山地果园蓄电池驱动单轨运输机的在轨位置感知系统
2017-06-27 08:12洪添胜李加念吕石磊
河南农业大学学报 2017年1期
李 震, 刘 岳, 洪添胜, 贾 闯, 李加念, 吕石磊
(1.华南农业大学 电子工程学院,广东 广州 510642;2.国家柑橘产业技术体系机械研究室,广东 广州510642;3.广东省农情信息监测工程技术研究中心,广东 广州 510642;4.华南农业大学 工程学院,广东 广州 510642;5.昆明理工大学现代农业工程学院,云南 昆明 650500)
山地果园蓄电池驱动单轨运输机的在轨位置感知系统
李 震1,2,3, 刘 岳1,2,3, 洪添胜2,4, 贾 闯2,5, 李加念2,5, 吕石磊1,3
(1.华南农业大学 电子工程学院,广东 广州 510642;2.国家柑橘产业技术体系机械研究室,广东 广州510642;3.广东省农情信息监测工程技术研究中心,广东 广州 510642;4.华南农业大学 工程学院,广东 广州 510642;5.昆明理工大学现代农业工程学院,云南 昆明 650500)
为实现山地果园蓄电池驱动单轨运输机在运行过程中自动感知其在轨位置,本研究设计了基于RFID的单轨运输机在轨位置感知系统。硬件由读写器和RFID标签构成,读写器主要包括非接触式读写控制芯片、电源电路、功率放大电路、天线、微处理器、EEPROM等。系统软件可实现存储、识别标签信息,并匹配在轨位置。研究中测试了运输机行进速度对标签读取结果的影响,还测试了系统匹配标签和容错的能力。结果表明:(1)运输机的行驶速度介于0.2~0.6 m·s-1时,正确读取标签次数与理论值的吻合度介于97%~60%,速度越快,吻合度越低;在运输机的工作速度范围内,系统能够保证驶过一个标签时成功读取该标签信息1次以上;(2)系统软件能够实现匹配标签与位置信息、容错和纠错等功能。
山地果园;运输机械;位置感知;RFID
中国南方水果生产的立地条件多为山地和丘陵,农资物料和果品运输以人力为主,生产效率低、劳动强度大。山地水果生产过程中通过机械化运输提高生产效率、降低劳动强度所带来的经济效益日趋体现[1-4],促进了山地果园机械化运输技术的发展。山地果园单轨运输机因具有结构简单、转弯半径小、轨道铺设灵活、安装及操作性能好等优点,已在国内多处山地果园推广使用[5-8]。山地果园蓄电池驱动单轨运输机相对于以汽/柴油为动力的单轨运输机具有更好的灵活性和安全性。该类运输机可沿山体铺设循环轨道,具有多机同步运行的能力。配合遥控技术,操作人员可与运输机分离。