
基于多模型专家PID控制的飞机液冷车温控系统建模与仿真
2017-07-05 14:07:55雷金果张永亮
装甲兵工程学院学报 2017年3期
李 旭, 雷金果, 张永亮
(空军勤务学院航空四站系, 江苏 徐州 221000)
基于多模型专家PID控制的飞机液冷车温控系统建模与仿真
李 旭, 雷金果, 张永亮
(空军勤务学院航空四站系, 江苏 徐州 221000)
针对常规PID控制难以满足模型不精确、工作环境复杂的非线性时变飞机液冷车温控系统要求的问题,提出了飞机液冷车多模型专家PID温度控制方法。根据飞机保障需求和液冷车工况的不同,分别建立了制冷工况和制热工况下2种数学模型,设计了多模型专家PID温控系统,并利用Simulink软件进行了仿真研究。仿真结果表明:与常规PID控制和仅针对制冷工况的单模型专家PID控制相比,多模型专家PID控制能更有效地提高飞机液冷车温控系统的瞬态响应速度,并改善其稳态精度和抗干扰性,具有良好的应用前景。
温度控制; 专家PID控制; 飞机液冷车; 仿真
飞机液冷车是在飞机环境控制液冷系统停止工作的状态下,用于控制飞机电子设备工作环境温度的飞机地面环境控制保障装备[1]。实现飞机液冷车温度控制系统(以下简称“温控系统”)的最优化,既能保证飞机电子设备舱的正常工作、提高工作效率,又能降低设备故障率、延长使用寿命,对航空、国防事业的建设发展具有重大意义。目前,我国飞机液冷车温控系统主要采取常规PID控制方式[2]。但对于时变、大滞后、非线性的飞机液冷车温控系统,常规PID控制方式的控制效果并不理想,存在响应速度慢、稳态控制精度低和超调量较大等问题。此外,在研究温控系统时往往只考虑制冷工况,导致当飞机液冷车处于制热工况时,温控系统仍然按照制冷工况建立的模型进行控制,控制效果更差。
专家控制是通过模拟专家的推理过程和知识储备,利用专家的知识来解决问题的一种控制方式[3],与常规PID控制相比,专家控制具备灵巧的在线处理和控制决策、多样化的模型描述以及智能化的问题处理能力。专家控制与常规PID控制相结合可构成专家PID控制,该控制方式能根据内部的专家知识库在线调整PID控制的各项参数,达到缩短控制响应时间、提高控制精度的目的。