
基于北斗的动车组实时高精度定位系统研究与应用
2017-07-05 15:23张晓钧崔洪州袁圣勇
测绘通报 2017年6期
张晓钧,崔洪州,袁圣勇
(通号通信信息集团有限公司,上海 200070)
基于北斗的动车组实时高精度定位系统研究与应用
张晓钧,崔洪州,袁圣勇
(通号通信信息集团有限公司,上海 200070)
北斗卫星导航系统(BDS)已向亚太区域提供正式服务并开始建设北斗全球系统。为了评估验证北斗系统在高速移动条件下的实时差分定位精度,本文设计了动车组实时高精度定位系统并建设了高速铁路试验段。实测结果表明,高速移动条件下动车组列车实时定位的水平垂直轨道方向精度优于1 m,具备区分清楚动车组列车所处轨道的能力,一定程度上能满足铁路行业定位应用的迫切需求。
北斗卫星导航系统;动车组列车;高精度;实时差分;高速移动
北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)是我国正在实施的自主研发运营、具有自主知识产权的卫星导航系统,是继GPS、GLONASS之后第3个面向全球覆盖的卫星导航系统[1-2]。2012年12月27日,北斗卫星导航系统开始向亚太大部分地区正式提供连续无源定位、导航、授时等服务[3]。2015年3月30日,首颗新一代北斗导航卫星的成功发射标志着我国北斗卫星导航系统由区域运行向全球拓展的启动实施。对北斗导航定位性能的评估结果表明北斗系统的定位精度与GPS处在同一水平[4-7],证明北斗卫星导航系统已经具备我国范围内的高精度定位能力。对于10 km以内的基线,目前北斗卫星导航系统的相对定位精度在3 cm左右,整体结果达到厘米级精度,能够满足测绘、交通等领域的应用[8]。
高精度卫星定位在铁路领域的应用主要集中在铁路勘测、沉降监测、轨检等静态或者低速运动的场景,且以GPS为主[9-10]。铁路行业基于北斗系统的高精度定位应用尚处于起步阶段[11-13],应用于高速移动场景的实时高精度卫星定位鲜有报道。高速铁路系统具备运行速度快、发车间隔小、行车密度高、客运量大等特点,在诸多保证高铁线路高安全、高可靠运营的参数或信息中,实时、准确的动车组列车物理位置信息是列车运行控制、调度指挥各系统所需的关键性基础信息之一。准确、及时地获取高精度的动车组列车位置信息,是保证行车安全、发挥速度优势、提供品质服务的前提。
1 动车组实时高精度定位系统设计
基于北斗的动车组实时高精度定位系统分为地面子系统和车载子系统两大部分。列车自主定位由车载子系统实时差分解算完成,地面子系统为车载子系统提供差分数据以实现实时高精度定位。列车车载设备与地面设备间通过3G/4G网络建立无线通信链路,进行数据交换。系统结构如图1所示。

图1 基于北斗的动车组高精度定位系统结构
1.1 车载子系统
车载子系统是动车组列车自主定位的核心设备。车载子系统主要由车载主控计算机、车载卫星定位单元、车载高精度天线、车载3G/4G无线通信设备及天线及人机界面等组成。车载卫星定位单元通过高精度天线接收卫星信号并结合地面子系统提供的差分信息进行高精度定位的解算,输出高精度定位解算结果;车载主控计算机处理各功能单元间的数据交互,从地面服务器获取相应差分数据后提供给车载卫星定位单元,并将高精度定位解算结果汇报给地面服务器,从地面服务器获取一定范围内其他列车的精确位置,并在人机界面的地图上标定。
1.2 地面子系统
地面子系统辅助动车组列车进行高精度定位,同时也是系统数据的处理中心。地面子系统主要由北斗地基增强子系统、数据处理中心、专用光纤通信网络、3G/4G通信设备及其他辅助设备组成。北斗地基增强子系统由差分基准站、控制与数据中心、播发服务等组成。差分基准站一般设置在车站或沿线通信机房,其位置坐标精确测定,负责接收卫星信号,并将载波相位观测数据发给控制与数据中心;控制与数据中心根据基准站传输的载波相位观测数据解算并生成差分信息,通过播发服务向动车组列车提供相应的差分数据。地面子系统数据处理中心接收、存储并分发动车组列车精确定位信息。
2 高速铁路试验段建设