但是,山地果园坡度陡、山路曲折迂回、弯曲处密集,仅凭肉眼无法准确判断运输机当前的在轨位置,因而不能够做出准确的控制。如果运输机在运行时能够自动感知其在轨位置,就可以实现让其按照预定的路线全自动运行,进一步降低操作人员的劳动强度,提高生产效率[9]。交通运输装备定位一般选用卫星定位装置[10-12]。在山地果园运输作业中,轨道铺设在山间,普通的定位装置受地形和植被影响,定位精度约为5~10 m,精度偏低;高分辨率的定位装置受价格因素制约,不适用于山地果园运输机械[13]。因此,卫星定位手段不适宜应用于山地果园运输装备上。射频识别(Radio Frequency Identification,RFID)技术通过无线通信将信息从标签传送到读写器,具有快速扫描、体积小型化、形状多样化、抗污染能力强特点,在射频门禁、电子溯源、食品溯源等方面得到广泛的应用[14-16]。RFID定位技术不需要卫星或者手机网络的配合,是对卫星定位系统很好的补充[17-18]。RFID定位精确度主要取决于读写器和标签的分布,可以根据实际需要进行配置[19-21]。为实现山地果园蓄电池驱动单轨运输机在运行过程中自动感知其在轨位置,本研究设计了基于RFID的山地果园蓄电池驱动单轨运输机在轨位置感知系统,读写器安装在运输机上,沿轨道放置RFID标签,运输机行进过程中读写器无线读取标签信息,感知其在轨位置。该系统满足了山地果园蓄电池单轨运输机在运行过程中自动感知其在轨位置的要求,为进一步实现单轨运输机到达指定在轨位置的要求提供了技术基础。
1 系统硬件的设计
1.1 读写器硬件的设计
读写器主要由射频模块和控制处理模块组成,硬件结构如图1所示。射频模块工作于13.56 MHz频段,主要包括非接触式读写控制芯片(MFRC522,NXP Semiconductors,荷兰)、电源电路、功率放大电路、天线等;控制处理模块由微处理器(MSP430F149,Texas Instruments,美国)、电源、EEPROM(AT24C08,STMicroelectronic,美国)、按键等元件组成。
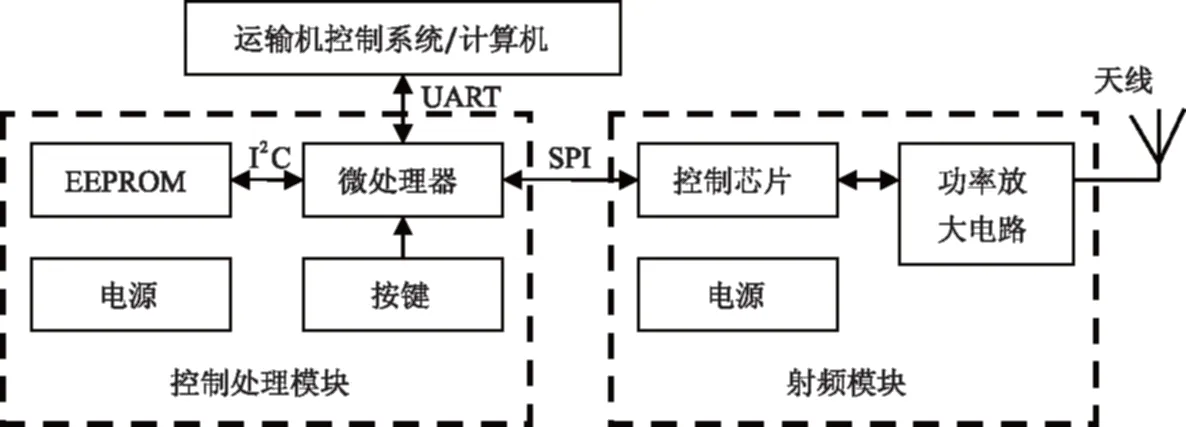
图1 读写器的硬件结构Fig.1 Hardware structure of the reader
读写器与运输机控制系统或计算机间通过通用串行接口(UART)进行通信以传递位置信息;EEPROM用于存储RFID标签信息与在轨位置间的映射关系;按键作为更新EEPROM中映射关系的硬件触发条件。
1.2 RFID标签选型与安装
