
机电一体化数控技术在机械制造中的应用
2017-06-24 13:27滑雪燕
时代农机 2017年4期
滑雪燕
(阜阳技师学院,安徽 阜阳 236000)
机电一体化数控技术在机械制造中的应用
滑雪燕
(阜阳技师学院,安徽 阜阳 236000)
随着我国工业的快速发展,它对先进制造技术的需求也愈加强烈。文章以机电一体化数控技术为代表,多轴数控机器人结合数字测量为例,阐述了切削型工业机器人对复杂零件加工的完整流程,来证明机电一体化数控技术在机械制造中的新发展和优势。
机电一体化;数控;工业机器人;加工
1 数控技术在工业机器人中的应用
(1)计算机数字技术的简介。数控系统是数字控制系统简称,英文名称为Numerical Control System,早期是由硬件电路构成的称为硬件数控(Hard NC),1970年代以后,硬件电路元件逐步由专用的计算机代替称为计算机数控系统。
计算机数控(Computerized numerical control,简称CNC)系统是用计算机控制加工功能,实现数值控制。CNC系统根据计算机存储器中存储的控制程序,执行部分或全部数值控制功能,并配有接口电路和伺服驱动装置的专用计算机系统。
直接数控(DNC)是直接数控(Direct Numerical Control)的英文简称。它是用电子计算机对具有数控装置的机床群直接进行联机控制和管理,英文缩写DNC。直接数控又称群控,控制的机床由几台至几十台。且直接数控是在数控(NC)和计算机数控(CNC)基础上发展起来的。
微机数控(MNC)是微型计算机数控(Micro-computer Numerical Control)的英文简称。它是指用微处理器和半导体存贮器的微型计算机数控装置。
(2)工业机器人的特点。工业机器人技术是把精密机械技术、检测传感技术和自动控制技术等多项技术于一身的集大成者,具有运行稳定、操作灵活、自由度多等优点,可完成工作强度大、生态环境恶劣、精度要求高、危险性大的各项工作。因此,工业机器人在自动化程度高的领域应用的越来越广泛,比如汽车制造、航天航空和军事装备生产等。
工业机器人的应用有以下特点:①用途广,机器人只要根据工作任务要求配备合适的自由度,就可以胜任大多数的操作工作。②高可靠性、高速度、高精度,有利于提高生产效率,节省加工时间。③灵活、多功能,因操作工具的不同功能也不同,可以实现一机多用。④可重复编程,所有的运动均按程序运行,安全可靠。⑤可用于恶劣、危险的环境,工作质量稳定,可提高产品质量。⑥从长远来看,工业机器人运行成本比较低,单件产品的投入产出比大,具有较好的经济效益。
2 运用切削型工业机器人实现复杂零件的加工案例
使用末端执行器为铣刀的KUKA机器人加工一个叶轮零件为例,说明复杂零件数控加工的流程可以实现。
(1)机器人切削组件。切削加工组件主要包括有数控主轴、主轴变频器、主轴转接头以及辅助加工的工作台等部件。在切削加工中,最为重要的部分是数控主轴。常用的数控主轴有水冷数控主轴和风冷数控主轴两种,水冷数控主轴通过循环水对主轴进行冷却,风冷数控主轴通过风扇进行冷却,重量较大。机器人的载荷为6kg,本系统选择水冷数控主轴进行加工。通过变频器调整输出电压和工作频率,可以实现0~24000rpm无极调速,具有高速度、低噪声、低振动、低温升的特点。
采用主轴变频器控制转速。将高速数控主轴通过一个转接头固定在工业机器人的末端执行器上,安装上相应的加工刀具,再将驱动电源和数控主轴连接起来,使用一个数控加工的旋转台,方便泡沫的固定以及加工,即构成了一套完整的机器人切削加工系统。
(2)数控加工轨迹规划。如图1所示,文章研究的叶轮是数控多轴加工典型的零件,它是发动机中的关键零件,采用普通的三轴加工工艺方法整体性加工难以实现,特别是对于扭曲叶片,只能使用多轴机床进行加工,才能保证叶片质量。目前五轴加工可以实现涡轮叶片的整体性加工,但是加工费极为昂贵。工业机器人具有六个自由度,在理论上完全可以满足涡轮叶片的加工。采用专用的代码转换软件可以将五轴加工的轨迹转换为机器人识别的代码,完成涡轮叶片的加工。

图1 数控多轴加工零件
基于UG/CAM模块完成涡轮叶片五轴加工的轨迹规划,UG提供了多轴编程的模块。如图2所示,依照UG数控编程的顺序,依次建立加工坐标系、加工几何体以及加工刀具等信息。针对叶轮加工,分为粗、精加工两道加工工序。为了提高加工效率,粗加工利用平刀采用型腔铣去除大量的剩余材料,最后大致加工出叶片的形状。但在粗加工时需留取足够的余量,以防止切掉型面。加工完成后将刀具改为 6mm的球头刀进行精加工,依次对叶轮表面和叶片表面进行轨迹规划。在叶轮表面精加工时,以流线方式驱动刀轴,刀轴方向垂直于驱动体。如图3所示。而精加工叶片以曲面方式驱动刀轴,刀轴侧刃垂直于驱动体。等到加工完成,分别将各个刀轨导出保存,为后续机器人实际加工做好准备。