为了验证高速移动场景下基于北斗的动车组高精度定位系统的性能,在设计时速350 km/h的城际铁路沿线建设了高速铁路试验段。
(1) 北斗地基增强子系统试验网[14]由2个基准站和1个系统控制与数据中心组成。依托城际铁路沿线通信机房,利用CGCS2000坐标系下的B级控制点建设了2个基准站,两站之间直线距离约22 km。控制与数据中心设在铁路局机房,与基准站之间通过专用光纤通信链接,负责解算和对外播发差分数据,差分数据遵循RTCM 3.x标准。地面子系统数据处理中心部署在铁路局机房,配置有通信服务器、数据库服务器、存储服务器、GIS服务器和应用服务器等。
(2) 试验列车为1列CRH3C型高速动车组,最高运行速度可达350 km/h。高精度定位天线和通信天线安装在车顶中心线上的天线底座上,如图2所示。其余车载设备安装在车厢内机柜内。

图2 车顶天线(左为高精度定位天线,右为通信天线)
(3) 获取正线轨道中心线坐标。选择一段约3 km的平直正线区段作为验证高速移动条件下北斗定位精度的参考。选择平直正线区段的优势:①便于获取轨道中心线坐标;②高精度定位天线在轨道面的投影与轨道中心线重合,也就是说理想状况下的定位坐标应该落在轨道中心线上。
首先在现场采集多个控制点对高精度航拍影像进行校准,然后通过轨间距和线间距的约束条件获得轨道中心线坐标,如图3所示(图中的点分别是列车上下行车次的实时定位)。

图3 参考正线轨道中心线
3 数据采集与分析
3.1 数据采集
车载卫星定位单元的RTK定位数据更新率设为5 Hz,获取差分数据的频率设为1 Hz,向数据处理中心数据库上报的频率也设为5 Hz。
为期一个月的数据采集时间内,共计有226个车次以高速通过上述参考线路区段,其中下行121个车次,上行105个车次,采集下行车次坐标数据19 245条,上行车次坐标数据17 023条,共计坐标数据36 268条。
3.2 数据处理与分析
采集的36 268条坐标数据中,固定解占98.33%,浮动解占1.34%,伪距差分解占0.22%,单点定位占0.11%。
众所周知,差分支持下的解算结果通常明显优于普通单点解算结果。对于动车组列车在高速移动场景下的定位应用来说,列车每秒移动可达80多米,因此沿铁轨方向的定位精度优于普通单点定位,不会对应用产生较明显影响,而水平垂直轨道方向的定位误差则会对列车所在轨道的判断产生直接影响,因此系统主要关注水平垂直轨道方向的定位误差。
利用ArcGIS Runtime SDK的GeometryEngine模块计算列车定位坐标数据到轨道中心线的距离作为水平垂直轨道方向的误差。
计算结果显示,在下行方向上,99.77%的水平垂直轨道方向误差小于1 m,99.65%的水平垂直轨道方向误差小于0.5 m,平均水平垂直轨道方向误差0.152 m,最大水平垂直轨道方向误差2.221 m,最小水平垂直轨道方向误差0 m;在上行方向上,99.98%的水平垂直轨道方向误差小于1 m,99.52%的水平垂直轨道方向误差小于0.5 m,平均水平垂直轨道方向误差0.158 m,最大水平垂直轨道方向误差1.167 m,最小水平垂直轨道方向误差0 m。水平垂直轨道方向误差的频率分布如图4所示。
从时间分布(即车次)来看,上下行均有个别车次的水平垂直轨道方向误差较大。其原因是定位未能实现RTK差分解算,搜星质量较差或未接收到差分数据是常见的原因。水平垂直轨道方向误差的时间分布如图5所示。
计算结果显示,高速移动条件下的水平垂直轨道方向误差比静态条件下大,主要集中在0~0.5 m范围内,当速度从265 km/h增加到300 km/h以上时,水平垂直轨道方向误差的分布并没有明显的改变。水平垂直轨道方向误差的速度分布如图6所示。
4 应用分析
定位精度是动车组列车卫星定位性能的重要指标之一。动车组列车定位可沿铁轨方向分为沿轨道方向和水平垂直轨道方向。沿轨道方向上,应能区分清楚同一轨道上运行的前后两列列车,通常小于目前用于列车定位的轨道电路长度即可,而轨道电路一般长数百米到几千米,那么沿轨道方向上的定位精度能优于100 m即可,北斗卫星导航系统的常规定位性能已能满足这一定位精度需求;水平垂直轨道方向上,应能区分清楚列车所处的轨道,这主要取决于铁路相邻轨道的最小线间距。按照我国铁路相关规定[15]的要求,铁路区间双线、站内正线的线间最小距离见表1。

