校准示意Fig.4 Auto wheel-diameter calibration
自动轮径校准过程:利用速度传感器测出列车经过两个应答器的转动圈数,根据列车运行距离等于车轮转动圈数乘以列车车轮周长(列车车轮周长等于当前轮径值乘以圆周率π),计算得到列车的运行距离,将该运行距离与所述实际距离进行比较,若该运行距离等于所述实际距离,则表示当前车轮磨损不明显,此时不需要校准轮径值,若该运行距离大于所述实际距离,则表示车轮有磨损,需要校准轮径值。轮径更新值Dn等于两应答器间安装距离(该距离已写入系统电子地图)与列车的行走距离之比再乘以校正前的轮径值,即:
其中,D是车轮直径,Nw是车轮每转1圈的脉冲数,S为两应答器间安装距离,N为列车在两应答器间走行所获得的脉冲数。
5.2 列车位置定位
列车位置定位(见图5)是列车依靠CBTC系统有效运行的前提条件[9],列车初始位置定位是凭借两个连续RFID应答器实现的,当车载信号系统接收到第1个应答器ID信息后,依此从线路数据库中查询到列车所在的位置坐标,当接收到第2个应答器ID信息时,根据读到的两个应答器所在的线路位置坐标,判断出列车运行的方向,从而对列车运行做出精确定位。

图5 列车定位示意Fig.5 Train locating
5.3 列车位置校准
列车位置不确定性随着列车运行里程的增加呈规律性变化。根据不确定性值的变化规律,可分为固定误差和累积误差,固定误差主要由应答器校正误差构成,累积误差主要由测速误差(含传感器计算误差、车轮磨损计算误差等)构成,累积误差随着行驶里程的增加而呈线性增长。
为了减少列车不确定性持续增长对列车运行安全的影响,引入了应答器对列车的位置进行校准。在线路上每隔一段固定距离铺设一个应答器,列车在经过应答器时获得该应答器的ID信息,并依据ID信息从线路数据库中查询到列车所在的精确线路位置坐标,将不确定性累积误差值清零。考虑到应答器自身的校正误差,不确定性固定误差值始终存在,无法消除。当列车从x0点应答器运行到x点应答器时,其不确定性计算表达式如下:
ε(x-x0)=εg+εl(x-x0)
其中,ε表示列车不确定性误差,εg表示固定误差,εl表示累积误差。
CBTC列车在运行过程中,通过布置在线路上的应答器不断校准,列车不确定性变化趋势见图6。
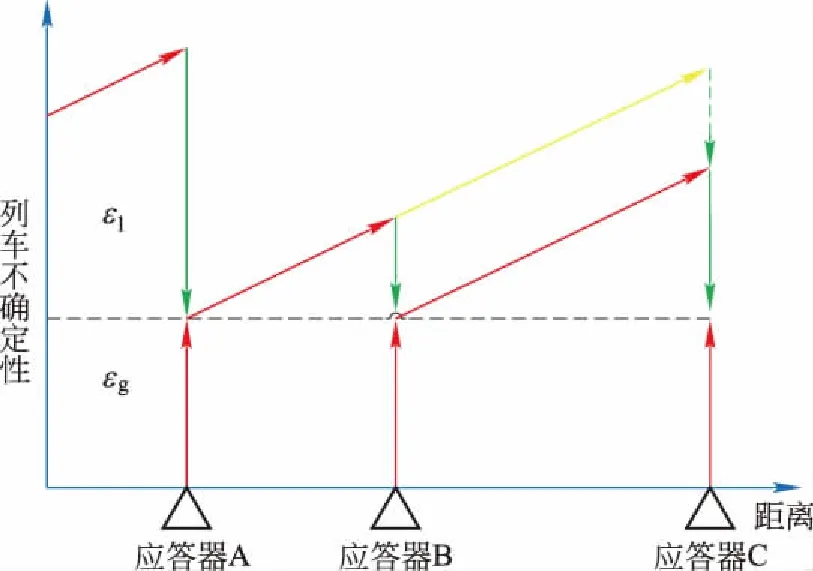
