
基于51单片机的远程操控清洁船设计与控制系统
2017-06-26 07:49:18范汝健莫泽生庄宇业杨国强陈洪健刘炯廖志青
装备制造技术 2017年5期
范汝健,莫泽生,庄宇业,杨国强,陈洪健,刘炯,廖志青
(华南理工大学广州学院,广东广州510800)
基于51单片机的远程操控清洁船设计与控制系统
范汝健,莫泽生,庄宇业,杨国强,陈洪健,刘炯,廖志青
(华南理工大学广州学院,广东广州510800)
当前,治理污染水域已经得到了社会各方面的大力关注。随着科技的进步和人们对自然环境保护要求的不断提高,研究一种结构简单、安全平稳、效率高的远程操控清洁清洁船成为一大热点。为了解决小型湖泊,河流等地区水面垃圾问题,实现在大型湖面的水面垃圾清扫效果,该清洁船在AT89C51单片机的基础上,在功能中融合了无线远程操控,智能识别目标,无线图像传输,清洁自动化,远程监控反馈等功能,且对湖水的水质无干扰与污染。目前主要针对水面漂浮物将其聚集、收拢、压缩、运送、装载,全过程无需人工,靠船体本身自动化完成任务,节约能源,不对环境造成污染
AT89C51单片机;清洁船;设计原理;控制系统
目前我国存在大型海面垃圾清扫工具,且清扫效果明显,对水面质量有较大改善,但由于船体体积较大且大多为石油提供动力,所以无法清扫面积较小的湖泊,小溪且对自我调节能力低的湖泊水质有一点干扰,根据这种情况生产适用于面积较小的水面且能源清洁的智能清洁小船。该远程操控水面漂浮物清洁船增加了无线控制系统,实现了清洁船的远程操控,简化了水面漂浮物清洁工作。通过无线操控系统设定它的前进方向,收集范围扩展臂的扩展范围以及控制滚筒的工作开关,以完成水面清洁工作。见图1.
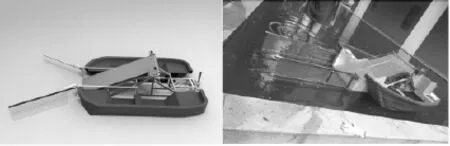
图13 D设计构思图与水中作业实物
1 主要技术指标
基于51单片机的远程操控清洁船的基本参数如下表1所示。
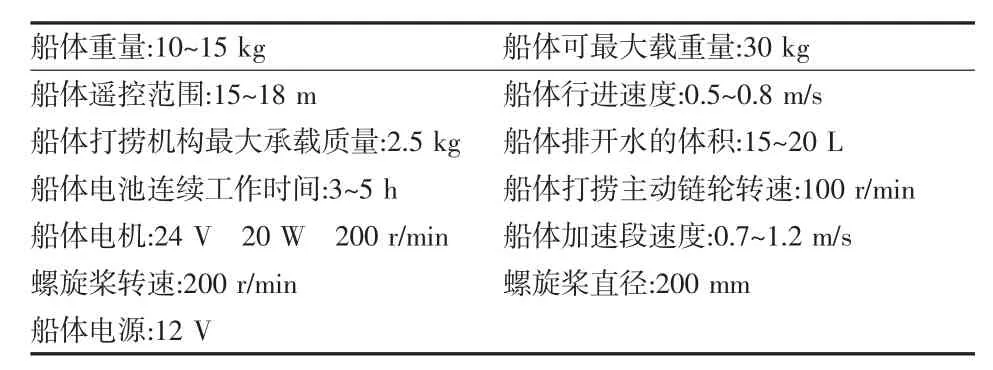
表1 船体基本参数
清洁船主要的特点:
(1)打捞工作难度和劳动强度小,同时拥有效率高、安全隐患小等有利因素。
(2)无需依赖人力和人工驾驶方式。体积小,经济环保且适用于面积较小的水面区域实施打捞作业。
(3)发生的状况可以实时显示在手机上,
(4)智能识别目标、清洁自动化
2 总体结构