因此,笔者依据飞机保障需求和飞机液冷车工况,建立制冷工况和制热工况下2种不同的数学模型,将专家控制与PID控制2种控制方法相结合,设计了多模型专家PID温控系统,并利用Simulink对常规PID控制、仅针对制冷工况的单模型专家PID控制和多模型专家PID控制下的飞机液冷车温控系统进行了仿真对比分析。
1 数学模型的建立
飞机液冷车工作流程[1]如图1所示。飞机液冷车温控系统由膨胀水箱、液体泵、液冷机组、电加热器和过滤器等构成,其主要工作系统为液冷系统和电加热系统。根据飞机保障要求,飞机液冷车应当具备制冷降温和制热升温2种保障能力。当飞机需要制冷降温保障时,冷却液先进入液冷机组散热降温,之后进入电加热器进行进一步的温度调节;当飞机需要制热升温保障时,液冷机组不工作,冷却液在电加热器内部吸热升温。飞机液冷车内液体泵、膨胀水箱和过滤器等设备对流过的乙二醇水溶液温度的影响很小,可忽略不计。因此,在建立飞机液冷车数学模型时,取其传递函数均为
G0(s)=1。
(1)
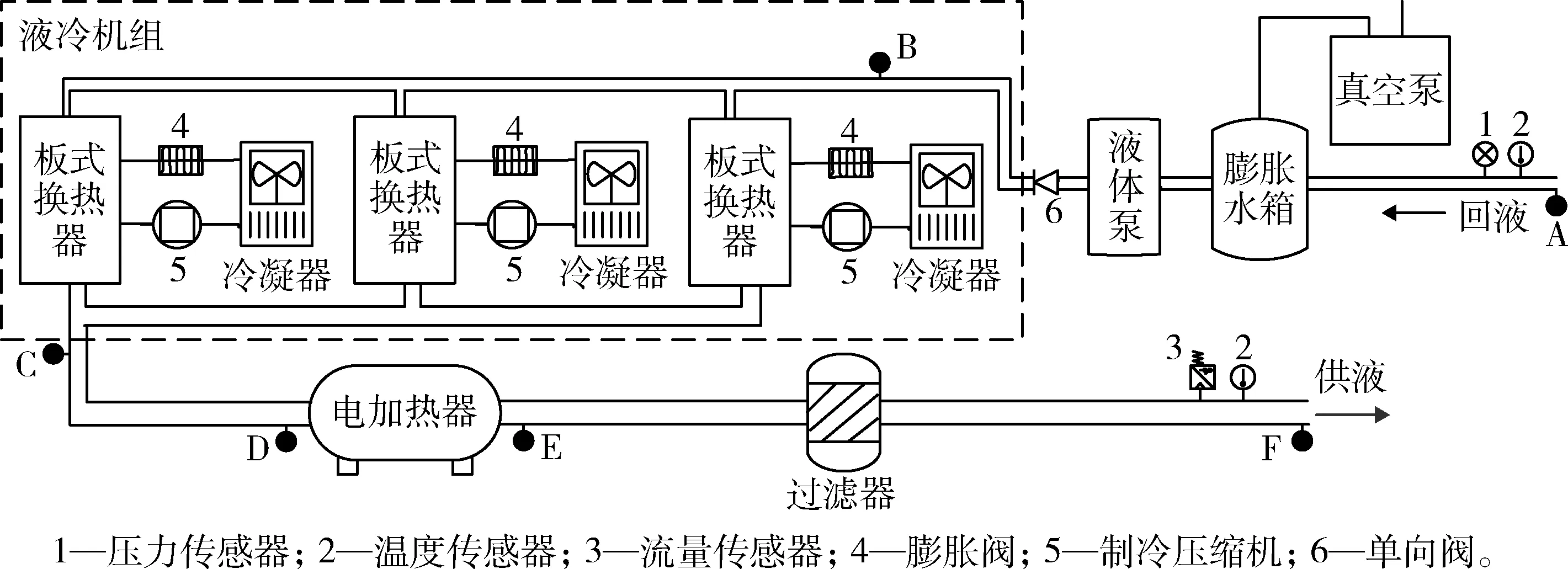
图1 飞机液冷车工作流程
1.1 液冷系统数学模型
飞机液冷车液冷系统分为制冷降温和制热升温2种工况。
1.1.1 制冷工况
选取液冷介质于点B(换热器入口)处的温度TB为输入量,点C(换热器出口)处的温度TC为输出量,根据板式换热器换热量计算公式Qh=KAΔTm[3]和据能量守恒定律可知

(2)
式中:C为板式换热器内液冷介质的热容;M为质量流量;CP为定压比热容;K为板式换热器的换热系数;A为换热面积;ΔTm为平均传热温差。
由文献[4],取 ΔTm=(TB+TC)/2-T0,其中T0为制冷剂蒸发温度。因此,式(2)可转化为
(3)
则TB与TC传递函数的近似表达式为
G1(s)=(MCP-KA/2)/(Cs+KA/2)。
(4)
1.1.2 制热工况
在制热工况下,飞机液冷车上的液冷机组不工作,因此,TB与TC传递函数的近似表达式为
G1(s)=1。
(5)
1.2 电加热系统数学模型