由于山地果园单轨运输系统的轨道为金属材质,本研究选用高频抗金属RFID标签(C113020,常州高特电子技术有限公司,常州),该型标签贴于金属时的读取范围可达5 cm。标签用螺丝钉固定在与读写器同侧的轨道侧边(图2)。运输机行驶的轨道单节长度为6 m,通常情况下每节轨道贴1个RFID标签。
1.3 读写器安装
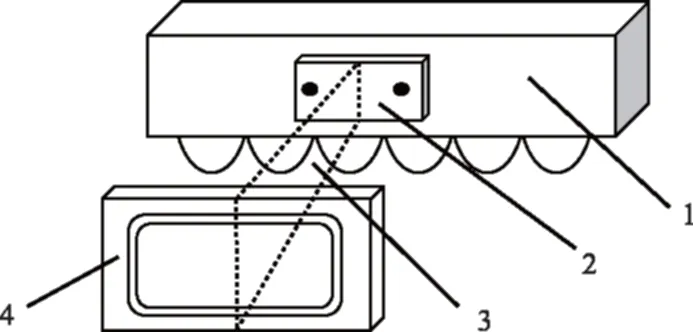
单轨运输机的驱动轮与轨道间采用齿式啮合,在驱动轮的一侧,装配有刹车盘、链轮等执行机构,工作时会对射频信号产生较大干扰。驱动轮的对侧没有装配执行机构,既可保证较好的通信质量,同时也为安装读写器预留了较大空间。因此,读写器固定于运输机机头的支架上,位于机头罩内,面向驱动轮没有执行机构的一侧,如图2所示。通过调节固定螺钉,保证读写器天线到RFID标签的距离d<5 cm,本研究中实测d=2.8 cm;当运输机位于平地时,标签的水平中位线与读写器天线的水平中位线处于相同的高度。
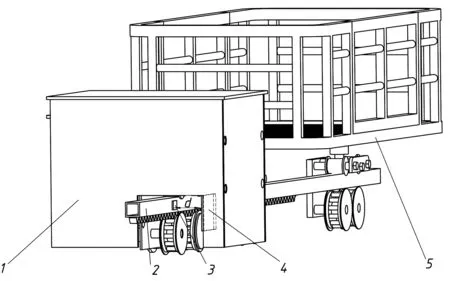
1.运输机机头罩;2.轨道;3.标签;4.读写器;5.货运拖车。
2 软件设计
2.1 标签信息与在轨位置间映射关系及其存储结构
2.1.1 标签信息与在轨位置间的映射关系 山地果园蓄电池驱动单轨运输系统的轨道沿山势铺设,从山脚一直延伸到山顶。标签按照一定的间隔布置在轨道上,将山脚处的第一个标签记为第“0”号标签,其所对应的轨道位置记为“0”号位置;将山顶端的最后一个标签记为第“N”号标签,其所对应的位置记为“N”号位置。
标签信息与其所代表的位置信息是“1—1”对应的映射关系,每一个标签信息代表唯一的位置信息。首次运行前,需对EEPROM中的映射关系进行初始化,方法为通过计算机将映射关系发送给读写器的微控制器,再由微控制器将其写入EEPROM中存储。完成初始化的系统在复位后会先将映射关系从EEPROM读入到微控制器的内存,以便于在系统工作过程中快速查找标签信息和感知运输机的在轨位置。
2.1.2 映射关系存储结构 在AT24C08中,存储的数据被分为4个扇区(Blocks),每个扇区有16个页(Pages),每个页包含16个字节(Bytes),既每个扇区可以存储256个字节,4个扇区合计可存储1 024个字节的数据。
山地果园中跨越2层果树种植层的轨道长度约为5 m,在每层果树对应的轨道位置放置RFID标签,使运输机自动识别其当前所在的层。已有的山地果园轨道运送系统轨道长度约为300 m,每隔5 m贴一个标签时,连同起始位置的标签,共需存储61对标签信息及其所代表的位置信息的映射关系。本研究所选用的标签信息长度为2字节,为适应AT24C08的数据连续写入/读取功能,提高读取效率,位置信息也用2字节存储,分别为该位置对应层数的十位和个位的ASCII码。存储结构如图3所示。
