双弹簧回转式椰肉椰壳分离机的设计及仿真分析
2017-07-05 14:46蔡宽麒胡祝华刘博艺陈振斌赵瑶池
食品与机械 2017年4期
蔡宽麒 - 胡祝华 - 刘博艺 - 陈振斌 - 赵瑶池 -
(1. 海南大学机电工程学院,海南 海口 570228;2. 海南大学南海海洋资源利用国家重点实验室,海南 海口 570228;3. 海南大学信息科学技术学院,海南 海口 570228)
双弹簧回转式椰肉椰壳分离机的设计及仿真分析
蔡宽麒1CAIKuan-qi1胡祝华2,3HUZhu-hua2,3刘博艺3LIUBo-yi3陈振斌1CHENZhen-bin1赵瑶池3ZHAOYao-chi3
(1. 海南大学机电工程学院,海南 海口 570228;2. 海南大学南海海洋资源利用国家重点实验室,海南 海口 570228;3. 海南大学信息科学技术学院,海南 海口 570228)
依据椰肉与椰壳的厚度和韧性不同的特点,设计了基于单片机控制的新型双弹簧回转式椰肉椰壳分离机器。性能仿真结果表明,该机器工作时的有效面积比达到98.68%,平均每个椰子工作时的误差面积不超过4%;每个椰子的平均处理用时约为12 s,每小时能够处理椰子286个。
椰肉分离;双弹簧回转;刀具设计;主轴传动装置;云模型
椰子是一种典型的热带经济作物,拥有2 000多年的种植历史[1],其胚乳俗名椰肉,椰肉富含蛋白质、碳水化合物,可制成椰干、椰蓉、椰奶粉、椰子汁、椰蛋白及无色椰子油等营养价值高的产品[2-4],其椰壳可制成市场前景广的椰雕或椰壳活性炭等[5-6]。椰肉和椰壳的分离目前仍处于人力或半自动化阶段,椰肉的挖取工作主要依靠人工完成,无法做到一次性将椰肉自动取出,生产效率低、人工成本高,且易发生安全事故[7]。椰肉和椰壳的自动精准分离技术非常关键,目前已知的分离技术尚未达到精准自动分离的程度。目前市面上主流的电动式椰肉和椰壳分离机械是椰子刨丝机,其采用电机驱动刨丝刀旋转对椰肉进行刮取,虽工作效率高,但由于机械工作时需要人员对椰子进行帮扶,并且刨丝刀转速快,危险系数较高。
人工挖取椰肉大部分取决于刀片的设计[8]。例如张敏[9]发明的一种便携式开椰壳刮椰肉刀,其本质是通过刀具头部的尖锥将椰子打碎,刀头体上对称的两片倾斜的波浪形刀片通过刀头体的摆动,使刀片在凹陷的弧形椰肉面上自由刨丝。此便携式开椰壳刮椰肉刀可做到开壳挖肉一体化,但其存在椰壳完整性差、人力消耗大、效率低等问题。再如秦兴春[10]发明的便携式电动椰肉切削装置,其工作原理将刀具插入椰肉根据需要用不同档的电机,刀片旋转,将椰肉逐块割下,该机械小巧而且使用方便,但是该设备仅在一定程度上减少人力消耗,在刀具上加装电动装置会降低作业的安全系数,椰肉挖取的厚度依然需要人力控制,不适合高速、高效流水线式生产。因此,无法做到椰肉挖取的自动化和产业化,其中张敏[9]和秦兴春[10]所设计的机器见图1。
本研究基于胡克定律和单片机研究拟设计一种基于单片机控制的双弹簧回转式椰肉自动精准分离机器,并利用云模型进行仿真试验,旨在增加椰肉分离的自动化、完整性和精准度,提高椰肉挖取的效率及安全性。

