
徕卡Scanstation C10扫描仪扫描质量影响因素分析
2017-06-26 17:58欧江霞刘伟诚蔡茂欣
地理空间信息 2017年6期
欧江霞,刘伟诚,蔡茂欣
(1.广东天信电力工程检测有限公司,广东 广州 510663;2.广州市地质调查院,广东 广州510440;3.广州市海洋与渔业环境监测中心,广东 广州 510235)
徕卡Scanstation C10扫描仪扫描质量影响因素分析
欧江霞1,2,刘伟诚1,蔡茂欣3
(1.广东天信电力工程检测有限公司,广东 广州 510663;2.广州市地质调查院,广东 广州510440;3.广州市海洋与渔业环境监测中心,广东 广州 510235)
基于徕卡Scanstation C10扫描仪的坐标测量原理及其测量精度,分析了扫描角度与扫描距离对点位误差的影响情况;利用该仪器按照设计的实验方案进行数据采集,之后提取所获点云的强度数据,并以强度平均值为指标研究了扫描角度、扫描距离、反射体材质对强度值的影响情况。综合研究表明,徕卡Scanstation C10扫描仪的最佳扫描角度为[0°,20°]、最佳扫描距离为[15 m,40 m]、最佳扫描材质为反射率较高的标准反射体。
测量精度;点位误差;强度值;几何条件;反射体

随着地面三维激光扫描仪被广泛应用于工程测量领域[1-3],如何提高其扫描质量也引起了各方面的重视[4-5]。在仪器自身误差及扫描环境等因素影响下,地面三维激光扫描仪扫描获取的点云数据不可避免地含有仪器误差、外界环境误差、扫描几何条件误差以及反射体误差等各种偶然误差[6]。其中,仪器误差可通过仪器校正与仪器内部设置进行修正,外界环境误差可通过测定扫描仪作业时的温度、湿度、压强等一系列环境因子,利用改正公式计算改正数,进而得到修正,因此以上两种误差可看作“固定误差”,相对而言可得到较好控制,而对于扫描几何条件误差(扫描角度、扫描距离)及反射体误差(反射体均质性、颜色)等“浮动误差”则较难进行量化处理。近年来,国内外相关学者在一定范围内研究了扫描角度[7-8]、扫描距离[9]、反射体材质[10]、反射体颜色对扫描质量的影响情况[8-9],但由于市场上仪器众多,各仪器内部结构、扫描特性均存在一定差异性,已有研究成果不具备普适性。为此,本文将基于徕卡Scanstation C10扫描仪的测量精度定量分析扫描几何条件对点位误差的影响,同时通过设计实验方案进行点云数据采集,研究反射体材质对该仪器扫描质量的影响,拟为其扫描设站与反射体选材提供参考,以提高扫描质量及点云数据可靠性。
1 点位误差分析
徕卡Scanstation C10扫描仪采用极坐标法的方式进行坐标测量,目标点P的三维坐标计算公式如式(1)所示:
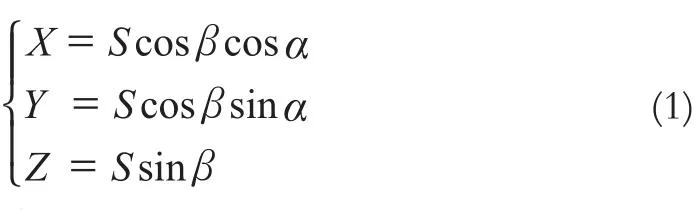