飞机液冷车电加热器内部工况如图2所示。设液冷介质于点D(电加热器入口)处的温度为TD,热量为QD;点E(电加热器出口)处的温度为TE,热量为QE;液冷介质在进出电加热器时间Δt内电加热器的制热量为Q,长为L;向外界环境传出(或由外界传入)的热量为QW,外界环境温度为TW。
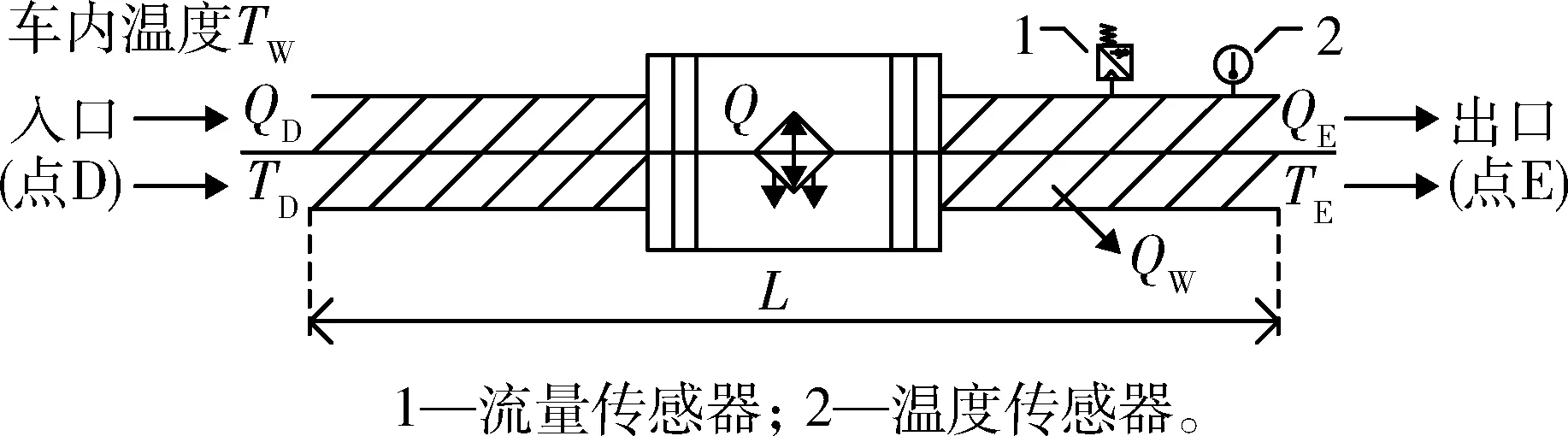
图2 飞机液冷车电加热器内部工况
由能量守恒定律可知
QD+Q-QW=QE。
(6)
可得
QE-QD=Crρπ(Dn/2)2L(TE-TD);
(7)
因为
可得
Q=Pρπ(Dn/2)2L/M;
(8)
因为
可得
(9)
式中:Cr为电加热器内液冷介质的比热容;m4为液冷介质质量;ρ为溶液密度;Dn、Dw分别为电加热器内径和外径;P为电加热器制热功率;hn、hw分别为电加热器内表面与液冷介质和外表面与空气的热交换系数;λ为电加热器围护结构的导热系数。
联立式(6)-(9),令
整理后,求导并化简可得TD和TE的微分关系式为
钱海燕小时候跟着外婆长大,和外婆的感情特别好。她一时还没法面对这样的生离死别。母亲说:“燕燕,你回来见外婆最后一面吧。”

(10)
因此,TD与TE传递函数的近似表达式为
G2(s)=1/[(CrρπDn2L/Y)s+1]。
(11)
1.3 飞机液冷车温控系统数学模型
由于液冷系统和电加热系统都是典型的大时滞系统,飞机液冷车温控系统存在纯滞后时间常数t。因此,飞机液冷车温控系统的数学模型为
G(s)=G0(s)G1(s)G2(s)e-ts。
(12)
[2-6]并加以计算,可得参数值如下:Cr=3 106 J/(kg·℃),CP=4 174 J/(kg·℃),C=58.6 J/℃,ρ=1 097 kg/m3,A=2.25 m2,K=6 000 W/(m2·℃),M=2.75 kg/s,L=1 m,Dn=0.3 m,Y=0.087 m2·℃/W。因此,飞机液冷车内液冷介质温度变化传递函数的近似表达式为
(13)
式中:u=0,1,分别表示飞机液冷车制热、制冷工况。
2 温控系统专家PID控制算法
2.1 专家PID控制算法设计思路