图1 结构示意图Figure 1 Structure diagram
1 整机结构和工作原理
1.1 整机结构
双弹簧回转式椰肉椰壳分离机结构示意图见图2,包含下部夹紧座和上部工作刀具,上部工作刀具包括螺纹主轴装置、刀片挖取装置、单片机;下部夹紧座由弹簧组加紧装置和承载装置等部件组成。通过10个参数对整机进行设计,其中夹紧装置外形尺寸的长、宽、高分别为800,800,1 000 mm;工作装置外形尺寸的长、宽、高分别为500,300,600 mm;为了能使整机正常工作,输入动力采用冗余设计:配套动力设计为3 kW,整机的重量为800 kg。该机械的进料方式为人工送料,并且利用夹紧装置卡死,其椰肉取出率大于95%,椰壳完整率大于98%,并且每小时能处理约250个椰子。
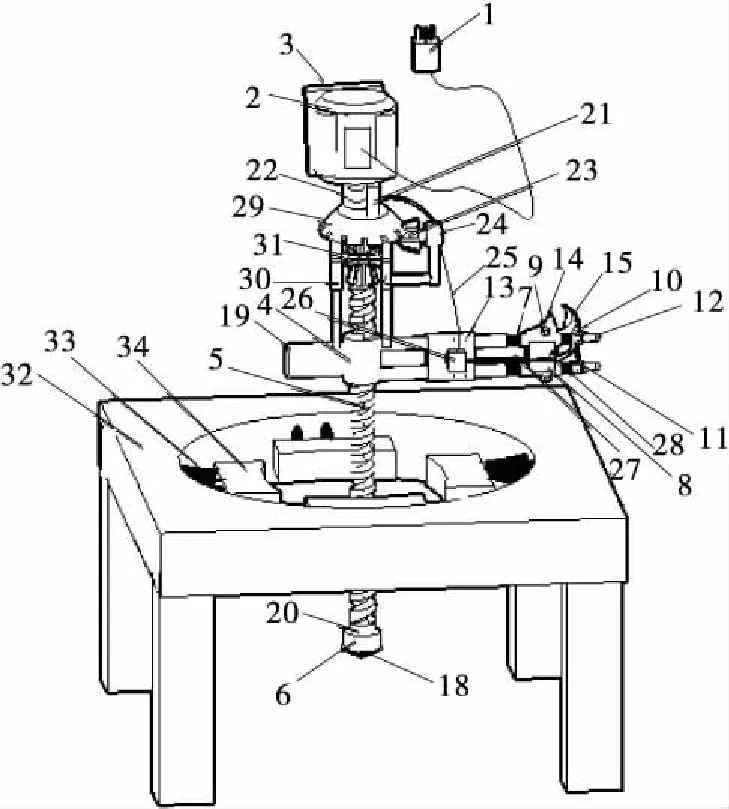
1. 插头 2. 电机 3. 固定板 4. 环套 5. 螺纹主轴 6. 刨丝锥头 7. 弹簧组A 8. 刀片固定板 9. 旋转轴 10. 弹簧组B 11. 钢制小环 12. 圆珠 13. 固定环套 14. 椰肉挡刀 15. 弧形刀片 16. 连杆 17. 刀具承载臂 18. 锥头沟纹 19. 平衡块 20. 压力传感器 21. 单片机 22. 减速器 23. 斜齿轮A 24. 线盒 25. 电线 26. 步进电机 27. 皮带 28. 固定圆柱 29. 伞齿轮 30. 伸缩杆 31. 对心斜齿轮 32. 夹紧底座 33. 弹簧组C 34. 夹紧块 35. 联轴器
图2 机器结构示意图
Figure 2 Structure diagram of machine
1.2 工作原理
将去汁开盖等预处理后的椰子放入夹紧装置中,螺纹主轴伸入椰壳中抵住底部椰肉。电机旋转带动螺纹主轴和刀片的旋转,当红外线传感器检测刀进入椰壳时,步进电机停转,皮带对图2中所示的弹簧组A无拉力,刀具与椰壳贴合,由于椰肉和椰壳的硬度相差甚远,因此钢制小环之后的部分包含圆珠会刺穿椰肉,而不会刺穿椰壳,圆锥底部的小球将会和椰壳进行紧密接触,工作时小球滚动,从而减少锥体与椰壳的阻力。在刀具承载臂进行旋转时弧形刀片斜切入椰肉中,通过旋转对椰壳内的椰肉进行环形切割,椰肉顺着弧形刀口进入,从弧形刀片上的孔洞刮出,当速度过快时,割出的椰条可能不沿孔洞滑出,此时刀具上的椰肉挡刀起引导作用,使椰条顺着弧形刀片滑出。伞齿轮螺纹主轴的转动带动刨丝圆锥转动可将底部椰肉成丝状刨出。当刀具承载臂向下运动接触到刨丝锥头时,压力传感器接收到传来的压力,并将信号传递给单片机由此来控制步进电机正转,步进电机通过皮带拉动固定圆柱,迫使弹簧组A压缩,从而缩短刀具承载臂的半径,使其半径远小于椰壳半径,然后电机开始反转,刀具离开椰子内部方便下一个工作循环的入刀,自此一个工作循环完成。三维的工作流程见图3。