式中,S为扫描距离;α为扫描横向角度(水平角);β为扫描纵向角度(竖直角)。在无仪器误差、外界环境误差等因素的理想情况下,由式(1)及误差传播定律可推导出点云坐标误差分量为:

式中,mx为x方向的点位误差;my为y方向的点位误差;mz为z方向的点位误差;mβ为竖直角测角中误差;mα为水平角测角中误差,mS为测距中误差。由式(2)可推导出点云坐标点位误差mp2为:

徕卡Scanstation C10地面三维激光扫描仪的水平角、竖直角测角精度为mα=mβ=12",测距精度为mS=4 mm。实际作业中,需考虑扫描角度对测距精度的影响,以平面为例,其测距精度与扫描角度θ的关系为 mS=4 mm/cosθ[11]。为研究距离与竖直角、距离与水平角对点位误差的影响,依次令水平角α=0°(此时扫描角度θ=β、mS=4 mm/cosβ)、竖直角β=0°(此时扫描角度θ=α、mS=4 mm/cosα),分别计算不同距离、不同角度(水平角或竖直角)点云点位误差 ,结果如表1、2所示(表中点位误差单位为mm)。
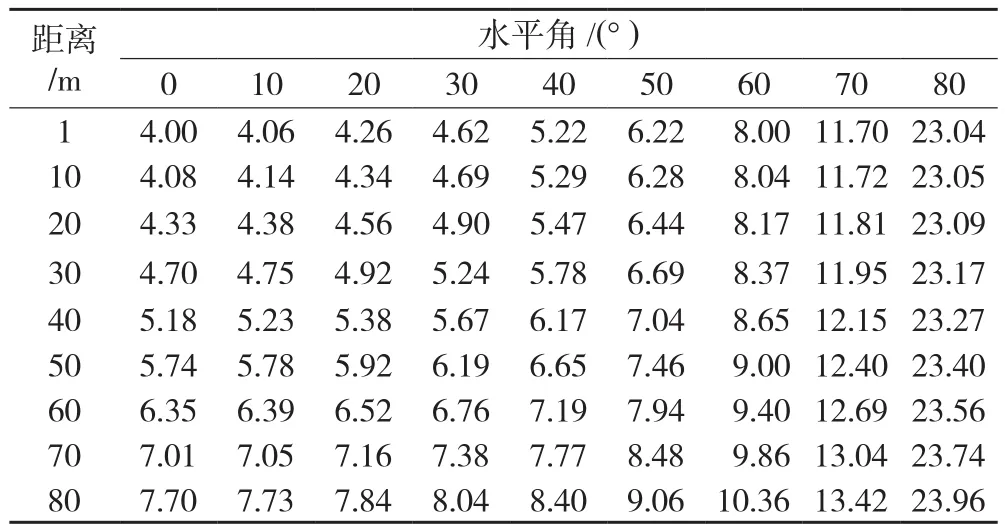
表1 距离与水平角对点位误差的影响
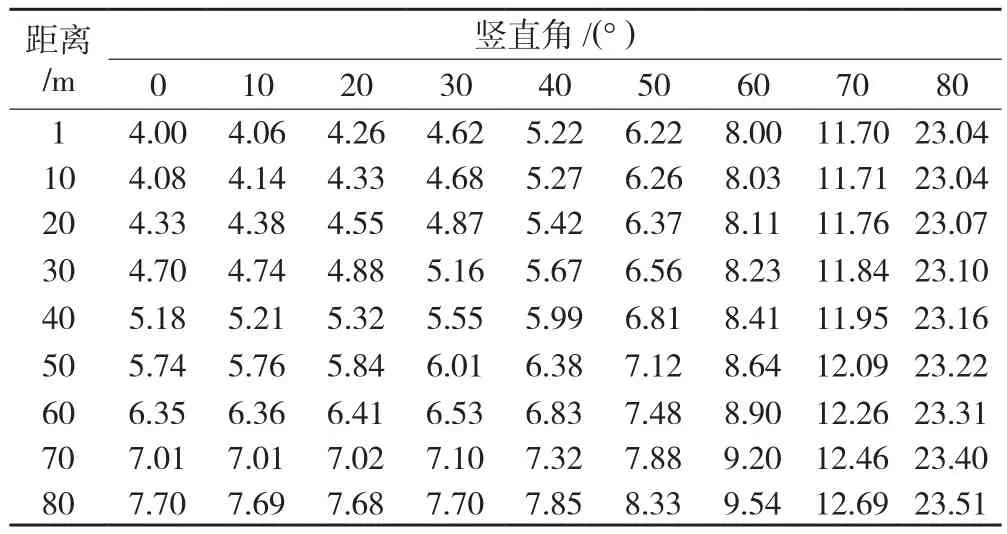
表2 距离与竖直角对点位误差的影响
由表1、2可知:
1)当距离S固定、竖直角β=0°时,点云点位误差随水平角 增加逐渐变大。
2)当距离S固定、水平角α=0°时,点云点位误差也随竖直角 增加逐渐变大。
3)当距离S固定,扫描角度小于40°(水平角α<40°或竖直角β<40°)时,点位误差的变化幅度在1 mm以内,扫描角度大于40°时,点位误差呈明显上升趋势。
4)当扫描角度(水平角α或竖直角β)固定时,点云点位误差同样随距离S增加逐渐变大,其中,当距离S<40 m时,点位误差的变化幅度在1 mm以内,距离S>40 m时,点位误差呈缓慢上升趋势。
由以上分析可知:
1)扫描角度是影响点位误差的主要因素,实际作业时,应尽量使扫描仪正对扫描目标,以减少扫描角度对点位误差的影响,当对大型物体进行扫描时,应尽量确保扫描角度小于40°。
2)徕卡Scanstation C10地面三维激光扫描仪作业时应将扫描距离S控制在40 m以内,以减小距离对点位误差的影响,提高扫描质量。
2 强度值分析
地面三维激光扫描仪在获取扫描目标空间几何信息(相对三维坐标)的同时,还记录了扫描目标的物理信息——强度值,即接收器接收到的回波信号。参考雷达测距方程,同时顾及激光光束反射系统与接收系统同轴,且发射器与探测器跟扫描目标的距离一致等因素,地面三维激光扫描仪激光回波能量与发射能量之间关系如下[12]:

