
提高无人机高程精度的影像获取方法
2017-06-26 17:58温成龙张兆江商洋洋
地理空间信息 2017年6期
温成龙,张兆江,2,商洋洋
(1.河北工程大学 资源学院,河北 邯郸 056000;2.河北省煤炭资源综合开发与利用协同创新中心,河北 邯郸 056000;3.河北博翔地理信息技术有限责任公司,河北 邯郸 056000)
提高无人机高程精度的影像获取方法
温成龙1,张兆江1,2,商洋洋3
(1.河北工程大学 资源学院,河北 邯郸 056000;2.河北省煤炭资源综合开发与利用协同创新中心,河北 邯郸 056000;3.河北博翔地理信息技术有限责任公司,河北 邯郸 056000)
近年来,无人机技术在大比例尺地形测量领域得到了广泛应用,但受基高比小、飞行姿态不稳定等因素的影响,无人机成图的高程精度有时难以满足规范要求。通过分析基高比和航片姿态对高程精度的影响,提出了新的影像获取方案。通过与传统方案进行实验对比分析,结果表明,在保证平面成图精度与传统方案基本一致的基础上,高程中误差降低了30.4%,高程检查点超限的个数减少了74%,提高了无人机的高程精度。
无人机;高程精度;基高比;航片姿态

无人机摄影测量作为新兴的测绘手段,具有机动灵活、经济高效等特点[1],近年来在测绘行业得到了广泛应用,特别是在小区域大比例尺测图领域。但由于无人机体积小、重量轻,空中飞行姿态受气流影响,容易造成航摄像片倾角过大[2];而且无人机采用小型数码相机,像幅较小,相应的基高比也小,导致无人机摄影测量高程精度有时难以满足相应的国家规范要求[3],因而如何提高无人机摄影测量的高程精度成为目前关注的重点。为此,在分析基高比和航片姿态对高程精度影响的基础上,针对无人机航测特点提出了一种新的影像获取方案,该方案可有效提高无人机摄影测量成图的高程精度,对无人机在大比例尺地形测量领域的推广具有一定意义。
1 高程精度主要影响因素分析
1.1 基高比对高程精度的影响
基高比(G)是摄影基线(B)与航高(H)之比,反映的是相邻两个摄站对地面点的交会角[4]。当量测精度一定时,由于无人机交会角较小,基高比会影响立体采集时的高程精度,如图1所示,假设右张影像的量测误差为δ,引起的高程误差为Δh,由于f很小,可认为H+f≈H,根据三角形相似原理可得:

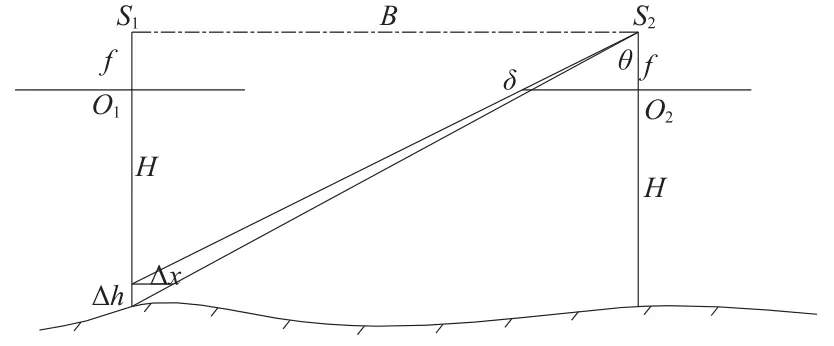
图1 基高比对高程精度的影响
另由图1可知:

式(1)、(2)联立可得基高比引起的高程误差:

量测误差δ与影像的分辨率有关,一般为半个或一个像元。由上式可知,当相机确定后,焦距f和量测误差δ认为是定值,高程误差Δh与基高比G成反比,与航高H成正比;而基高比G会随着影像重叠度的增加而减小,故当航高H确定时,高程误差Δh与重叠度成正比。
1.2 航片姿态对高程精度的影响
目前,航测多以近似垂直摄影为基础,每张航片用3个角元素来描述其空间姿态,即俯仰角ψ、侧滚角ω和航偏角κ。当航片处于标准状态(垂直摄影)时,航片内任意一点a坐标为(x,y);但实际航飞通常存在一定倾角,获得的影像会产生像点偏移,即a点移动到a′点,坐标为(x′,y′)。二者可相互转换:

