让汽车科学转弯
——探寻汽车科学转弯的操控规律
2017-06-27 05:47:10文湖北省武昌实验中学高二王一帆
发明与创新 2017年26期
文湖北省武昌实验中学高二(3)班 王一帆
让汽车科学转弯
——探寻汽车科学转弯的操控规律
文湖北省武昌实验中学高二(3)班 王一帆

如今开车的人越来越多,表哥刚满18岁也去报名学车,然而学车的过程并不顺利,原因之一就是对汽车的转向把握不好。事实上,很多车祸都是在车辆变道、转弯的环节中,司机操控不当造成的。
针对这个问题,我决定以表哥学车的经历为契机,探寻解决的办法。
一、分析问题
表哥说他在学车时经常遇到的问题是:汽车转向时前轮能顺利通过而后轮总是压线。
汽车直行时,前、后轮可以形成“一道辙”。转弯时,前、后轮形成的物理轨迹有可能不同。我认为,车辆转弯半径一定程度上可以归结为车轮形成轨迹的半径。
所以,我想以车轮转弯形成的物理轨迹为突破口,通过车轮轨迹的数理分析,探寻汽车科学转弯的操控规律。
二、构建模型
1.车轮转弯形成的轨迹关系
将方向盘转动一个角度并一直行驶时,汽车就会转圈,每个轮胎的轨迹都是圆形。四个车轮转弯时形成的圆形之间是什么关系?通过简单的数学论证就能得出结论:汽车的四个轮子在转弯时形成的轨迹是四个同心、半径不同的圆。
2.车轮转弯半径之间的关系
既然车轮轨迹是同心但半径不同的圆,它们的半径之间又有怎样的关系?
(1)通过汽车内、外侧前轮偏转角的计算,分析内、外侧车轮转弯半径之间的关系。

图1
我采用数形结合的方法分析,设α角为内侧前轮的偏转角,L为轴距,m为车宽,β为外侧前轮的偏转角,根据图1所示,可求得r(内侧后轮)=,r(内这个距离加在后轮上再次构图观察,发现其端点也在同一个圆上。用平滑的线将其连接,便形成了另一个大圆轨迹,如图3所示。侧前轮)=,这样能计算出内侧车轮的轨迹半径。