图6 列车不确定性变化趋势Fig.6 The changing trend of train uncertaincy
列车每通过一个应答器,如图6中实线部分,累积误差就清零一次,列车位置被校准,列车不确定性缩小;当其中一个应答器B信息丢失未被正确校准,如图6中虚线部分,且列车到达C应答器时,不确定性将远大于被应答器B校准后的值。当多个应答器信息连续丢失时,不确定性值将呈线性增长,影响列车的运行安全。所以,目前通用设计是当连续丢失2个应答器时,列车即触发紧急制动。
5.4 RFID应答器定位精度验证
当列车与RFID应答器相互作用时,列车需及时获得应答器的数据,以保证列车精确定位;而RFID应答器固有的校准误差,直接影响列车的定位精度。根据《城市轨道交通CBTC信号系统:ATP子系统规范》要求[10],车载信号设备自接收到地面信息至完成处理的时间应小于或等于0.75 s,列车位置最大测量误差小于或等于2%。为验证RFID应答器是否满足相关轨道交通参数要求,特选用Transcore厂家的一款铁路RFID应答器,测试列车在不同速度下RFID应答器的响应时间及所对应的测距误差。
应答器响应时间测试结果如表2所示。

表2 应答器响应时间记录
不同行车速度下的定位误差,由固定误差和RFID应答器校准实际误差组成,而固定误差为旁瓣和应答器安装等无法消除的误差。应答器的定位误差测试结果如表3所示。
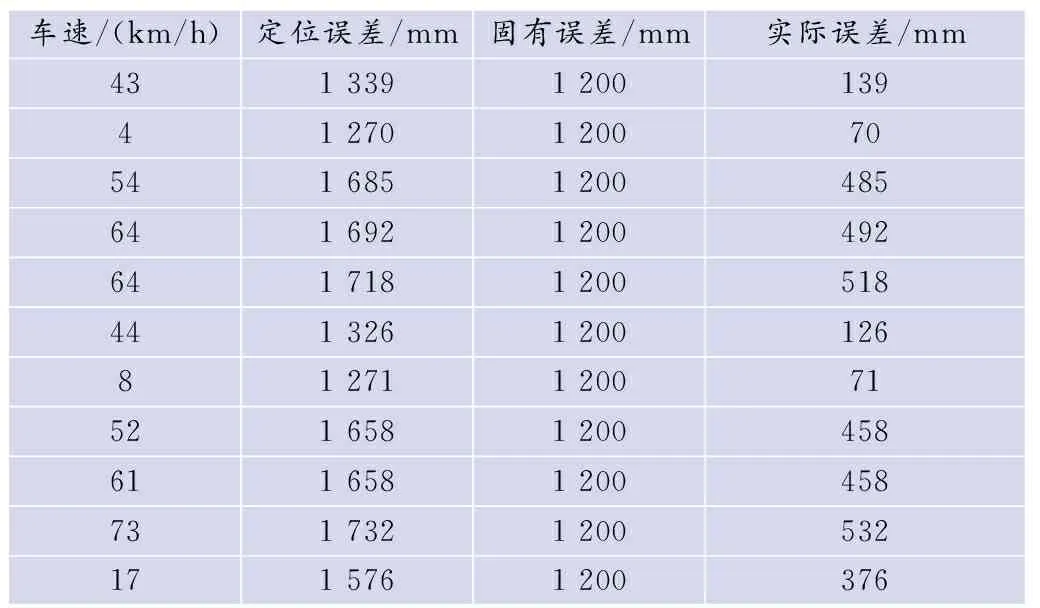
表3 应答器定位误差记录
测试结果表明,不同行车速度下,RFID技术均能准确完成列车定位,RFID应答器响应时间均在0.2 s以内,实际定位误差均未超过测量值的2%,满足轨道交通中低速CBTC列车辅助定位的需求。
6 结语
列车定位是CBTC列车正常运行的基础条件,其精度和可靠性是确定列车安全防护距离的重要因素。基于RFID技术的铁路应答器可满足CBTC列车定位需求,配合列车电子地图消除列车定位误差,精准地确定列车在线路上的位置,保证CBTC列车的安全运行,在CBTC列车定位系统中起着非常重要的作用。
[1] 黄玉兰.物联网:射频识别(RFID)核心技术详解[M].北京:人民邮电出版社,2012:20.
HUANG Yulan.Radio frequency identification development internals[M].Beijing: POSTS & Telecom Press, 2012: 20.