笔者采用专家控制和PID控制相结合的方式,设计了温控系统专家PID控制器,以提高温控系统控制的精度。专家PID控制器的结构[7]如图3所示。
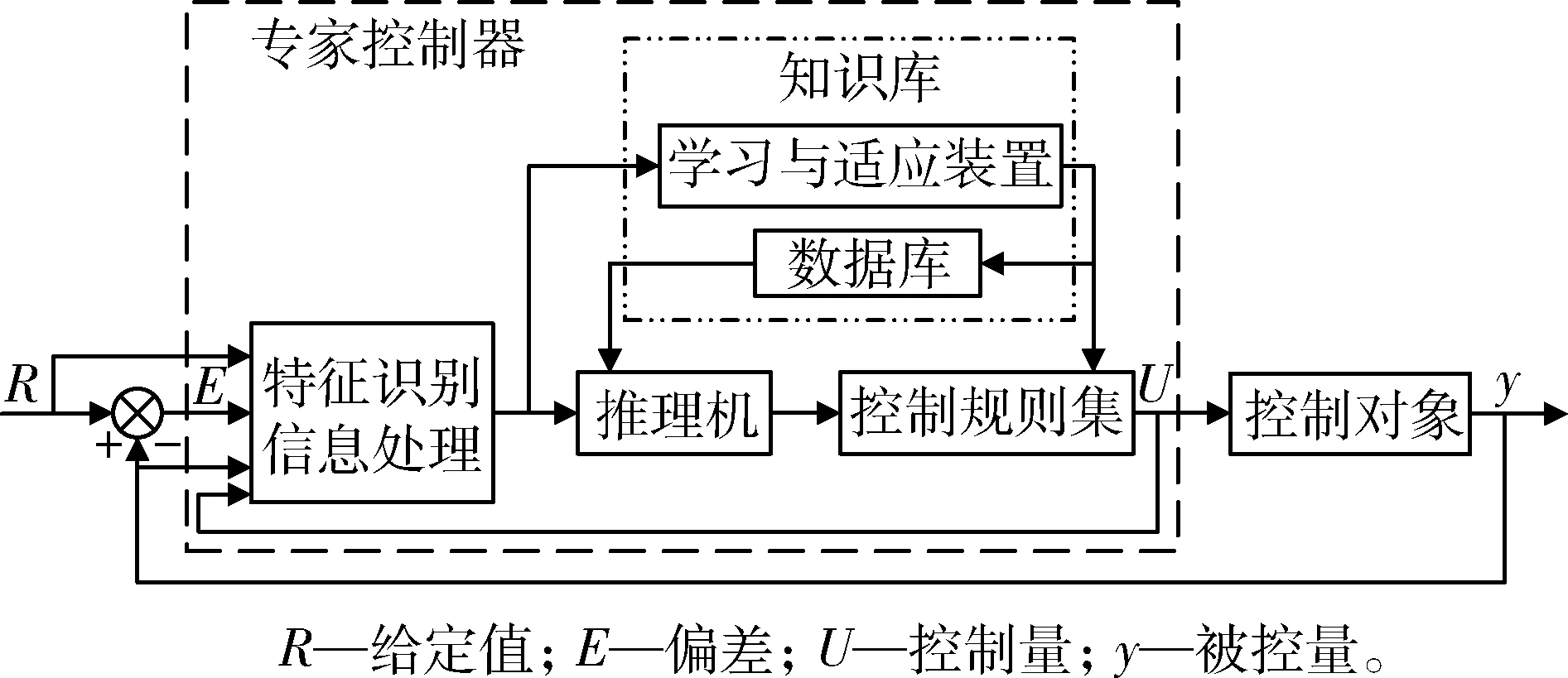
图3 专家PID控制器的结构
由图3可知:专家PID控制器实际上在控制量U和偏差E之间建立了一个映射关系,可表示为
U=f(E),
(14)
式中:f为智能算子。参考图3与式(14),设计温控系统专家PID控制程序结构如图4所示。

图4 温控系统专家PID控制程序结构
2.2 专家PID控制算法的建立
令e(k)=Tset-T(k),其中:Tset为根据飞机保障需求设定的飞机液冷车液冷介质的出口温度;T(k)为温度传感器在第k次采样时刻测得的液冷车实际出口温度(即图1中温度传感器采集的温度);e(k)为在第k次采样时刻测得的介质实际温度和需求温度之间的偏差。温控系统专家PID控制器设计的目的是尽可能地降低e(k)的绝对值。则e(k-1)和e(k-2)分别表示第k-1、k-2次采样时刻液冷介质实际温度与需求温度之间的偏差,并有
(15)
式中:Δe(k)、Δe(k-1)分别为第k、k-1次采样时刻测得的介质实际温度与需求温度偏差的一次差分;Δ2e(k)为第k次采样时刻测得的介质实际温度与需求温度偏差的二次差分。Δe(k)与Δ2e(k)分别表示了e(k)与Δe(k)的变化趋势。
以e(k)、u(k)分别表示温控系统专家PID控制器第k次采样时刻的输入与输出量,笔者提出了飞机液冷车温控系统专家PID控制规则,如表1所示。
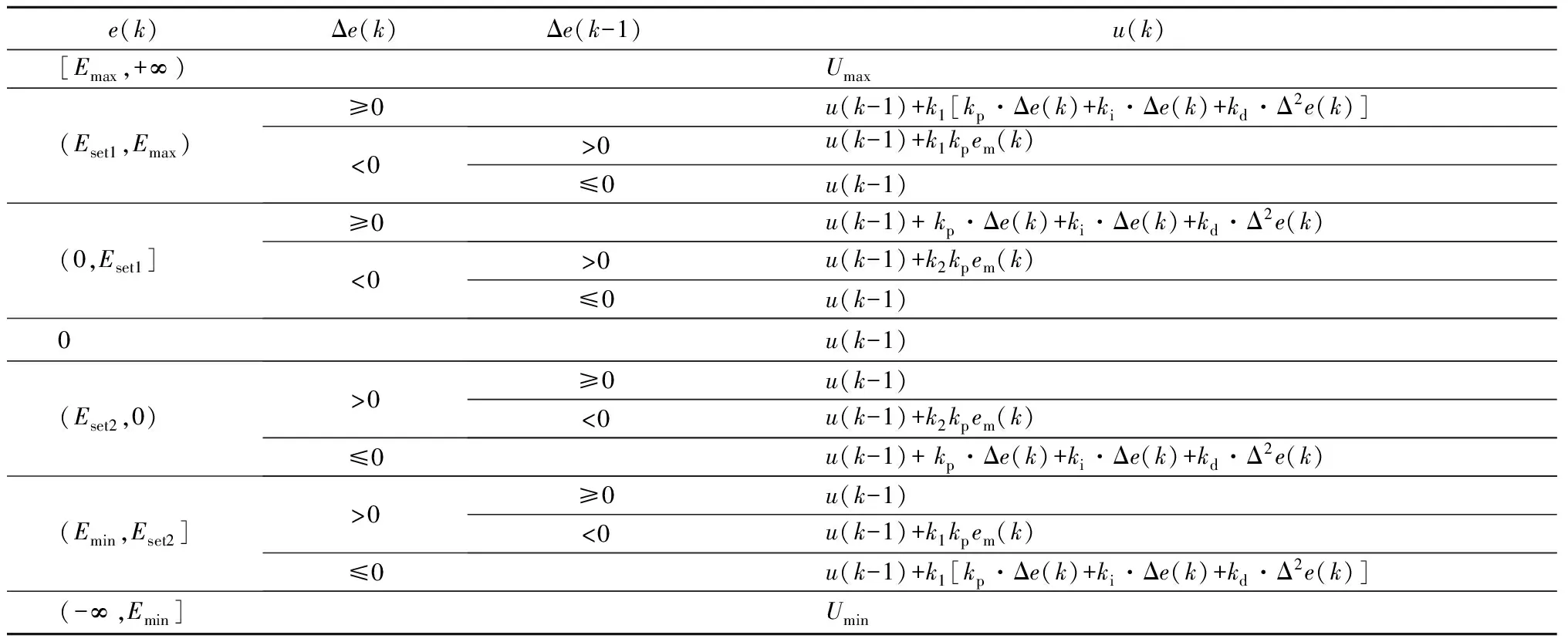
表1 飞机液冷车温控系统专家PID控制规则
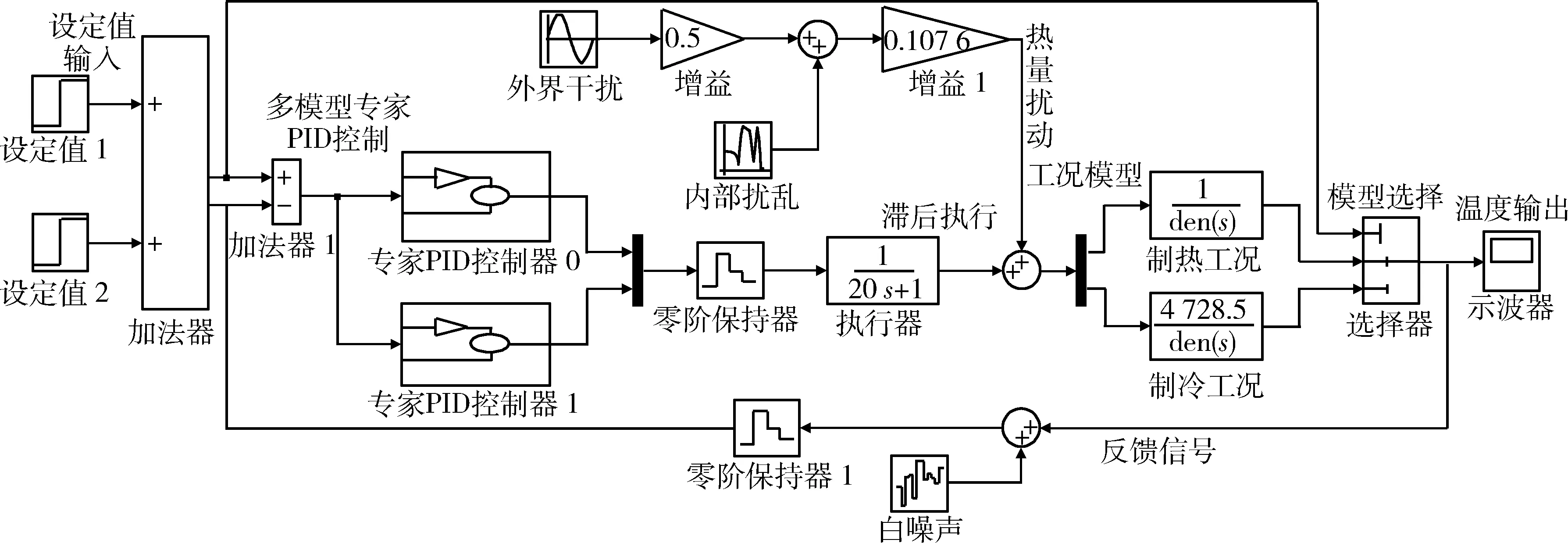
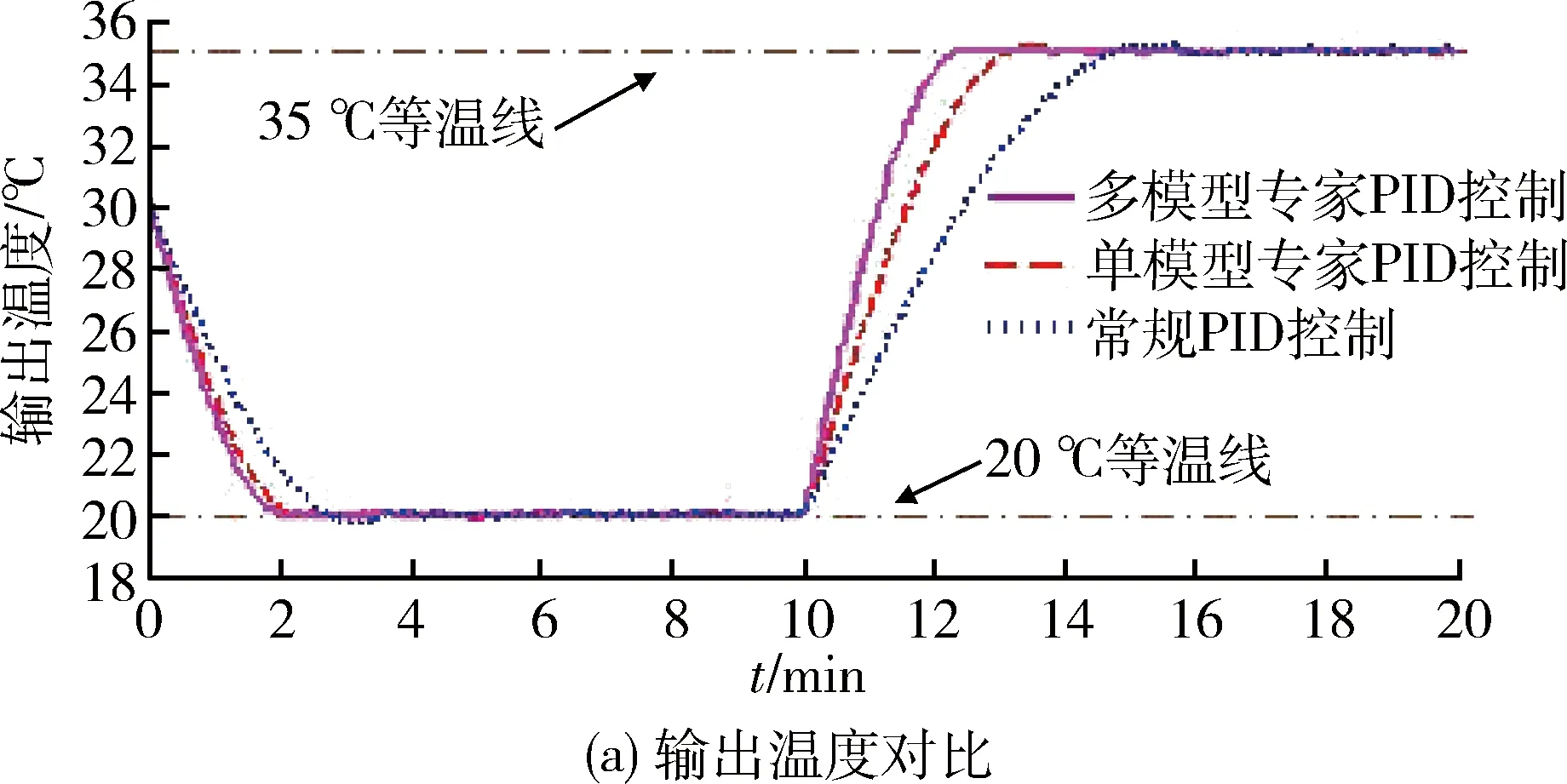
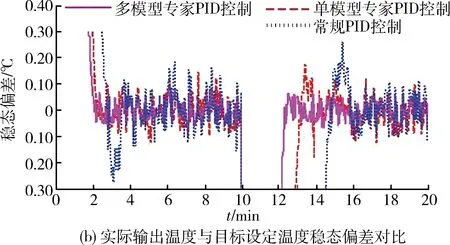