2.2 标签信息匹配算法
系统上电后,MSP430微处理器先将存储在AT24C08中的映射关系读入自身的RAM中,以便后续运行过程中快速查找标签信息并识别在轨位置。读写器读取标签信息后,在自身的RAM中搜索与之匹配的位置信息,工作过程如图4所示。

图3 映射关系存储结构Fig.3 Mapping relationship storage structure

图4 标签信息匹配算法工作过程
映射关系占用较多的存储单元,每次识别到标签信息后都遍历存储区将带来比较严重的时间延迟。因此,需要根据运输机行进方向和当前位置信息,设计标签信息匹配算法,提高标签信息匹配的效率。标签信息匹配算法流程图如图5所示。
运输机工作时,主控制系统将运行方向信息发给RFID读写器的MSP430微处理器,作为在存储区中搜索匹配的标签信息的依据。程序中设置2个指针“Pointer_tag”和“Pointer_location”。其中“Pointer_tag”指向当前标签信息的高8位,“Pointer_location”指向当前位置信息的“十”位。当检测到与当前标签信息不匹配的新标签时,系统按照图4的流程进行标签匹配,如果成功,则改变“Pointer_location”的值,使其指向对应的位置信息存储单元,并将该单元及其后续一个单元的信息存入AT24C08中。系统再次上电后,以在AT24C08中存储的位置为起点搜索标签,避免每次启动都遍历存储区,提高标签信息匹配的效率。
算法中设置了容错机制,以应对当系统掉电后,运输机被人为移动了位置的情况。此时,如果上电后从AT24C08中读取的当前位置信息与实际位置不同,处理方法为设置容错计数器“Lack”,当发生标签变化,且存储的标签信息与实际信息不匹配时,Lack自增1。本研究中预设当出现3次该类情况时,微处理器从存储的第0个标签信息开始遍历存储区,进行标签信息匹配。
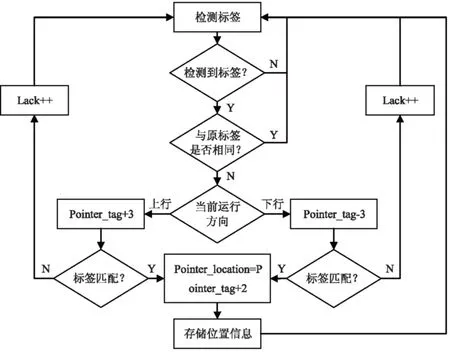
图5 标签信息匹配算法流程图
3 系统测试
3.1 运输机行进速度对标签读取结果的影响
3.1.1 静态测试
3.1.1.1 测试方法 标签与读写器安装方式如图2,手动调节运输机,使标签的纵向中位线与读写器的纵向中位线所构成的平面与轨道外缘平面垂直,如图6所示。
1.轨道;2.RFID标签;3.中位线构成平面;4.读写器天线。