图4 水平垂直轨道方向误差的频率分布
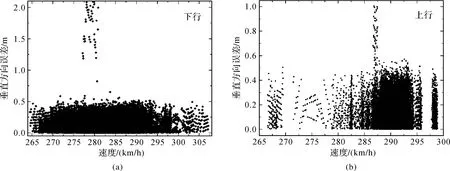
图6 水平垂直轨道方向误差的速度分布
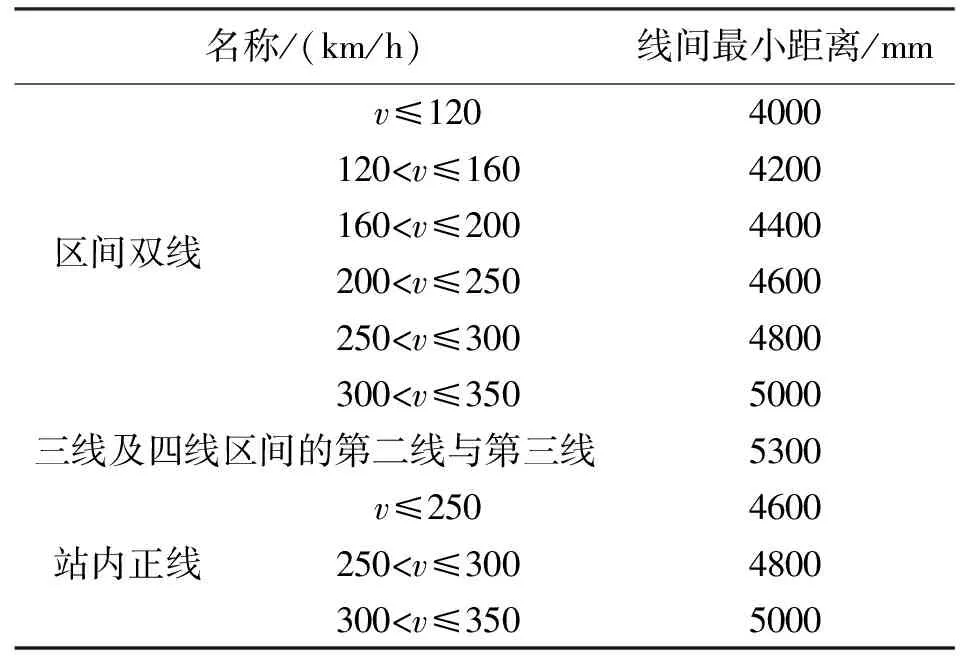
名称/(km/h)线间最小距离/mm区间双线v≤1204000120 以最小的线间距离4000 mm计算,要将列车所处轨道区分清楚的水平垂直轨道方向误差应小于2 m,一般应尽量控制在1 m以内。 欧洲于2000年提出的干线和站内轨道用于列控系统的列车卫星定位水平精度指标是1 m。2014年发布的美国联邦无线电导航计划对用于列车运行控制的卫星定位精度指标也是1 m[16]。 结合实测结果分析,基于北斗的动车组实时高精度定位系统在水平精度方面明显优于青藏铁路ITCS系统3~5 m的定位精度[16],具备满足包括列控系统在内的多种应用对于卫星定位精度需求的能力。 试验结果表明,在时速约300 km/h的高速移动条件下,综合考虑轨道中心线测定等误差后,动车组列车实时定位水平垂直轨道方向误差能小于1 m,并且高度集中在0~0.5 m范围内,具备了区分清楚动车组列车所处轨道的能力,证明系统实现了在该场景下的动车组列车实时高精度定位,且水平垂直轨道方向精度达到了分米级,一定程度上满足了铁路行业定位应用的迫切需求。 对于铁路行业定位应用的各种复杂场景而言,单一的卫星定位面临着诸如桥隧或车站顶棚对信号的遮挡、多径效应、信号干扰、失锁等一些制约因素,需要引入惯导、光纤陀螺、里程计等各种类传感器及其技术,通过多传感器组合融合来提升卫星定位的实际应用性能,这样才能为铁路行业定位应用提供精确、可靠、连续、可用、完好的定位信息。 随着我国自主建设、独立运营的北斗卫星导航系统逐步建设与性能完善,基于北斗卫星导航系统并融合多传感器的列车定位技术将是铁路行业定位技术的重要研究方向,有望迎来广阔的应用推广前景。 [1] 党亚民,秘金钟,成英燕.全球导航卫星系统原理与应用[M].北京: 测绘出版社,2007: 83-87. [2] 杨元喜.北斗卫星导航系统的进展、贡献与挑战[J].测绘学报,2010,39(1):1-6. [3] 国务院新闻办公室.中国北斗卫星导航系统(白皮书)[R]. 北京:[s.n.],2016. [4] 杨元喜,李金龙,王爱兵,等.北斗区域卫星导航系统基本导航定位性能初步评估[J].中国科学(地球科学),2014,44(1):72-81. [5] 唐卫明,邓辰龙,高丽峰.北斗单历元基线解算算法研究及初步结果[J].武汉大学学报(信息科学版),2013,38(8):897-901. [6] 曾琪,何俊.北斗区域导航定位精度分析[J].测绘通报,2015(11):15-19. [7] 刘艳国,秘金钟,李得海,等.BDS 基线解算不同时段精度差异分析[J].测绘通报,2016(6):1-5. [8] 白征东,元荣,过静珺,等.北斗二代卫星厘米级相对定位[J].测绘通报,2014(7):11-13. [9] 王斌,金立新,魏庆朝.GPS技术在铁路定测放线中的应用[J].测绘通报,2006(4):45-47. [10] 张训虎,章磊,王晓奇.基于GPS的高速铁路沉降观测可行性研究[J].测绘通报,2014(10):92-94. [11] 梁永.北斗导航卫星系统在高速铁路精密控制测量中应用研究及精度分析[J].铁道勘察,2015(5):1-4. [12] 魏好,梁永.北斗RTK在铁路勘测中应用研究及精度分析[J].铁道勘察,2015(5):22-24. [13] 本刊编辑部.南方北斗助力丝绸之路两战略汇中原迎机遇[J].测绘通报,2014(10):100. [14] 袁宝文.高速铁路北斗地基增强系统试验网建设[J]. 铁道通信信号,2015(11):55-57. [15] 中国铁路总公司.