图3 机器的三维工作流程Figure 3 The three-dimensional workflow of the machine
2 关键部分设计和参数分析
2.1 主轴传动装置的设计
主轴传动装置由螺纹主轴、螺纹主轴顶部的斜齿轮和尾部的刨丝锥头组成,见图4。电机将转速通过对心斜齿轮传递到螺纹主轴上时,转速的方向与刀具的运动方向相反,环套内的梯形螺纹与螺纹主轴的螺纹相啮合,通过相对转动达到刀具的上下运动,同时伴随着旋转运动。
为了能使刀具在工作时同时做到横向旋转、纵向位移,因此主轴螺纹的类型设计为梯形螺纹,可实现旋转运动和直线运动的互相转换,并且做到既传递力又传递运动[11],梯形螺纹的牙型分为基本牙型和设计牙型[12]。根据机械运动和减少的生产成本需求,考虑螺纹主轴损坏时易于替换,选用设计牙型,刀具的转速上文已述为nd=2 r/s,为了满足刀具按照螺纹下移到末端时时间不能太长,即螺距不能太宽,在设计时采用国家标准(GB/T 5796.1—2005)设计螺距为P=20 mm,并且满足式(1)~(5)。
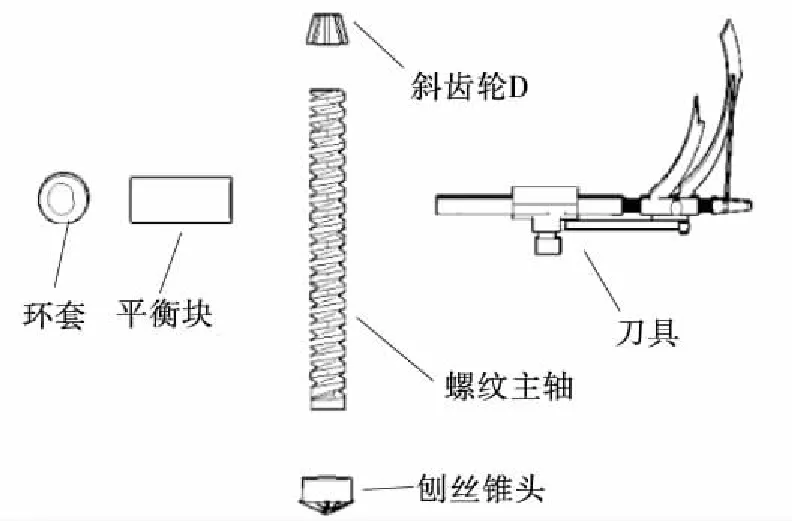
图4 主轴传动装置分解图Figure 4 Exploded view of spindle transmission
D1=d-p,
(1)
D4=d-2Ac,
(2)
d3=d-P-2Ac,
(3)
d2=D2=d-0.5P,
(4)
H4=0.5P+Ac,
(5)
式中:
D4——设计牙型上的内螺纹基本大径,mm;
D2——设计牙型上的内螺纹基本中径,mm;
D1——设计牙型上的内螺纹基本小径,mm;
d——设计牙型上的外螺纹基本大径(公称直径),mm;
d2——设计牙型上的外螺纹基本中径,mm;
d3——设计牙型上的外螺纹基本小径,mm;
P——螺距,mm。
其具体参数见表1。