运输机处于停止状态,将读写器与计算机相连,每次读到标签信息后,读写器将该信息反馈给计算机并进行显示。利用秒表计时,记录5 s内读写器读取标签的次数,连续进行5次试验,将5次的读取次数取平均值作为静态测试结果。
3.1.1.2 测试结果 5次试验结果见表1。用标签信息读取次数的平均值除以平均用时,得到读写器在1 s内约可读取标签信息15.1次,取整数15次。
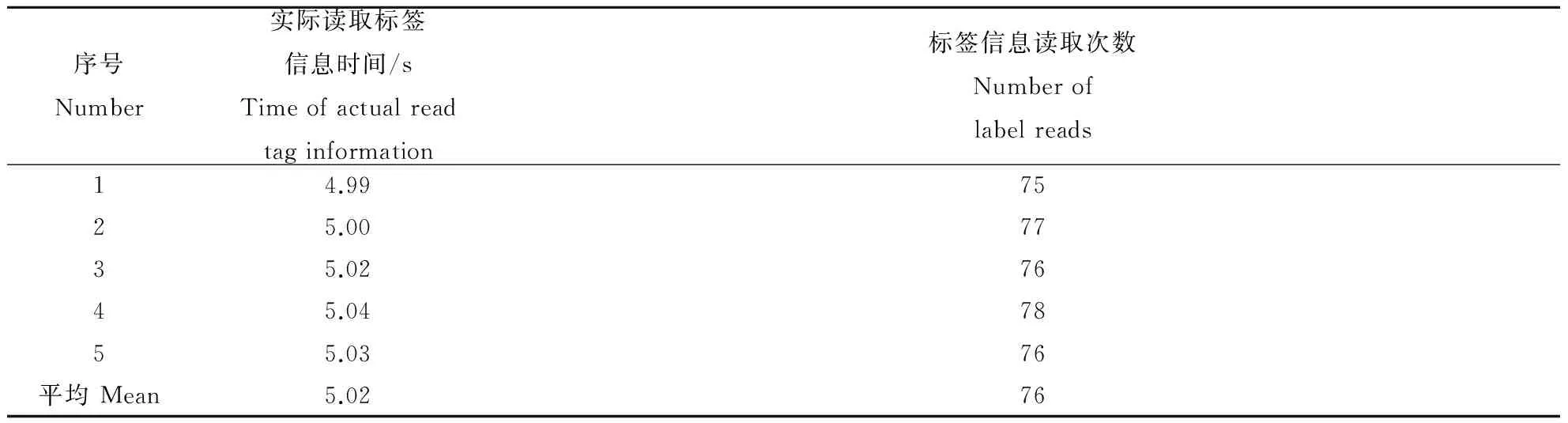
表1 静态测试结果
3.1.2 运输机行驶状态下测试 该测试的目的是检验当运输机工作在设计速度(0.2~0.6 m·s-1)时,位置感知系统能否稳定的读取每个标签的信息。测试方法为控制运输机的行驶速度分别为0.2、0.4、0.5和0.6 m·s-1,测量读写器以不同的车速驶过标签过程中读取标签信息的次数。定义测试结果与理论值的吻合度为:
(1)
式中:Match为测试结果与理论值的吻合度;Kt为通过计算得到运输机行驶通过标签的读取区域时读写器可读取标签的次数;Ki为第i次试验测试得到运输机行驶通过标签的读取区域时读写器实际读取标签的次数;N为运输机在某一行驶速度下进行标签读取能力测试的次数。
满足读写器能够有效读取标签信息条件下,运输机行驶距离(2×l)的示意图如图7,按照式(2)计算运输机从进入标签的有效读取区到标签中心正对读写器天线中心时的行驶距离l为:
(2)
式中:l为运输机从进入标签的有效读取区到标签中心正对读写器天线中心时的行驶距离,cm;r为标签的有效读取距离(半径),cm;d为RFID天线与标签间的垂直距离,cm。
其中,d=2.8 cm,r=5 cm,代入式1得到l=4.15 cm,2×l=8.3 cm,即运输机驶入标签有效读取区到驶出有效读取区的距离为8.3 cm。
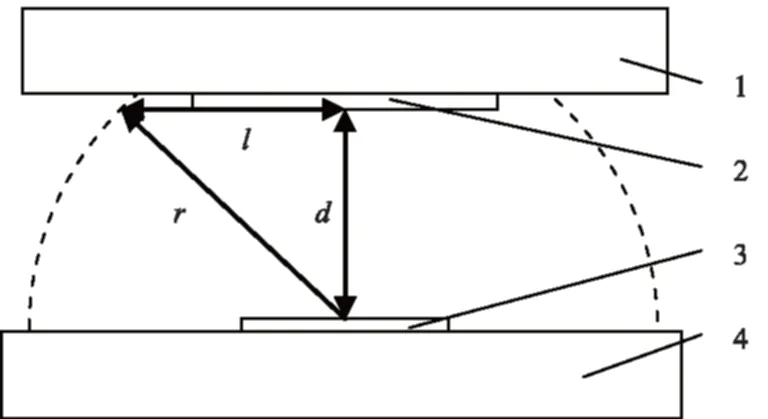
1.运输机机头罩;2.读写器;3.标签;4.轨道。
当运输机行驶速度分别为0.2、0.4、0.5、0.6 m·s-1时,通过8.3 cm的时间分别为0.42、0.21、0.17、0.14 s,理论上当运输机驶过时可读取标签信息的次数分别为6、3、3、2次。每个行驶速度分别进行5次试验,结果如表2。从表2可以看出,(1)测试结果与理论值的吻合度介于60%到97%之间,行驶速度越快,吻合度越低;(2)5次测试中每个行驶速度下的读取成功率均达到100%,说明当运输机工作在设定速度时,读写器均能够成功读取标签信息1次以上,满足在轨位置感知的要求。
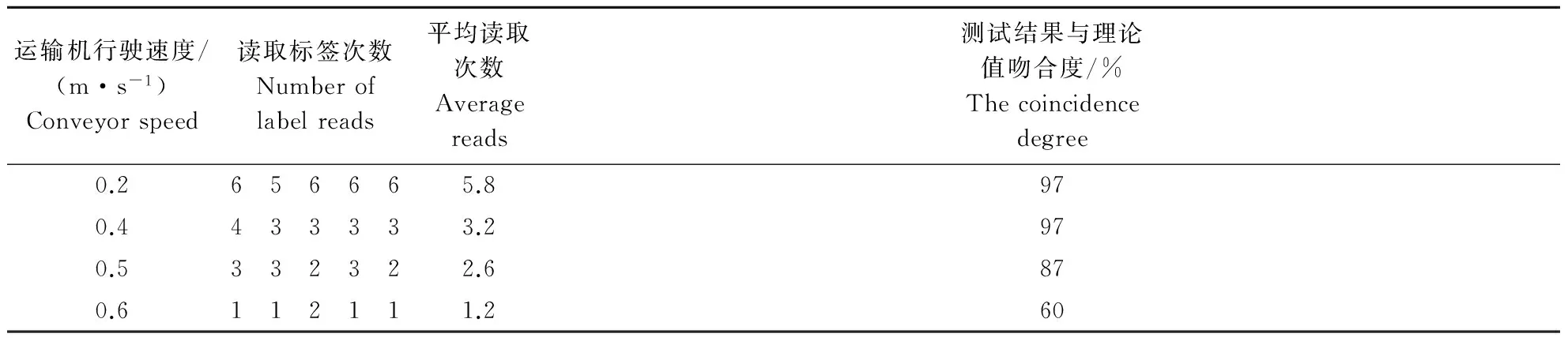
表2 运输机行驶状态下标签读取能力测试结果
3.2 系统实际工作效果测试