铁路技术管理规程:TG/01—2014[S]. 北京:中国铁道出版社,2014. [16] 刘江,蔡伯根,王剑.卫星导航在铁路列车控制领域的应用及发展[J].导航天地,2016(10):66-71. Research and Application of Real-time High-precision Positioning System for High-speed EMU Based on BeiDou) ZHANG Xiaojun,CUI Hongzhou,YUAN Shengyong) (CRSC Communication & Information Group Company Ltd., Shanghai 200070,China) BeiDou navigation satellite system has possessed formal services for the Asia-Pacific region and begun the construction of BeiDou’s global satellite navigation system. For evaluating the real-time differential positioning accuracy of BDS under the high-speed moving conditions, a real-time high-precision positioning system is designed for EMU trains and a high-speed railway test section is constructed. The field testing results show that the real-time positioning accuracy in vertical track direction on level can be better than 1 m under the condition of EMU train high speed moving which indicates that the system has the ability to clearly distinguish the track of the EMU train. To a certain extent, the system can meet some urgent needs of the positioning applications in railway industry. BDS; high-speed EMU; high-precision; real-time difference; high-speed moving 张晓钧,崔洪州,袁圣勇.基于北斗的动车组实时高精度定位系统研究与应用[J].测绘通报,2017(6):77-81. 10.13474/j.cnki.11-2246.2017.0194. 2016-12-29; 2017-02-16 中国铁路通信信号股份有限公司重大科研课题(2014J03) 张晓钧(1983—),男,博士,主要研究方向为铁路物联网。E-mail:zhangxiaojun@crscic.com P228 A 0494-0911(2017)06-0077-055 结论与展望
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
铁道通信信号(2020年3期)2020-09-21
海峡姐妹(2020年2期)2020-03-03
伙伴(2020年1期)2020-02-14
铁道通信信号(2018年11期)2019-01-19
铁道通信信号(2018年8期)2018-11-10
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
铁道通信信号(2018年1期)2018-06-06