注:Emax、Emin、Eset1、Eset2均为设定的偏差界限值,且Emin 3.1 仿真模型的建立 基于表1,利用MATLAB软件中的仿真工具箱Simulink提供的功能模块,笔者设计了基于多模型专家PID控制的飞机液冷车温控系统仿真模型,如图5所示。其中:专家PID控制器0对应u=0,即制热工况;专家PID控制1对应u=1,即制冷工况。参考文献[8-10],为仿真模型设置外界热扰。为使仿真更接近实际工况,反馈中添加了白噪声干扰。 图5 基于多模型专家PID控制的飞机液冷车温控系统仿真模型 3.2 系统仿真分析 为了综合比较分析多模型专家PID控制、单模型专家PID控制和常规PID控制的优劣,对3种控制方式下的飞机液冷车温控系统同时进行了仿真。仿真中,假定温控系统入口温度的初始值为30 ℃,仿真时间设定为20 min,目标出口温度设定为20 ℃,10 min后改为35 ℃。3种控制方式下系统仿真结果对比如图6所示。 图6 3种控制方式下系统仿真结果对比 1)制冷工况。在0~10 min内,飞机液冷车出口液冷介质温度由初始30 ℃下降到20 ℃,温控系统处于制冷工况。在多模型专家PID控制、单模型专家PID控制和常规PID控制下,温控系统的响应时间分别为2、2.1、2.8 min,稳态偏差分别为0.5%、0.75%、1.5%。其中:2种专家PID控制的系统响应时间差距较小,为0.1 min;而常规PID控制相比差距较大,其与多模型专家PID控制相差0.8 min。 2)制热工况。在10~20 min内,飞机液冷车出口液冷介质温度由初始20 ℃上升到35 ℃,系统处于制热工况。在多模型专家PID控制、单模型专家PID控制和常规PID控制下,系统响应时间相差较大,分别为2.3、3.1、4.5 min,系统稳态偏差分别为0.2%、0.51%、0.71%。 由仿真结果可以看出:与常规PID控制相比,专家PID控制下的飞机液冷车温控系统响应时间短,进入稳态后的温度偏差小,且系统工作振荡幅度小、频率低;而多模型和单模型专家PID控制下的系统响应时间在制冷工况下差距较小,但在制热工况下差距较大,其中多模型专家PID控制下的系统响应时间更短,且仿真曲线振荡幅度更小。由此可知:对于飞机液冷车温控系统,多模型专家PID的控制效果优于单模型专家PID控制和常规PID控制。 