3.2.1 正常工作状态测试 沿轨道连续铺设5个标签,并设定每个标签对应位置分别为0、1、2、3、4,运输机起始点在“0”号标签之前,分别以0.2、0.4、0.5、0.6 m·s-1的速度驶过5个标签。读写器与计算机相连,每匹配到一个新标签时读写器将其对应的位置信息发送给计算机显示。由于此时读写器无法接受来自运输机主控制器的行驶方向信息,在本研究中将读写器程序在存储器中搜索标签的方向固定为“上行”。正常工作状态测试中,运输机工作在每个行驶速度条件下均测试5次。
3.2.2 容错能力测试 通过程序设定AT24C08中存储的位置信息为“0”位置。移动运输机,使读写器在断电的状态下越过代表位置“0”的标签,再次启动时第一个读取的标签将为位置“1”,同时在程序中增加反馈“Lack”计数器值,观察计算机显示内容。容错能力测试中,运输机工作在0.4 m·s-1,连续测试5次。
3.2.3 测试结果 工作效果测试时计算机运行串口调试助手的截屏如图8。从图8可以看出,(1)在正常工作状态下,运输机连续驶过5个标签,5次试验中读写器均可成功读取每个标签信息并正确反馈所对应的位置;(2)容错能力测试中,运输机被人为移动位置,RFID读写器上电后能够按照预设的方法,当连续3次匹配标签和位置信息失败后,微处理器中的程序可自动重新遍历整个存储区,在读到第4个标签后实现正确匹配标签和位置信息。
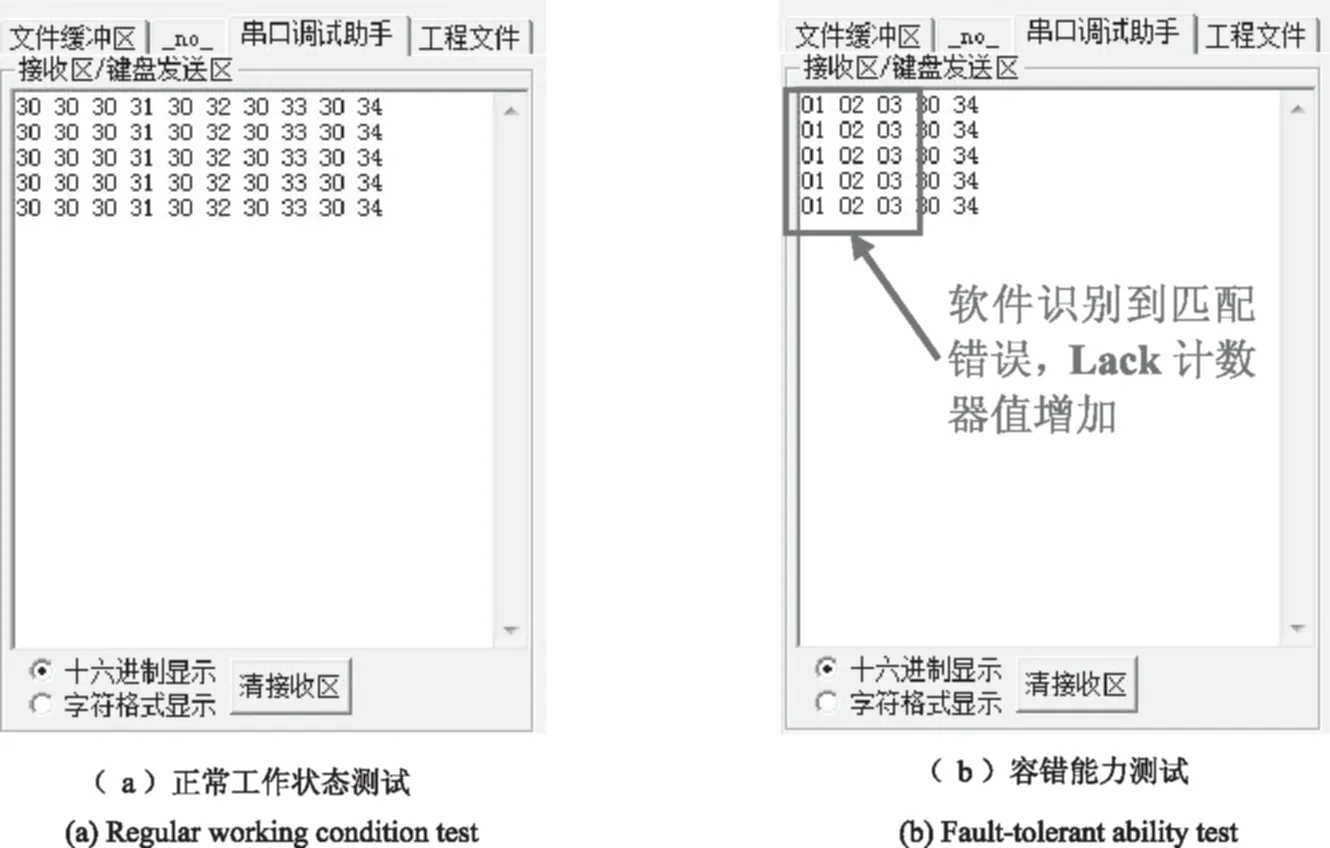
图8 工作效果测试时计算机串口调试助手Fig.8 Serial port debugging assistant in working effect test
4 结论
为实现山地果园蓄电池驱动单轨运输机在运行过程中自动感知其在轨位置,本研究设计了基于RFID的山地果园蓄电池驱动单轨运输机在轨位置感知系统,硬件由读写器和RFID标签构成,其中读写器主要包括非接触式读写控制芯片、电源电路、功率放大电路、天线等;系统软件可实现存储与匹配标签信息与在轨位置间的映射关系,并具有容错能力。读写器安装在运输机上,沿轨道放置RFID标签,运输机行进过程中读写器无线读取标签信息,感知自身的在轨位置。
为检验系统工作效果,测试了运输机行进速度对标签读取结果的影响,并模拟正常和人为在断电状态下移动运输机以测试系统的标签匹配和容错能力。试验结果表明:(1)运输机静止且读写器与标签间距离小于标签的有效读取距离时,读写器在1 s内约可读取标签信息15次;运输机的行驶速度介于0.2~0.6 m·s-1时,正确读取标签次数与理论值的吻合度介于97%~60%之间,速度越快,吻合度越低;在运输机的工作速度范围内,系统能够保证驶过一个标签时成功读取该标签信息1次以上。(2)运输机在正常工作状态下,读写器可成功读取每个标签信息并正确反馈所对应的位置;运输机被人为移动位置,读写器能够按照预设的方法进行纠错和重新匹配,实现了预定目标。