式中,P为激光接收功率;P为激光发射功率;D2RES为接收光孔孔径;S为扫描仪与扫描目标之间的距离;ρ为扫描目标发射率分别为大气与仪器的能量传输因素,θ为扫描角度。强度值I为PR的函数,即I=f (PR),可表示为:

由式(5)可知,点云强度值精度也与扫描距离S、扫描角度θ、扫描目标反射率(反射体材质)存在一定关系。由于强度值I与PR的函数关系未知,无法对强度值精度进行定量分析,为此,本文将利用徕卡Scanstation C10地面三维激光扫描仪扫描尺寸为30 cm×30 cm×3 cm的不同角度、不同距离、不同材质的平面反射体,以强度平均值作为精度评定指标,研究扫描角度、扫描距离、反射体材质对点云强度值的影响。实验分为以下3部分:
1)扫描角度对强度值影响实验。由于反射体尺寸较小、扫描距离较大,因此,可忽略竖直角影响,重点考虑水平角对强度值的影响(即令扫描角度θ=α),通过固定扫描距离与反射体材质,不断调整加入水平度盘旋转基座的方式改变扫描角度,采集目标点云数据。
2)扫描距离对强度值影响实验。固定扫描角度与反射体材质,通过变化扫描距离采集目标点云数据。
3)反射体材质对强度值影响实验。固定扫描角度与扫描距离,分别采集标准反射体、5种颜色KT板材反射体与建筑材料反射体点云数据。
2.1 扫描角度对强度值影响
如图1所示,将徕卡Scanstation C10地面三维激光扫描仪分别放置在距离扫描目标20 m、30 m的位置,通过旋转基座将反射体(本次实验选用扫描目标为反射率55%的标准反射体、混凝土反射体及黄色KT板材反射体)的角度依次设置为0°~80°(步长为10°),利用扫描仪依次扫描不同角度下3种反射体,共得到18组点云数据,分别统计所得点云数据的强度平均值,如图2、3所示。
1)对于3种不同类型的反射体,当扫描距离固定时,反射体的强度平均值均随扫描角度的增加而降低,说明扫描角度越大,反射体接收到的激光信号越弱。
2)对于反射率55%的标准反射体,其强度平均值先缓慢变小,当扫描角度超过20°时,其强度值以抛物线形式急剧减小。
3)混凝土反射体均质性较差、反射率较低,其强度平均值呈平缓变化趋势。
4)黄色KT板材反射体的均质性好、反射率高,对激光信号极为敏感,当扫描仪正对其进行扫描时,可获得高于其他两种反射体强度值,当扫描角度变大时,其强度值以近似线性形式急剧减小,当扫描角度大于60°时,其强度值低于其他两种反射体。
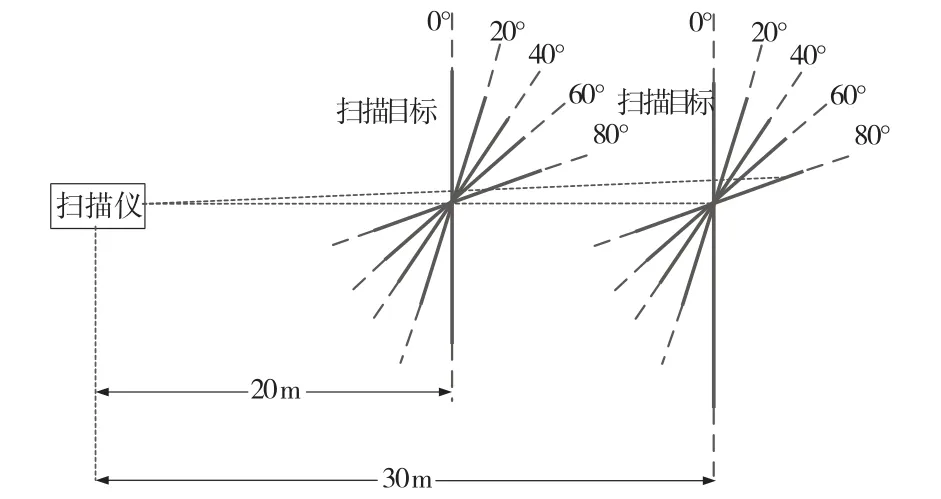
图1 扫描角度实验
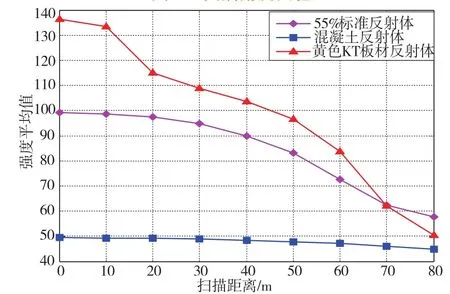
图2 扫描距离为20 m时点云强度平均值变化曲线
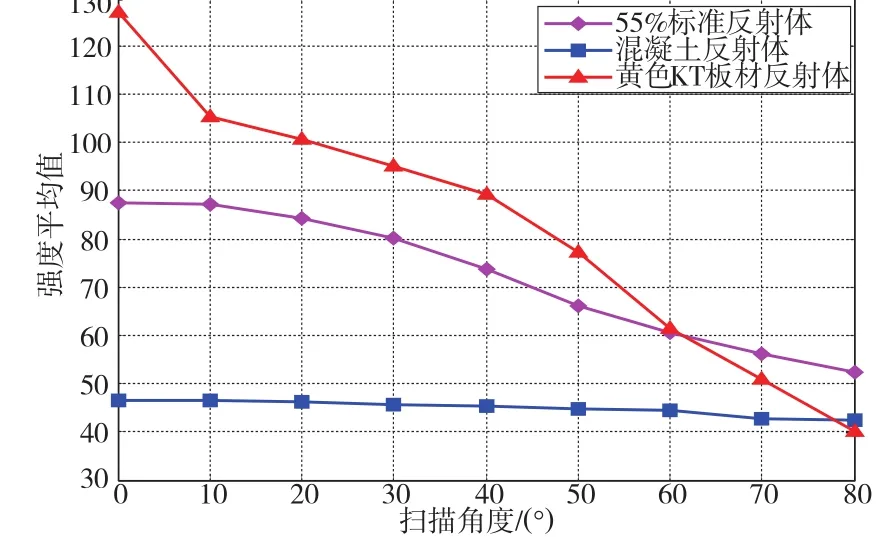