表1 螺纹参数设计†Table 1 The design of thread parameter mm
† 在外螺纹大径上采用0.4Ac的倒角。
2.2 刀具设计
由于椰子高度半径不同,为了贴合椰子,在挖取椰肉时刀片的角度、力度和刀具承载臂的长度需要不断改变,因此依据弹簧在外力的作用下设计双弹簧式刀具,结构见图5,当椰子半径小时,弹簧受力收缩,当椰子半径大时则弹簧压缩量小,并且弹簧在全过程都处于压缩状态,使得刀具承载臂1的长短可以根据椰子的半径进行自动调整,利用两个活动节(钢制小环和螺栓)来增加刀片的转动幅度,刀片口设计成弧形便于切入椰肉,并和椰内壳相接触,椰子在同一高度时其截面不一定为圆形,当椰子壳到螺纹曲轴的半径改变时双弹簧压缩,刀片向着压缩大的方向移动,刀口依然会紧贴椰壳,连杆起到固定刀片的作用,通过双弹簧装置和活动节实时调整刀的高低,以做到在全程工作中刀都能紧贴椰壳。在刀具承载臂的末端有圆珠装置,在机器工作时钢制小环以下的锥形部分将会刺穿椰肉止于椰壳,圆锥底部的小球将会和椰壳进行紧密接触,工作时小球滚动,从而减少锥体与椰壳的阻力。
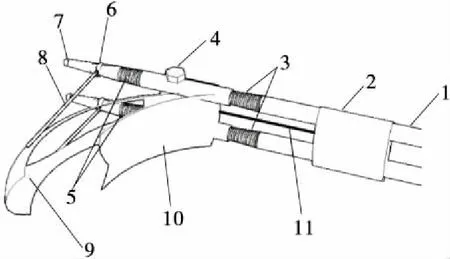
1. 刀具承载臂 2. 固定环套 3. 弹簧组A 4. 旋转轴 5. 弹簧组B 6. 钢制小环 7. 圆珠 8. 连杆 9. 弧形刀具 10. 椰肉挡刀 11. 皮带
图5 刀具三维图
Figure 5 Three-dimensional map of tool
3 电控部分的设计
设计挖椰肉机器的机械器件中各部件的运动都是通过对步进电机的间接操作来实现的。其中,操作系统、运动控制系统是组成步进电机控制系统的关键环节,操作系统把设定的动作转化为电信号传递给运动控制系统,运动控制系统控制机械装置完成规定的动作。
3.1 控制和驱动模块
椰肉分离机的机电控制部分采用的是处理器速度快,功耗小的C8051F系列单片机[13],电机采用的是高精确度步进电机。整机的运动控制系统由控制部分、驱动部分、执行部分组成,见图6。驱动控制部分的组成见图7,主要包括脉冲信号的产生、信号分配、功率放大、步进电机和负载。
3.2 执行模块的动作时序设计与实现
所设计的挖椰肉机器电控部分的时序逻辑见图8。结合图2进行执行过程的阐述:启动时,电机2正转,收卷皮带,从而拉动弹簧压缩,使刀具组整体的长度减小,随后电机1正转,带动刀具旋转下降,同时当红外传感器检测到刀具已经旋转到椰子内部时,电机2反转使皮带不再影响弹簧压缩,弹簧压缩量仅受椰壳半径影响,刀具旋转下降直至环套4与刨丝锥头6上的压力传感器检测的压力值超过阈值时,电机2正转,收卷皮带带动弹簧压缩,使刀具组的长度减小,然后电机2开始反转,刀具离开椰子内部。

图6 步进电机控制系统组成Figure 6 The components of the stepper motor control system
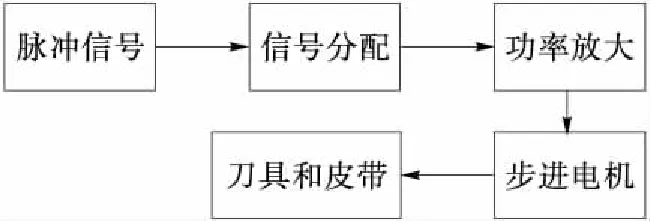
图7 驱动控制系统组成方框图Figure 7 The block diagram of driving control system