式中,λ为缩放系数;R为旋转矩阵。
像点偏移会影响左右视差p,进而对高程精度产生影响。对于标准立体像对,A点航高为:

式中,p0为标准像对左右视差;H0A为标准像对A点航高。
在近似垂直摄影中,由于倾斜航片相对于标准航片相应像点会发生位移,需要对倾斜像对的左右视差加上改正数δP,以得到标准像对的左右视差p0:进而求得左右视差改正数δP,精确到一次项为[5]:


这样,就把带有像片倾角的Δp改化为标准像对下的Δp0。如果未进行此项改化,将会使立体模型的高程出现扭曲变形,进而影响地形图的高程精度。根据式(3),由δΔP引起的高程误差计算公式为[6]:

式中,H0为左张影像相对起始面的航高;ΔH为航高差;x′和y为右张航片的像点坐标;ψ1为右张影像的俯仰角;ω为左张影像的侧滚角;Δφ=φ1-φ,Δκ=κ1-κ,Δω=ω1-ω。
当航飞方案确定后,公式中有两组变量,分别为(ψ1,ω,Δω,Δκ,ΔH)和(x′, y)。在两张航片的外方位元素已知的情况下,第一组变量为定值,立体模型各处高程误差为双曲抛物面[6],如图2所示。

图2 立体模型高程扭曲
图中,水平面为立体模型的高程真值,曲面为误差曲面,在两张航片的外方位元素已知的情况下,高程误差与(x′,y)的取值有关,其中4个角点误差最大,相邻角点的误差方向相反。反之,(x′,y)给定后,取不同的第一组变量代入式(5)中可得到给定点的高程误差与航片倾角的关系。
2 影像获取方案和剔除原则
2.1 曝光方式的选择
目前数码相机的曝光方式分为3种:定点曝光、等距曝光和等时间间隔曝光。采用定点曝光时,无人机在受到外界影响时会偏离航线错过曝光点,容易漏飞;采用等时间间隔曝光时,无人机在风力影响下,往返飞行两条航带所用时间不一致,相邻两条航带的重叠度有差异。为了避免以上两种曝光方式的不足,方案采取等距离间隔曝光,以便控制航片的重叠度。
2.2 航飞重叠度的选取
目前,《低空数字航空摄影规范》对飞行质量规定如下[6]:
1)航向重叠度一般应在60%~80%之间,最小应大于53%;旁向重叠度一般应为15%~60%,最小不小于8%。
2)像片倾斜角一般不大于5°,最大不超过12°,出现超过8°的片数不多于总数的10%。
航飞成果即使满足以上要求,也经常出现高程精度超限的情况,为此设计航向重叠度为90%,得到的航片数量是重叠度为70%的2倍,考虑到基高比对高程的影响,需按一定原则剔除2/3左右的航片,在保证重叠度(约70%)的前提下,得到姿态理想的航片。旁向重叠度按规范要求即可。
2.3 航片剔除原则
当重叠度设计为90%时,需要对航片进行选择,根据规范和航片姿态对高程精度的影响分析,制定航片选择原则如下:
1)保证相邻两张影像的重叠度在60%~80%之间,不出现影像覆盖不到的区域,同时基高比适中。
2)在保证重叠度的基础上,剔除航片倾角超限、模糊的影像。
3)任意给定(x′,y)值,根据高程扭曲公式中δh的大小对航片进行挑选。
将航飞成果中每张照片的POS参数代入式(5),计算δh,根据以上筛选原则挑选较为理想的航片可有效提高无人机航测成图的高程精度。
3 实验及结果分析
3.1 测区概况
测区位于武安市郊区某矿的井田区域,选取工业广场所在的第六架次作为实验区,大小为1.2 km×1.9 km。第六架次航飞区域北部为梯田,中部是建筑物密集的村庄,南部有一些零散工厂分布,公路和铁路从中穿过。测区地形类别属丘陵地貌,平均高程150 m,最大落差约25 m。
3.2 实验方案
3.2.1 作业方案
本测区成图比例尺为1∶1 000,采用台湾碳基Avian-P无人机进行航飞,摄影相机型号为SONY ILCE-7R,飞行速度为70 km/h,续航时间为80 min。