图3 扫描距离为30 m时点云强度平均值变化曲线
2.2 扫描距离对强度值影响
如图4所示,将徕卡Scanstation C10地面三维激光扫描仪依次架设在正对扫描目标(本次实验选用扫描目标为反射率55%标准反射体、混凝土反射体及黄色KT板材反射体)的位置(扫描角度为0°),扫描距离设置为1 m、5~70 m(步长为5 m),利用扫描仪依次对不同扫描距离下的3种反射体进行扫描,共得到30 组点云数据,分别统计所得数据的强度平均值及强度值中误差,如图5所示。
当扫描角度固定时,由图5可得:
1)由于受仪器内部近距离信号衰减器的影响,激光信号在[1 m,15 m]区间较弱,但随着距离逐步增加,近距离信号衰减器作用减小,激光信号变强,因此,反射率55%的标准反射体及混凝土反射体在[1 m,15 m]区间、黄色KT板材反射体[1 m,10 m]区间的强度平均值随扫描距离增加而变大;
2)当扫描距离大于15 m时,激光信号越来越弱,3种反射体的强度平均值逐渐变小,其中标准反射体、黄色KT板材反射体的变化较为明显;
3)当扫描距离大于50 m时,3种反射体的强度平均值趋于稳定,说明当扫描距离到达一定程度时,由于激光信号太弱,仪器扫描获取目标表面信息的能力也相应降低。
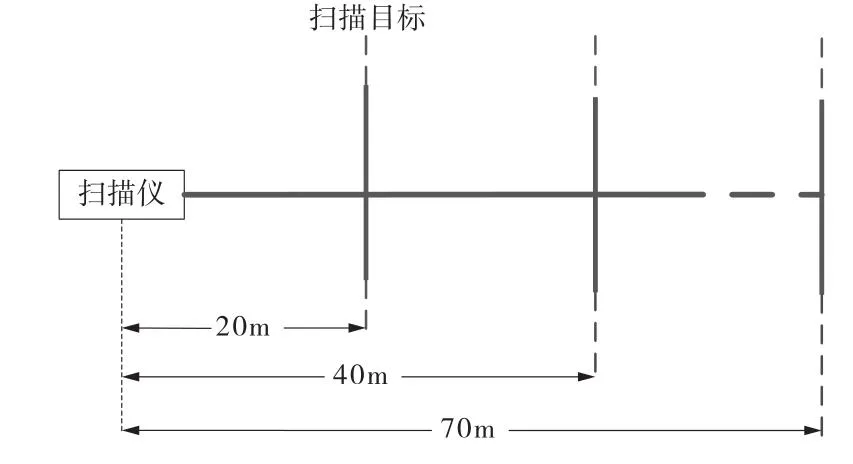
图4 扫描距离实验
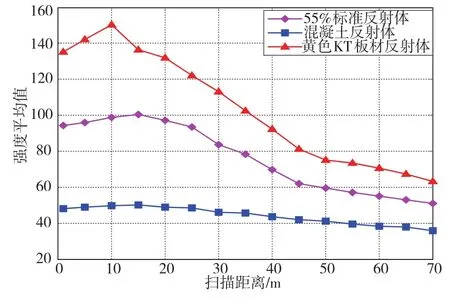
图5 扫描角度为0°时点云强度平均值变化曲线
2.3 反射体材质对强度值影响
本次实验选用的扫描目标物体为反射率为35%与55%的标准反射体、混凝土与大理石等建筑材料反射体、5种不同颜色(红、黄、绿、青、蓝)的同质KT板材反射体。如图1所示,将徕卡Scanstation C10地面三维激光扫描仪分别放置在距离扫描目标20 m、30 m的位置,通过旋转基座将反射体的角度依次设置为20°、30°,利用扫描仪依次扫描不同角度下3类反射体,共得到30组点云数据,分别统计所得点云数据的强度平均值,如图6所示。
1)由于反射率为55%的标准反射体比反射率为35%的标准反射体反射率高,拥有较好反射性,因此其可在不同距离、不同角度的情况下均能获得较大强度平均值。
2)因为黄光(波长为597~577 nm)、绿光(波长为577~492 nm)、青光(波长为492~450 nm)的波长相较于红光(波长为770~622 nm)、蓝光(波长为450~435 nm)与实验所用扫描仪使用波长为532 nm的绿光波长更为接近,对绿光较为敏感,表现出较好的反射性,因此,在不同扫描条件下,黄色、绿色、青色KT板材反射体的强度平均值均比红色、蓝色KT板材反射体大。

图6 反射体材质实验结果
3)对于混凝土反射体与花岗岩反射体,由于花岗岩的均质性较好,因而其强度平均值大于混凝土反射体。