如图2所示,该远程操控清洁船增加无线控制系统,实现了清洁船的远程操控,简化了水面漂浮物清洁工作。通过无线操控系统设定它的前进方向,收集范围扩展臂的扩展范围以及打开滚筒的工作开关,就可以完成水面清洁任务。
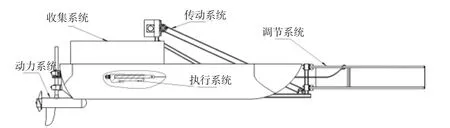
图2 船体设计图
2.1 动力系统
图3动力系统结构中,船体运动驱动部分由一个ET54水下电机组成,船体转向部分由一个JX PDI-6221MG 20KG 180度金属齿数码舵机组成,输送带运动部分由一个减速电机组成,收集范围扩展臂驱动部分由一个直线电机组成。
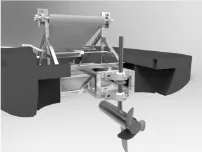
图3 船体动力系统
2.2 收集系统
收集系统是由输送带带以及收集箱组成,输送带的作用为:打捞系统实现的功能是将垃圾从水面捞进收集箱。打捞机构采用两条不锈钢链条,在链节上有固定板。左右固定板上连接有铝板作为支撑板。
2.3 传动系统
整个船的传动系统由减速电机带动传送带,其中舵机与水下电机是在同步带轮中进行传动,输送带的滚筒与减速电机是通过链条进行传动,全程通过电力进行维持工作,由蓄电池提供原动力,有齿链条结合,保证每个部位传送达到最高效率。
2.4 调节系统
船体转向驱动中,直线电机与收集范围扩展臂的传动是通过连杆的方式实现的。当面对水面垃圾分布较散或较为集中的地区时,也考虑到船体的传送带的负载极限,可以进行人为操控进行适当调节扩展臂的范围,达到收集的最佳效率。
2 控制系统设计
2.1 整个船控制方案
船用单片机为STM32F103,以此为操控系统,主要控制Nrf2401无线数字传输芯片,进行传输图像和各类数据等信息,进行反馈给操作员。该船体控制方案是根据电机,减速器,发射器等模块构成。通信方式由信息传输方式由两端采用半双工方式通信,通过无线控制控制模块,在手机等指令发生器上发出清洁船的对应运动指令,对应的无线模块会将信号进行转换和传递,让电机,减速器,发射器等相应机构作出对应指令动作。如当我们在远处发出传送带运动命令时,无线模块会将信号传递至51单片机控制板上,再由51单片机控制板控制传送带的运动电机上,使电机转动,达到传送带运动的效果。当中的工作原理是人为操作信号发射器做出相应调整,无线模块将信号传递到51单片机上,单片机根据信息做出相应处理。传递信号到电机,减速器等相应机构后,船运动做出相应更改,满足不同情况下的需求,进行不同的实施方案。
船体控制以AT89C51单片机为主,部分用51单片机控制,结合不同需求。见图4.