图8 电机控制流程图Figure 8 The flow chart of motor controlled
4 仿真试验结果与分析
为了验证和分析本设计挖椰肉机器的机械结构和电控部分的合理性,进行了仿真试验。其中包括刀具的椰肉挖取路径的仿真和分析、所设计机械对单个椰子的挖椰肉参数测试、对单组不同半径的椰子试验、对多组不同半径的椰子试验和误差综合评价。所进行的仿真试验在双核i3处理器(2.5 GHz)下,windows 7操作系统的MATLAB 2010软件中进行。
4.1 刀具的椰肉挖取路径的仿真与分析
机械工作过程中,刀口的椰肉挖取路径呈球面螺旋线状。根据球面螺旋线在球坐标系下的表达式可推出其在笛卡尔坐标系中的表达式为:
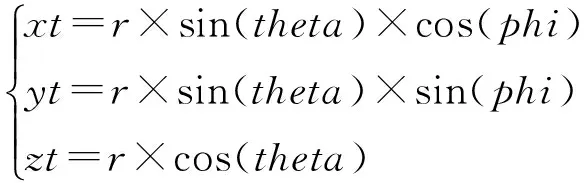
(6)
式中:
r——螺旋线所处球体的半径,mm;
theta——球坐标系中的天顶角,(°);
phi——球坐标系中的方位角,(°);
a——球体半径,mm;
N——螺旋圈数。
则可推得:
l=2a/N,
(7)

(8)

(9)
式中:
l——螺距,mm;
φ——螺旋缠绕的角度,(°);
θ——球坐标系中的天顶角,(°);
S——螺旋线总长,mm。
根据推算得到的球体螺旋线的数学表达式和长度计算公式,对本设计挖椰肉机器的刀具的椰肉挖取过程进行了仿真与分析。
图9为刀具挖椰肉路径的三维仿真情况。图形依次从上至下生成,线路生成方向为俯视顺时针方向,包含了刀具行刀过程中的高度变化,由图9可以看出,其高度是匀速周期性增加和减小的,和理论分析相符。图10为刀具挖椰肉路径的平面变化,由图10可以看出,其路径是半径逐渐增加的圆形路线。
之后,对所设计的机械结构在横向、纵向位置变化的试验结果进行了分析。图11和图12分别是刀具在横向和纵向的位置变化情况,可知其运行轨迹是平稳的,与理论分析相符。
4.2 单个椰子的挖椰肉参数的仿真测试
针对单个椰子的挖椰肉参数测试,首先设椰子的半径为10 cm,根据上文对球形螺旋线的公式总结和分析,加入刀口宽度和旋转圈数的参数因素,得到的结果见图13。
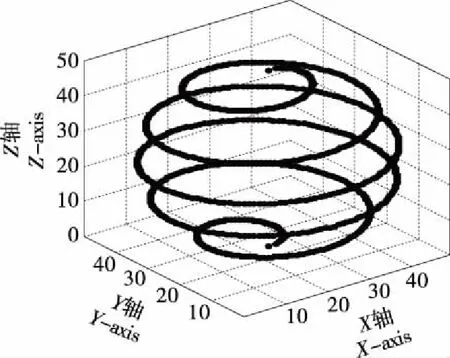
图9 刀具的刀口椰肉挖取路径仿真Figure 9 Coconut meat digging path simulation of tool

图10 椰肉挖取平面路径Figure 10 Flat path of coconut digging

图11 刀具的横向位置变化Figure 11 Transverse position change of the tool

图12 刀具的纵向位置变化Figure 12 The longitudinal position change of the tool
图14为刀口宽度分别为1,3,5,7,10 mm时刀具承载臂旋转圈数、误差面积和刀口宽度之间的数据关系。由图14可以看出,在刀口宽度保持不变的情况下,误差面积随着旋转圈数增加呈现先减小后增大;在旋转圈数不变的情况下,当刀口宽度较大时,误差越大,反之误差越小。由此可知,随刀口宽度的减小和在一定范围内旋转圈数的增加,误差会呈现逐渐减小的趋势。
4.3 单组椰子的挖椰肉试验
根据实际的机械生产标准和对准确率的要求,设定螺纹主轴的螺距为4 mm,刀具的刀口宽度为5 mm。按照此设计,进行了单组不同半径的机械仿真试验。根据调查,成熟青椰子的直径主要在10 cm左右。因此,首先生成直径期望为10 cm,呈正态分布的100个椰子直径的数据,然后将其代入所设计的机械仿真试验模型中进行试验,输出试验误差,最后将试验结果可视化输出,见图15。由图15可知,误差面积随椰子直径的增加而增加,同时误差面积主要保持在7 cm2之内。随后,对试验结果中,机器误差面积和相对应的数量分布情况进行了统计分析,分析结果表明,试验结果的误差分布呈正态分布,分布的期望是4 cm2,见图16。