笔者基于多模型专家PID控制建立了飞机液冷车温控系统模型,并利用Simulink软件进行了仿真研究。结果表明:与常规PID控制相比,专家PID控制在控制过程中通过内部存储的专家PID控制规则对PID控制参数kp、ki、kd进行在线调整,对飞机液冷车温控系统的控制性能更好,能够弥补常规PID控制对数学模型不精确的非线性时变系统进行控制的不足;而且与单模型专家PID控制相比,多模型专家PID控制具备更优越的控制性能,尤其在制热工况下,系统的响应速度、控制精度等均有较大幅度的提高,在实际的飞行保障任务中,面对复杂多变的工作环境,尤其是面对野外保障或战场环境时,该控制方式具有更好的控制能力。 参考文献: [1] 张科,周志刚,吴兆林. 飞机地面加液冷却车的应用与发展[J].流体机械,2009,37(12):80-84. [2] 唐华杰,吴兆林,周志刚.飞机地面空调车和军用飞机地面液体冷却车的应用和发展[J].流体机械,2006,34(2):72-75. [3] 王恒飞,陈永亮,郭春裕. 锅炉过热蒸汽出口压力的串级专家PID控制[J]. 自动化仪表,2015,36(10):99-102. [4] 张天孙. 传热学[M]. 北京:化学工业出版社,2002:12. [5] 国防科学技术工业委员会.飞机地面保障设备通用规范:GJB1132—1991[S]. 北京:国防科学技术工业委员会,1991. [6] 秦叔经,叶文邦. 换热器[M]. 北京:中国电力出版社,2006:262-287. [7] 刘金琨. 先进PID控制及其MATLAB仿真[M]. 北京:电子工业出版社,2003:63-67. [8] 曹国庆,涂光备,安大伟,等. 基于MATLAB的空调系统专家PID控制的建模与仿真[J]. 暖通空调,2005,35(11):111-114. [9] 丁国良. 制冷空调装置的计算机仿真技术[J]. 科学通报,2006,51(9):998-1010. [10] 黄永安,马路,刘慧敏. MATLAB 7.0/Simulink 6.0建模仿真开发与高级工程应用[M]. 