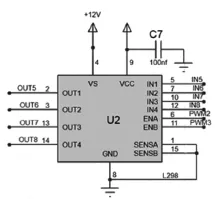
图4 电机控制模块
2 电机控制模块
图5为总电路图,控制芯片的作用主要是与L289相连接驱动直流电机,以及与八位数码显。AT89C51是一种带4K自己FLASH存储器的低压、高性能CMOS8为微处理器。单片机的可擦除只读存储器可以反复擦除1000次。该器件采用ATMEL高密度非易失真存储制造技术制造,与工业标准的MCS-51指令集和输出关键相兼容。由于将多功能8位CPU和闪存组合在单个芯片中,ATMEL的AT89C51是一种高效微控制器,所以AT89C51单片机为很多嵌入式控制系统提供了一种灵活性奥高且廉价的方案。
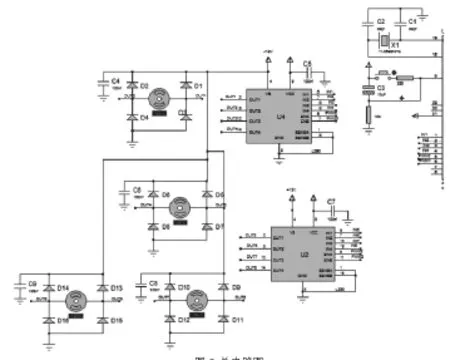
图5 总电路图
3 技术关键
由于51单片机不能够驱动大电流电机所以需要外接驱动,本次用的是L298N大电流驱动,L298N是专用驱动集成电路,属于H桥集成电路,与L293D的差别是起输出电流增大,功率增强。其输出电流为2 A,最高电流4 A,最高工作电压50 V,可以驱动感性负载,如大功率直流电机,步进电机,电磁阀等等,特别是其输入端可以与单片机直接相连,从而很方便地受单片机控制。当驱动直流电机时,可以直接控制步进电机,并可以实现电机的正转和反转,实现此功能只需要改变输入端的逻辑电平。为了避免电机对单片机的干扰,本模块加入光耦,进行光电隔离,从而使系统能够稳定可靠的工作。
4 结束语
清洁船已经在华南理工大学广州学院人工湖尝试作业,清洁效果良好,水面漂浮垃圾如塑料等白色污染经清扫基本清除,项目达到预期目标,但需要改进收集装置。
现如今水面垃圾大多数为塑料制品,水面大多都被“白色污染”占满,对水质量有极大的污染。我们所消耗的每一片塑料,都有可能流入江河湖。如果再不采取措施,环境将无法负荷,而大家也将无法生存。该清洁船的设计简便,体型小,适用于各个水域,所带来的效益是无法估算的。
[1]李宝筏,农业机械学,中国农业出版社,2003.
[2]赵连恩.主编,高性能船舶水动力原理与设计,哈尔滨:哈尔滨工程大学出版社,2001.
[3]魏立峰,单片机原理与应用技术,北京:北京大学出版社,2006.
[4]何伟文,浅谈水面垃圾清扫船,广东:广东造船,1998.
The Design and Application of Remote Control Cleaner Based on 51 Single-Chip Microcomputer
FAN Ru-jian,MO Ze-sheng,ZHUANG Yu-ye,YANG Guo-qiang,CHEN Hong-jian,LIU Jiong,LIAO Zhi-qing
(Guangzhou College of South China University of Technology,Guangzhou Guangdong 510800,China)
For the realization of the function,based on AT89C51 single-chip the cleaning ship is an integration of the ship,communications,automation,robot control,remote monitoring,network systems and other technologies to achieve the independent navigation,intelligent obstacle avoidance,long-distance communications,real-time video transmission and network Monitoring and other functions.At present,the technology is mainly used for gathering,assembling,compressing,transporting and loading of the floating objects on the surface.The whole process will complete automatically without labor by the hull itself,which is able to conserve energy and produce no pollution to the environment.
AT85C51 single-chip microcomputer;cleaning ship;design principle;control system
TN911
A < class="emphasis_bold">文章编号:1
1672-545X(2017)05-0298-02
2017-02-16
2017年“攀登计划”广东大学生科技创新培育专项资金助
范汝健(1995-),男,广东人,本科,主要研究方向为机械工程及自动化技术。
猜你喜欢
高中数理化(2024年8期)2024-04-24 16:58:14
舰船科学技术(2022年20期)2022-11-28 08:19:52
中学生数理化·高一版(2021年1期)2021-03-19 08:30:02
课外生活(小学1-3年级)(2020年2期)2020-03-09 03:24:26
摄影之友(影像视觉)(2017年8期)2017-11-27 02:08:34
能源(2016年3期)2016-12-01 05:11:02
焊接(2015年9期)2015-07-18 11:03:51
海军医学杂志(2015年2期)2015-02-27 13:47:42
滇池(2014年5期)2014-05-29 07:30:25
中国舰船研究(2014年6期)2014-05-14 06:45:17