[1] 洪添胜,杨洲,宋淑然,等. 柑橘生产机械化研究[J]. 农业机械学报,2010,41(12):105-110.
[2] 刘滨凡,王立海. 单轨车的发展及在我国林业中的应用[J]. 森林工程,2008,24(1):25-27.
[3] 陈世林. 夷陵区标准柑橘园建设技术路线[J]. 中国果业信息,2010,27(5): 22-23.
[4] YAMAMOTO S, KANAMIITSU M, AJIKI K, et al. New technologies and systems for high quality citrus fruit production, laborsaving and orchard construction in mountain areas of Japan[J]. Journal of Mountain Science, 2005, 2(1): 59-67.
[5] 张俊峰,李敬亚,张衍林,等. 山地果园遥控单轨运输机设计[J]. 农业机械学报,2012,43(2):90-95.
[6] 陈银清,洪添胜,孙同彪. 山地果园单轨货运机的最小转弯半径及最大承载量分析[J]. 农业工程学报,2012,28(S1):50-56.
[7] 张小江,高秀华,王云超,等. 车辆转向统一动力学模型及模型跟踪控制[J]. 农业工程学报,2009,25(11):173-177.
[8] 战廷文,张学锋,刘长乐,等. 单轨货运机应用现状[J]. 林业机械与木工设备,2008,36(12):45-47.
[9] 洪添胜,张衍林,宋淑然,等. 山地果园运输与喷雾机械的研究与应用[J]. 现代农业装备,2014,(5):21-27.
[10]CHENG W,CHENG X,SONG M,et al. On the design and deployment of RFID assisted navigation systems for VANETs[J]. IEEE Transactions on Parallel and Distributed Systems,2012,23( 7): 1267-1274.
[11]霍炎,卢雨萌,程伟,等. 基于RFID 技术的安全跟车系统[J]. 北京交通大学学报,2014,38(5):54-59.