图13 单个椰子的椰肉挖取试验中椰肉挖取面积误差、 刀口宽度和螺距关系图
Figure 13 Coconut meat digging area error, blade width and pitch relationship in coconut digging experiment of single coconut

图14 刀具承载臂旋转圈数、误差面积和刀口宽度 之间的关系图
Figure 14 The number revolutions of the tool carrier arm, the error area, and the width of the knife edge
其中已知条件是电动机的转速为630 r/min,刀口长度为5 mm,螺距为4 mm。表2是机器误差面积和相对应的数量分布的正态分布拟合结果。
采用5个指标对单组椰子进行挖取椰肉的仿真试验,试验结果表明:平均每个椰子的椰肉挖取用时为12.581 s,消耗能量约为0.119 W,其中每个椰子的椰肉挖取有效面积为309.85 cm2,所求出的有效面积比98.68%,并且该机械每小时可以处理椰子数量为286个。
由表2中的试验数据结果表明,在单组不同半径的挖椰肉试验中,挖椰肉机器工作时的有效面积比能够达到98.68%以上(试验中忽略了刨丝锥头挖取的椰肉面积),超过了95%的预定目标。

图15 单组椰子的直径与其对应误差的试验数据Figure 15 Experimental data of the diameter of single group of coconut and its corresponding error

图16 单机器误差的数量分布和正态分布拟合结果Figure 16 The number of single-machine error distribution and normal distribution表2 误差面积和相对应的数量分布的正态分布拟合结果
Table 2 Error area and the corresponding distribution of the normal distribution of the number of fitting results

残差平方和相关系数自由度调整的相关系数剩余标准差2814.60.9431450.988712.3859
4.4 多组椰子的挖椰肉试验与误差综合评价
在实际工作过程中,不同地区的椰子生长和发育状况可能不同,椰子半径分布会有一些差异,为体现这一情况,使试验与实际情况更加相符,进行了多组椰子的挖椰肉试验并对结果进行了误差综合评价。试验过程中,利用云模型发生器,以云模型所生成的“云滴”的横坐标作为椰子的直径,以“云滴”的纵坐标的整数倍作为该半径下椰子的数量,每个“云滴”作为试验中的一组椰子,其中,“云滴”的生成步骤为:
Step 1:生成正态随机数xi(期望值为Ex,方差为En);
Step 2:生成正态随机数En′(期望值为En, 方差为He);
Step4:令(xi,yi)为一个云滴;
Step5:重复Step1~Step4,直到产生足够多的云滴数。
图17为仿真试验中通过云发生器产生的椰子的半径及相对应的数量情况。图18为多组椰子的挖椰肉试验的误差结果情况。
图17 云发生器产生的椰子的半径及相对应的数量
Figure17Theradiusofthecoconutproducedbythecloudgeneratorandthecorrespondingquantity
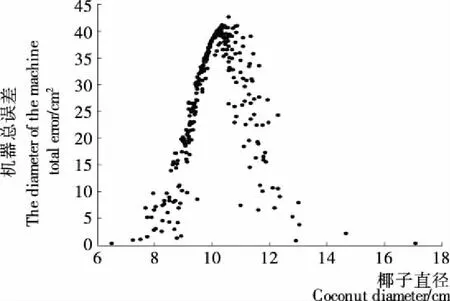
图18 多组椰子挖椰肉试验的误差结果Figure 18 The results of multiple groups of coconut test error results
表3为多组椰子的挖椰肉试验结果的具体数据,其中已知条件是电动机的转速630 r/min,刀口长度5 mm,螺距4 mm。
由表3可知,在对300个椰子进行仿真试验过程中,各个直径及其相对应数量组别的试验组总误差不超过45 cm2。平均每只椰子的误差不超过4.5 cm2,误差面积不超过4%。多组椰子的仿真试验结果证明,所设计的挖椰肉机器精确度较高,具有可行性和实用性。
5 结论
针对如今市场上自动化椰子取肉技术不完善,导致取肉过程中破损率高,椰壳无法进行后续加工等问题,创新性地设计了一款基于单片机控制双弹簧回转式椰肉椰壳分离机器。本试验是基于机械设计方法并结合单片机精确控制来完成整机设计的,运动控制系统控制螺旋主轴上的刀具承载臂正反转,从而带动刀具沿着椰壳壁挖取椰肉。对300组椰子进行仿真试验,试验结果表明:设计的挖椰肉机器精确度较高,可行性和实用价值理想。该机械增加了挖椰肉的自动化程度,在解决人力消耗大,事故风险大等问题的同时,还能高效率地进行椰肉椰壳的精准分离,保证了椰壳的完整性,使得椰子利用率大幅度提高。