4)综合以上分析可知,反射强度值与反射体的反射率及均质性有关,对于徕卡Scanstation C10地面三维激光扫描仪,当利用其进行实际作业时应尽量采用反射率较高的标准反射体,缺少标准发射体时,可采用与扫描仪激光颜色波长相近的反射体,同时,当扫描建筑材料时,应挑选均质性较好的建筑材料作为扫描目标,以保证扫描质量。
3 结 语
1)基于徕卡Scanstation C10扫描仪的坐标测量原理及测量精度。分析了扫描距离与扫描角度对点位误差的影响情况。研究表明,当扫描角度小于40°、扫描距离小于40 m时,点位误差可得到较好控制。
2)利用徕卡Scanstation C10扫描仪按照设计方案进行数据采集,之后提取所获点云的强度数据,并以强度平均值为指标,研究了扫描角度、扫描距离、反射体材质对强度值的影响情况。实验结果表明,当扫描角度小于20°、扫描距离在[15 m,20 m]区间、反射体反射率较高时,可获得较为可靠的强度值。
3)本文研究表明,利用徕卡Scanstation C10扫描仪进行扫描作业时,为获取较高精度的点云数据,应将扫描角度控制在[0°,20°]、扫描距离控制在[15 m,40 m],同时应尽量选用反射率较高的标准反射体作为扫描目标。
4)仅从理论上分析了点云点位精度与距离、角度(水平角、竖直角)的关系,同时未分析反射面材质对点位精度产生的影响,因此可在以后研究中综合利用地面三维激光扫描仪与全站仪、经纬仪、GPS等其他测量仪器对点位精度影响因素作系统性研究。
[1] STROUTH A,BURK R L,EBERHARDT E. The Afternoon Creek Roekslide Near Newhalem, Washington[J].Landslides, 2006,3(2):175-179
[2] 习晓环,骆社周,王方建.地面三维激光扫描系统现状及发展评述[J].地理空间信息,2012(6):13-153
[3] 陈静,李清泉. 激光扫描测量系统的应用研究[J].测绘工程,2001(1):49-52
[4] 欧江霞,李明峰, 王永明.基于稳健加权总体最小二乘的点云数据平面拟合[J].大地测量与地球动力学,2014(6): 160-163
[5] 李明峰,欧江霞,檀丁.加权总体最小二乘点云平面拟合定权方法探讨[J].大地测量与地球动力学,2015(6): 428-432
[6] 郑德华,沈云中,刘春. 地面三维激光扫描仪及其测量误差影响因素分析[J].测绘工程,2005(2):32-34
[7] YANG Yaoquan,SHI Ren,YU Xining. Laser Scanning Triangulation for Large Profile Measurement[J]. Journal of Xi'an Jiaotong University,1999(7):17-20