[12]CHON H D,JUN S,JUNG H,et al.Using RFID for accurate positioning[J].Journal of Global Positioning Systems,2004,3(1/2): 32-39.
[13]朱余清,洪添胜,吴伟斌,等. 山地果园自走式履带运输车抗侧翻设计与仿真[J]. 农业机械学报,2012,43(Z1):19-23.
[14]孙书谨,陆安江,张正平.基于RFID 技术的蔬菜食品安全溯源系统研究[J].世界农业,2012,12( 12): 77-80,87.
[15]孙朝阳,张立新.基于RFID 棉种质量安全溯源管理系统的设计[J].江苏农业科学,2014,42( 11): 438-441.
[16]钟秀英. 药品物流作业活动调查与工作分析[J]. 物流工程与管理,2011,33(11):95-98.
[17]李杨阳,毛陆虹,张世林,等. 基于相控阵天线的RFID 定位系统的理论分析[J]. 微波学报,2014,30(6):80-85.
[18]杨祥平,杨旭.GPS测量的误差来源分析与应对措施[J].城市建设理论研究,2013,12( 3): 57-59.
[19]卲震洪,李文峰,吴怡. 基于改进当前统计模型的模糊自适应车辆定位算法[J].通信学报,2013,34(7):184-190.
[20]李程,钱松容. 射频识别动态定位方法[J]. 通信学报,2013,34(4):144-149.
[21]米根锁,罗淼,牛彦霞. 混沌微粒群优化BP神经网络算法在城市有轨电车定位中的应用[J]. 铁道学报,2015,37(6):67-72.
(责任编辑:蒋国良)
On-track positioning system for battery-drive mountainous orchard monorail transporter
LI Zhen1,2,3, LIU Yue1,2,3, HONG Tiansheng2,4, JIA Chuang2,5, LI Jianian2,5, LV Shilei1,3
(1.College of Electronic Engineering, South China Agricultural University, Guangzhou 510642, China; 2.Division of Citrus Machinery, China Agriculture Research System, Guangzhou 510642, China; 3.Guangdong Engineering Research Center for Agricultural Information Monitoring, Guangzhou 510642, China; 4.College of Engineering, South China Agricultural University, Guangzhou 510642, China; 5.Faculty of Modern Agricultural Engineering, Kunming University of Science and Technology, Kunming 650500, China)
An on-track position sensing system based on RFID for battery-drive monorail transporter was developed in this study to enable the mountainous orchard battery-drive monorail transporter to sense automatically its on-track position while it is on the move. The system hardware was composed of reader and RFID tag. The reader mainly includes the non-contact reading and writing control chip, power circuit, power amplifier, antenna, microprocessor, EEPROM, etc. The system software can store and identify tag information and matching it with the transporter’s on-track position. In the study, the influence of the transporter’s driving velocity on the tag reading result is tested, and the label matching and fault-tolerance capability of the system are also tested. The results indicated that: (1) when the transporter's driving velocity was in the range of 0.2 to 0.6 m·s-1, the consistency between the number of correct tag reading towards its counterpart theoretical number was in the range of 97% to 60%; the higher the velocity was, the lower the consistency was; in the range of the transporter’s working velocity, the system can ensure more than one successful tag reading when the transporter drives pass a label. (2) The system software can realize matching tag and location information, and have the fault-tolerance and error correction function.
mountainous orchard; transportation machine; position sensing; RFID
2016-06-29
公益性行业(农业)科研专项(201203016);现代农业产业技术体系建设专项(CARS-27);广东省高等学校优秀青年教师培养计划项目(Yq2013028);广东省科技计划项目(2016A020210093)
李 震(1981-),男,广东广州人,教授,博士,硕士生导师,主要从事机电一体化技术应用研究。
洪添胜(1955-),男,广东梅县人,教授,博士,博士生导师。
1000-2340(2017)01-0053-07
S126
A
猜你喜欢
青海草业(2022年2期)2022-07-23
军事文摘(2020年15期)2020-08-15
小哥白尼(军事科学)(2019年5期)2019-08-27
乡村地理(2018年3期)2018-11-06
小学生学习指导(小军迷联盟)(2018年10期)2018-10-12
乡村地理(2018年4期)2018-03-23
现代兵器(2017年4期)2017-06-02
中国交通信息化(2014年4期)2014-06-05
北京航空航天大学学报(2013年6期)2013-12-19
中州大学学报(2010年5期)2010-01-29