图2

图3
外侧车轮的轨迹半径也可根据内侧结果表达:r(外侧后轮)=(外侧前轮)= ■L2+r(2外侧后轮)=
通过以上分析,可以发现距离内侧后轮轴心的距离c的点的转弯半径如图2所示,可以算出该处的半径 R=。当c=0时,内侧后轮轨迹半径最短;该点位于内侧前轮轴心时,也就是距离内侧后轮轴心最远时,半径最长。
α、β两角的大小不同,即内侧前轮的偏转角大于外侧前轮的偏转角。
根据计算,汽车内、外侧车轮偏转角的大小和转弯半径长短的关系是:内侧前轮的偏转角大,其转弯半径短;外侧前轮的偏转角小,其转弯半径相对较长。同理,内侧后轮的偏转角大,其转弯半径短;外侧后轮的偏转角小,其转弯半径相对较长。
(2)通过内侧面一点到后轮轴心距离的变化,分析同侧车轮转弯半径之间的关系。
汽车如何才能安全转弯?我以汽车内侧面为临界面,分析汽车转弯时内侧哪个部位经过的半径最长。
假设内侧某处距离汽车后轮轴心的水平距离为c,设该处转弯半径为R,将此半径为前轮转弯半径,经计算R=
从汽车内侧车轮的数据分析可得,前轮转弯半径长,后轮的转弯半径相对较短。同理推得,汽车外侧前轮转弯半径长,外侧后轮转弯半径相对较短。
综上,汽车四个车轮转弯半径长短关系是:内侧后轮转弯半径最短,其次是内侧前轮、外侧后轮,外侧前轮转弯半径最长。
司机在实际的驾驶操控中,如果障碍物在转弯内侧,由于内侧前轮转弯半径长于后轮,那么前轮能通过,后轮则不一定能通过;如果障碍物在转弯的外侧,由于外侧前轮转弯半径长于后轮,所以只要前轮能通过,后轮肯定能顺利通过。
(3)通过测算模型找出安全转弯操控的规律。
①假设车辆前、后两轮转弯的半径差为s,设前轮经过障碍物时,与障碍物的距离为x,经过计算。所以,当后轮压线时s>x,当后轮可以顺利通过时s<x。
根据这个公式,当s=x时就可以算出在想要保证后轮不压线时,前轮应该与障碍物保持的最小距离。
结合前述车轮偏转角与转弯半径间的公式关系,即r(内侧后轮)=为保证转弯时后轮不压线或不压空,现以一轴距L为2m的特定汽车为例进行测算。
设α是车轮偏转的角度,r是内侧后轮的转弯半径,x是前轮与障碍物保持的最小距离,由此可形成一个闭合式的测算模型。以特定值测算的数据值如表1。
②根据半径差值s的公式还可以发现,s的大小与轴距L有关,我想这也可以解释为什么持C照的司机不能开大车。下面通过计算进行简要证明。
假设一辆轴距为2m的小车的偏转角为45°(事实上一般偏转角不会这么大,但为了进行更鲜明的数据对比和计算方便,暂且设偏转角为45°),算出s≈0.83m。若一辆轴距为10m的大车偏转角也为45°,算出s≈4.15m。
比较两组数据可以看出,大车需要留出的空间是小车的5倍,这就说明驾驶大车时需要更好的操作技术。
③方向盘转动角度与车轮实际偏转角度的比值为转向传动比,假设转向传动比为20∶1,α代表车轮偏转角度,20α代表方向盘转动角度,r为半径,相关数据参数测算如表2。
(4)经过上述模型的建立,在确保汽车内侧后轮安全通过障碍物的基础上,根据数据链关系,可得到前轮与障碍物保持的最小距离。
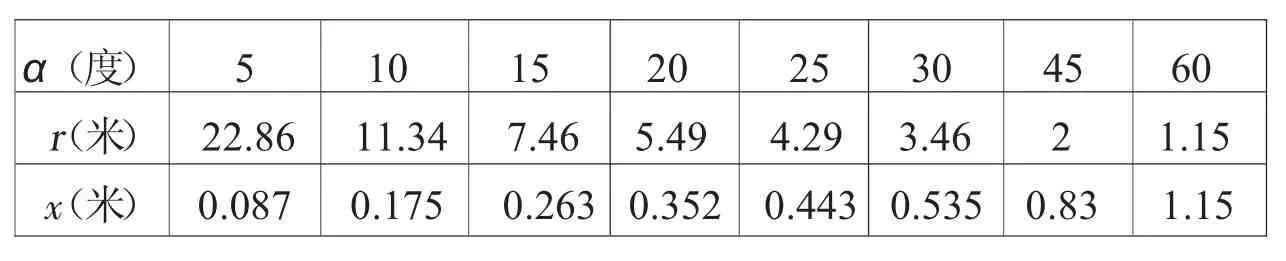
表1

表2
因为车宽m是固定的,所以外侧前轮确保安全通过障碍物的最小数值等于前轮与障碍物保持的最小距离加上m。
根据上述分析,在行车转弯的过程中,涉及安全操控的关键问题本质上是汽车内侧后轮和外侧前轮的转弯半径问题,即两侧前轮与障碍物、危险边界保持的最小距离数值。该数值可通过测算模型得出。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06 03:36:14
世界博览(2020年24期)2020-12-23 05:45:06
小学生学习指导·爆笑校园(2019年6期)2019-09-10 04:06:25
建材发展导向(2019年10期)2019-08-24 06:24:40
今古传奇·故事版(2017年24期)2018-02-07 19:06:24
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10 02:39:14
腹腔镜外科杂志(2016年10期)2016-06-01 12:10:08
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
爆笑show(2015年8期)2015-09-22 01:50:47
计算机与网络(2015年21期)2015-03-28 01:38:54