[8] BOEHLER W,VICENT M B,MARBS A.Investigating Laser Scanner Accuracy[J]. Proceedings of Xixth Cipa Symposium, 2003(10):696-702
[9] HERBERT M,KROTKOV E.3D Measurements from Imagine Laser Radars:How Good Are They?[J]. Image and Vision Computing,1992,10(3):170-178
[10] 黄小川,郑慧.地面三维激光雷达点云误差分析及校正方法[J].地理空间信息,2009(5):95-97
[11] GRANT D,BETHEL J,CRAWFORD M. Point-to-Plane Registration of Terrestrial Laserscans [J] .Isprs Journal of Photogrammetry & Remote Sensing,2012,72(6):16-26
[12] WAGNER W,ULLRICH A,DUCIC V,et al. Gaussian Decomposition and Calibration of A Novel Small-footprint Full-waveform Digitising Airborne Laser Scanner[J]. Isprs Journal of Photogrammetry & Remote Sensing,2005,60(2):100-112
P247
B文章编号:1672-4623(2017)06-0103-04
10.3969/j.issn.1672-4623.2017.06.032
欧江霞,硕士,主要研究方向为大地测量数据处理方法研究。
2015-12-23。
项目来源:国家自然科学基金资助项目(41274009)。
猜你喜欢
指挥控制与仿真(2022年4期)2022-08-19
装备制造技术(2021年4期)2021-08-05
无损检测(2019年7期)2019-07-25
模具制造(2019年3期)2019-06-06
制造技术与机床(2018年12期)2018-12-23
指挥控制与仿真(2018年3期)2018-06-11
系统工程与电子技术(2016年11期)2016-11-11
测绘科学与工程(2016年4期)2016-04-17
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