[2] 吴汶麟.轨道交通运行控制与管理[M].上海:同济大学出版社,2004.
WU Wenlin.Railway operation control & management[M].Shanghai: Tongji University Press, 2004.
[3] 董丽华.RFID技术与应用[M].北京:电子工业出版社,2008.
DONG Lihua.RFID technology & its application[M].Beijing: Publishing House of Electronics Industry, 2008.
[4] 汪希时.智能铁路运输系统ITS-R[M].北京:中国铁道出版社,2004:1-5.
WANG Xishi. The railway intelligent transportation system[M].Beijing: China Railway Publishing House, 2004: 1-5.[5] 徐啸明.列控地面设备[M].北京:中国铁道出版社,2007:25-40.
XU Xiaoming.The wayside equipment for train control[M].Beijing: China Railway Publishing House,2007: 25-40.
[6] 中国铁道科学研究院.欧标应答器技术规格书[R].北京,2011.
China Academy of Railway Sciences.Euro standard transponder technology speciation[R].Beijing, 2011.
[7] 刘宏杰.CBTC系统中列车安全定位方法的研究[D].北京:北京交通大学,2008.
LIU Hongjie.The research of train safe location method in CBTC system[D].Beijing: Beijing Jiaotong University, 2008.
[8] 叶建斌.RFID技术在列车控制系统应用的研究[D].北京:华北电力大学,2008.
YE Jianbin.The research of RFID technology application in train control system[D].Beijing: North China Electric Power University, 2008.
[9] 黄璞.基于大数据的CBTC车载信号智能维护系统研究[J].铁路通信信号工程技术,2016,13(2):64-66.
HUANG Pu.CBTC onboard signal intelligent maintenance system based on big data[J].Railway signalling & communication engineering, 2016, 13(2): 64-66.
[10] 中国城市轨道交通协会.城市轨道交通CBTC信号系统-ATP子系统规范:CZJS/T 0028—2015[S].北京,2015.
China Association of Metros.Urban railway transportation CBTC Signal system-ATP subsystem specification: CZJS/T 0028—2015[S].Beijing, 2015
(编辑:王艳菊)
Application of RFID Technology in CBTC Train Location System
LIU Xiaolei1, HUANG Pu2
(1. Hangzhou metro group Co., Ltd., Hangzhou 310017; 2. Hangzhou MTR Corporation Co., Ltd., Hangzhou 310017)
In the communication-based train control (CBTC) system, the train locating accuracy is the premise for safe and efficient operation, and the train locating technology in view of RFID provides the technical conditions for high accuracy of train locating. In terms of the working principle of RFID technology, the paper introduces the technical indicators and the working principle of RFID railway transponder with different design standards, mainly analyzes three factors influencing the uncertain train location: speed measurement error, wheel diameter error and reactor correcting error, and puts forward the method of eliminating the train location uncertainty by RFID transponder to improve the train locating accuracy. At last, the feasibility of high precision location of RFID technology is verified by the site data. RFID technology can guarantee the train locating accuracy under different train running speeds. The response time of RFID transponder is less than 0.2 second, and the error of train locating is no more than 2% of the measured values, which can meet the auxiliary train locating requirements with CBTC for medium and low operation speeds of rail transit.Keywords: urban rail transit; CBTC; RFID; train locating; train location uncertainty; transponder
10.3969/j.issn.1672-6073.2017.03.021
2017-03-30
2017-04-25
刘小磊,男,硕士,工程师,从事轨道交通信号系统的应用研究,liuxiaolei@hzmetro.com
U231.6
A
1672-6073(2017)03-0107-05
猜你喜欢
铁道机车车辆(2023年5期)2023-11-10 07:08:52
法律方法(2022年2期)2022-10-20 06:41:56
科学与生活(2021年19期)2021-10-30 16:09:00
铁道通信信号(2020年9期)2020-02-06 09:15:22
中国外汇(2019年7期)2019-07-13 05:45:04
铁道学报(2018年5期)2018-06-21 06:21:18
系统工程与电子技术(2016年4期)2016-08-24 07:46:22
铁道通信信号(2016年4期)2016-06-01 12:10:19
城市轨道交通研究(2015年11期)2015-02-27 11:02:50
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:20