在同一作业区域采用传统航飞方法和论文设计的方法飞行两个架次,采用相同像控点布控方案。传统航飞方案(方案一)得到264张航片,论文设计方案(方案二)经筛选后得到278张航片。
3.2.2 控制点布设
坐标系统采用1954年北京坐标系(应矿方要求),高程系统采用1985国家高程基准,等高距为1 m。两种航飞方案采用相同的控制点布设方法:航带内每6 条基线布设一个控制点,航带间间隔一条航带布设。控制点均为平高控制点,采用GPS-RTK方法进行数据采集。
3.3 数据处理与精度分析
3.3.1 空三加密
采用武汉航天远景公司的DATMatrix2.0软件进行空三加密处理,主要工作包括影像内定向、自动转点和光束法平差解算,获取内业测图所需的每张影像的外方位元素和加密点坐标。
3.3.2 精度统计
应矿方要求,成图精度满足《工程测量规范》要求[7],平面位置中误差为0.6 m,高程中误差为0.5 m,限差均为2倍中误差。
为全面准确反映空三加密成果精度,测区内检查点采用格网布设方式,格网平均间距为100 m,共布设高程检查点213个,平面检查点89个。精度统计如表1。
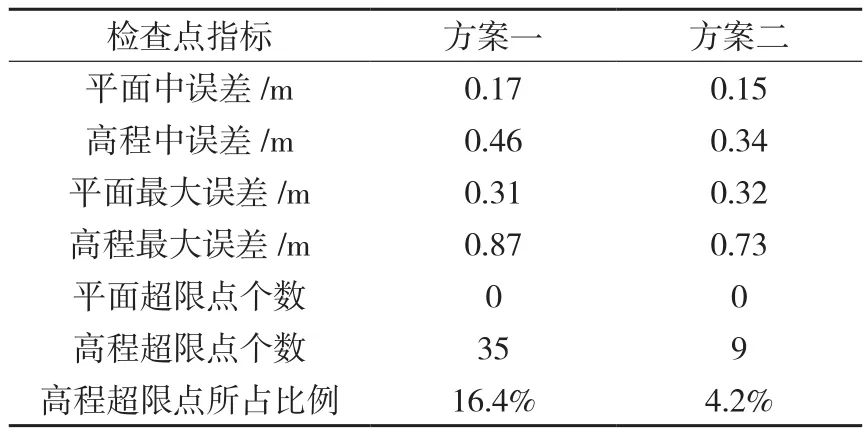
表1 检查点精度结果统计
通过表2可以看出,方案一与方案二空三加密成果的平面中误差和平面最大误差值较为接近,表明两种方案平面精度差异不大;而两种方案高程精度差异较为明显,方案一高程中误差比方案二降低了30.4%,高程最大误差值也较方案二小,相应的高程检查点超限的个数也明显减少,表明新的影像获取方案能在保证地形图成图平面精度的同时,较好地提高了高程精度。
4 结 语
近年来采用无人机进行大比例尺地形测量方兴未艾,但无人机飞行姿态不稳定造成的高程精度较差一定程度上制约了其在更广泛领域的应用。本文通过增大航飞影像的重叠度,并对航片进行合理筛选,在控制重叠度的前提下剔除对高程精度影响大的航片,进而保证成图精度。实验结果表明,采用新的影像获取方案可以得到较为理想的航片,平面精度可以满足1∶1 000的要求,相比于传统航飞方法,高程精度有较大幅度提高。
[1] 陈姣.无人机航摄系统测绘大比例尺地形图应用研究[D].昆明:昆明理工大学,2013
[2] 吴巧玲,董祥林,高宇.利用高程二次定向提高无人机航测高程精度的探讨[J].测绘通报,2011(7):12-14
[3] 连镇华.无人机航摄相片倾角对立体高程扭曲的影响分析[J].地理空间信息,2010,8(1):20-22
[4] 范业稳.基于DMC的航空摄影测量误差分析和质量控制方法研究[D].武汉:武汉大学,2011
[5] 黄世德.航空摄影测量学[M].北京:测绘出版社,1987
[6] CH/Z_3005-2010.低空数字航空摄影规范[S].
[7] GB50026-2007.工程测量规范[S].
P231
B文章编号:1672-4623(2017)06-0038-03
10.3969/j.issn.1672-4623.2017.06.011
温成龙,硕士研究生,主要从事摄影测量工作。
2015-07-16。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
当代陕西(2020年23期)2021-01-07
国际呼吸杂志(2019年4期)2019-03-12
电子制作(2018年11期)2018-08-04
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
测绘科学与工程(2016年5期)2016-04-17
现代计算机(2015年31期)2015-09-28
全球定位系统(2015年4期)2015-02-28
电子设计工程(2015年3期)2015-02-27