表3 多组椰子的挖椰肉试验结果Table 3 Experimental results of coconut dredging in groups of coconuts
[1] APPAIAH P, SUNIL L, KUMAR P K P, et al. Composition of Coconut Testa, Coconut Kernel and its Oil[J]. Journal of Oil & Fat Industries, 2014, 91(6): 917-924.
[2] 张志强, 樊军庆, 王涛. 椰子剥衣机的设计[J]. 食品与机械, 2015, 31(3): 122-124.
[3] 郑亚军, 李艳, 唐敏敏, 等. 椰子可溶性膳食纤维提取工艺的研究[J]. 热带作物学报, 2011, 22(2): 540-542.
[4] 张浩栋, 张燕, 梁栋. 椰子滚切式剥衣机的设计[J]. 食品与机械, 2013, 29(1): 167-169.
[5] CHEN Yong, ZHOU Liu-Jiang, HONG Yun-Zhen, et al. Preparation of high-surface-area activated carbon from coconut shell fibers[J]. Carbon, 2010, 48(10): 2 005.
[6] 杨坤彬, 彭金辉, 张利波, 等. 升温速率对椰壳热解特性的影响及动力学分析[J]. 农业工程学报, 2009, 25(8): 226-220.
[7] 周开欢, 张燕. 转盘式椰壳打孔取汁机的设计[J]. 食品与机械, 2014, 30(4): 96-98.
[8] JAMES J, JOY J, SHAJI A, et al. Design and Fabrication of Coconut Breaker Extractor Grater Machine[J]. International Journal for Innovative Research in Science and Technology, 2016, 2(11): 179-184.
[9] 张敏. 一种便携式开椰壳刮椰肉刀: 中国, 201110269786.3[P]. 2012-02-22.
[10] 秦兴春. 便携式电动椰肉切削装置: 中国, 201073218[P]. 2008-06-18.
[11] 贾洪雷, 王文君, 庄健, 等. 仿形弹性镇压辊设计与试验[J]. 农业机械学报, 2015, 46(6): 28-34.
[12] 闫华军, 刘晋平, 胡正寰, 等. 楔横轧梯形螺纹轴成形机理[J]. 北京科技大学学报, 2012, 34(6): 701-706.
[13] 张媛媛, 罗益民, 邵铃. 基于C8051F单片机的智能电导率分析仪的研制[J]. 仪表技术与传感器, 2015(4): 33-35.
Design and simulation analysis of coconut and coconut shell separator based on double spring rotary
(1.MechanicalandElectricalEngineeringCollege,HainanUniversity,Haikou,Hainan570228,China; 2.StateKeyLaboratoryofMarineResourceUtilizationinSouthChinaSea,HainanUniversity,Haikou,Hainan570228,China;3.CollegeofInformationScience&Technology,HainanUniversity,Haikou,Hainan570228,China)
According to the different characteristics of the thickness and toughness between the coconut and coconut shell, a new double spring rotary separation machine for the coconut and coconut shell was designed based on single chip microcomputer. The simulation results showed that the machine worked at an effective area ratio of 98.68%, the average error area of each coconut was not more than 4%. In addition, the average processing time for each coconut was 12 seconds, and 286 coconuts could be processed per hour.
coconut separation; single chip microcomputer control; double spring rotation; tooling layout; main shaft driving apparatus
10.13652/j.issn.1003-5788.2017.04.019
猜你喜欢
洁净煤技术(2021年2期)2021-04-08
小聪仔(科普版)(2020年7期)2020-11-24
海南大学学报(自然科学版)(2020年3期)2020-10-21
小学生学习指导(低年级)(2020年6期)2020-07-25
小聪仔(科普版)(2020年7期)2020-02-01
小聪仔(科普版)(2020年7期)2020-02-01
养生保健指南(2017年12期)2017-12-07
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年3期)2017-06-23
数学小灵通·3-4年级(2017年4期)2017-05-04