图2 UG数控编程

图3 叶轮表面精加工
(3)基于UG/Motion的机器人加工仿真。通过UG/CAM模块对加工轨迹进行了规划,但是在实际加工中,由于机器人自身的结构,必须对加工轨迹进行验证,以防止机器人产生碰撞和关节之间的干涉。若在机器上试运行进行检测,会占用大量时间,降低机器人的加工效率。而在UG/Motion环境中直接对机器人加工进行运动仿真分析以及对碰撞和干涉进行检测。因此,基于UG/Motion的机器人加工仿真相比传统检测具有很大优势。
利用 UG/Motion的功能能够赋予各个关节一定的运动特性,再在各个关节之间设立一定的驱动关系,建立一个运动仿真模型。由于UG/Motion可以对机器人进行运动合理分析工作,诸如干涉检测、轨迹包络等,就可以得到相关的运动参数。通过对机器人运动仿真模型进行运动学和动力学运动分析就可以验证加工轨迹的合理性,并且可以利用图形输出各个关节的扭转角、加速度和力的变化,不仅可以对机器人加工实时监控还可以对加工轨迹进行优化。
确定如下原则,地基是固定不动的。如图4所示,A1是绕Z轴旋转,组件类型为C轴。A2是绕X轴旋转,组件类型为A轴。A3是绕X轴旋转,组件类型为A2轴。A4是绕Y轴旋转,组件类型为B轴。A5是绕X轴旋转,组件类型为C2轴。A6是绕Y轴旋转,组件类型为B2轴并且还要在A6上面要加载主轴头和刀具。
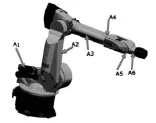
图4 机器人三维模型
建立机器人三维模型后,可通过各种约束限制构件之间的相对运动,由于工业机器人各个关节之间主要是旋转副连接,所以想要减少系统的自由度,可以在系统上加约束。然后在UG/Motion中将六个关节设置为连杆,添加相应的性能参数。对于KUKA机器人,对六个关节之间分别建立旋转副,连杆之间相互咬合。在添加约束中,需对机器人底座添加一个固定运动副,底座固定。建立约束以后,机器人在约束条件下运动。
除了约束以外,还需添加相应的驱动使运动模型运动。而UG就能提供多种驱动方式,如:恒定、简谐、函数和铰链运动驱动。由于机器人运动轨迹不是规律的函数,因此需要将KUKA切削加工系统中生成的各个关节变量值以表格的形式建立成特定的XY函数作为驱动函数。所谓驱动函数就是对六个关节分别建立以时间横坐标,以旋转角度为纵坐标的XY函数。
3 数字化测量简述
与三坐标接触式测量相比较,非接触式三维扫描具有扫描速度快、不接触物体表面、能对物体多方位视角扫描等优点,主要包括:结构光法、激光测量等测量方法。
CREAFORM系列三维扫描仪是具有双光投影功能的光学三维扫描系统,可实现光学LED灯与曝光时间的控制、相机拍摄图像和转台旋转,能提供清晰的条纹图像和白光图像,配合数控转台,实现实物的数据获取.其测量精度达到0.02 mm,该测量系统将可见光光栅条纹图像投影到待测物体(鼠标)的表面,然后通过CCD将拍摄到的条纹图像输入计算机,应用三维图像处理软件,可根据条纹按照曲率变化的形状再利用相位法和三角法就能精确计算出物体表面每一点的X、Y、Z坐标,获得实物表面的三维点云数据。最后将扫描得到的数据结果导入到GEOMAJIC程软件中,进行数据处理和优化。由于三维扫描仪不能很精确的测量凹槽部位,就会造成扫描的实体会缺损部分信息,所以还要在逆向工程中需要对这些部位进行填充修补。而数字化测量目的是检测,所以可以用其对关键位置进行分析。这样就可以实现三维扫描技术快速的精确检测模型的加工精度。
4 结语
随着工业制造业生产自动化和智能化水平的提高,机电一体化数控的应用领域也不断地在扩大。基于机器人离线编程技术的发展,多轴数控机器人在切削加工领域在未来发展中有很大的应用前景。它们的最大优点就是使其原本复杂的零件经加工后会变得容易许多,而且缩短了加工周期,提高了表面的加工质量。
[1]陈辉,王磊.机电一体化技术的现状及发展趋势[J].机械,2008,(7):1-4.
Application of Electromechanical Integrated Numerical Control Technology in Mechanical Manufacturing
HUA Xue-yan
(Fuyang Institute of Technicians,Fuyang,Anhui 236000,China)
With the rapid development of China's industry,its demand for advanced manufacturing technology has become stronger.This paper takes the numerical control technology of electromechanical integration and the multi-axis numerical control robot combined with the digital measurement as an example,illustrates the complete process of the machining of complex parts by cutting industrial robots to prove the new development and advantages of mechanical and electrical integration numerical control technology in machinery manufacturing.
electromechanical integratio;numerical control;industrial robots;processing
TH-39
A
2095-980X(2017)04-0025-02
2017-03-07
滑雪燕(1987-),女,安徽阜阳人,大学本科,讲师,主要研究方向:机械制造技术。
猜你喜欢
能源工程(2022年2期)2022-05-23
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
重型机械(2020年2期)2020-07-24
装备制造技术(2019年12期)2019-12-25
现代装饰(2018年5期)2018-05-26
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年3期)2017-06-23
中国三峡(2017年2期)2017-06-09
电子工业专用设备(2015年4期)2015-05-26