北京:清华大学出版社,2005:46-61. (责任编辑: 尚彩娟) Modeling and Simulation of Temperature Control System for Aircraft Liquid Cooling Vehicle Based on Multiple Model Expert PID Control LI Xu, LEI Jin-guo, ZHANG Yong-liang (Department of Aviation Four Stations, Air Force Logistics College, Xuzhou 221000, China) Aiming at the problem that the common PID control method is hard to satisfy the control demand of the temperature control system for aircraft liquid cooling vehicle which is a system with nonlinea-rity, time varying, imprecise model and complicated work environment, a multiple model expert PID temperature control method is put forward. According to the aircraft support demands and the liquid cooling vehicle’s working condition, two different mathematical models in the refrigeration condition and the heating condition are built respectively, and a system of multiple models expert PID temperature control system is designed, and further studies on the system are done based on Simulink. The simulation results show that compared with the common PID control and the single model expert PID control in the refrigeration condition, the multiple model expert PID control is superior, it can improve the transient response, the steady state accuracy and the interference immunity of the system, having a nice prospect for applications. temperature control; expert PID control; aircraft liquid cooling vehicle; simulation 1672-1497(2017)03-0075-05 2017-03-24 李 旭(1993-),男,硕士研究生。 V351.3; TP273 A 10.3969/j.issn.1672-1497.2017.03.0143 建模与仿真分析
4 结论
猜你喜欢
现代机械(2023年5期)2023-11-15 12:30:54
汽车实用技术(2022年15期)2022-08-19 03:25:10
云南化工(2021年8期)2021-12-21 06:37:46
军事文摘·科学少年(2021年7期)2021-09-26 17:17:08
军事文摘(2021年14期)2021-08-16 08:39:42
装备制造技术(2020年2期)2020-12-14 03:09:22
原子与分子物理学报(2020年5期)2020-03-17 06:59:42
电站辅机(2017年3期)2018-01-31 01:46:38
电子制作(2016年15期)2017-01-15 13:39:06
时代农机(2016年6期)2016-12-01 04:07:23
