无泄漏自动注入系统的控制方案设计
2017-06-23 08:54李金萍王飞飞房妤
无线互联科技 2017年7期
李金萍 王飞飞 房妤
摘要:系统的重点是自动注取液体和保证无泄漏,在工作时能够快速、准确地控制角度和量,且稳定运行。文章对无泄漏自动注入系统的控制方案进行了阐述。
关键词:无泄漏;自动注取;PLC
1系统概述
整个系统的重点是自动注取液体和保证无泄漏。对于本研究的设计方案,由于其端口较多,控制要求较高,所以选用PLC作为其控制器。PLC建立柔性的程控系统,具有通用性强、使用方便、适应面广、可靠性高、抗干扰能力强、编程简单等特点。为操作方便,系统采用触摸屏为人机接口。
2方案构想
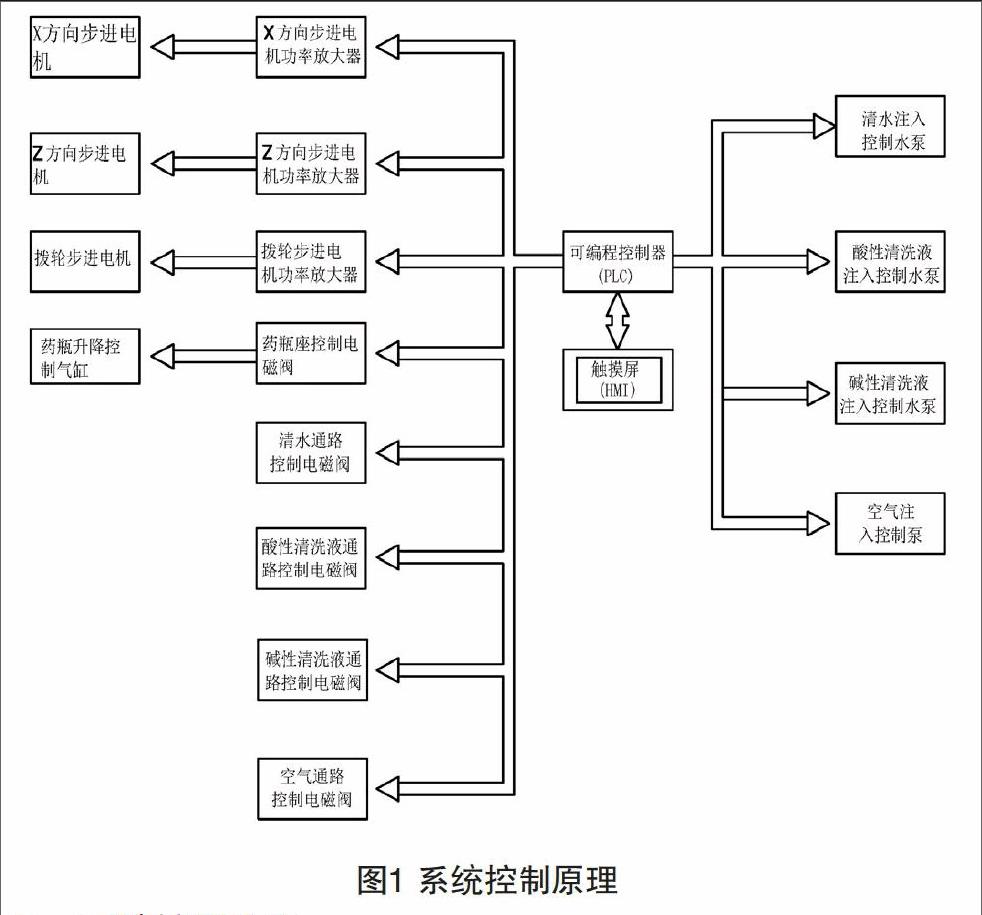
根据系统注入要求的分析,本文提出一些相应的解决方案:PLC作为整个系统的控制核心,它会收到来自光电感应器发出的信号,判断取液工位上是否有可以使用的原料瓶,还要接收来自注取液工作平台的位置和电机转动圈数的反馈信号,以及须注入药液发生罐的位置反馈信号。它向每一个运动部件发出运动指令,控制其运动量,以达到一定精度的定位和定量。定位方案所用器材:PLC:西门子S7-224xpcn及USB下载电缆。编程及仿真用软件为V4.0 STEP 7 MicroWIN SP3。系统控制原理如图1所示。
3系统控制流程
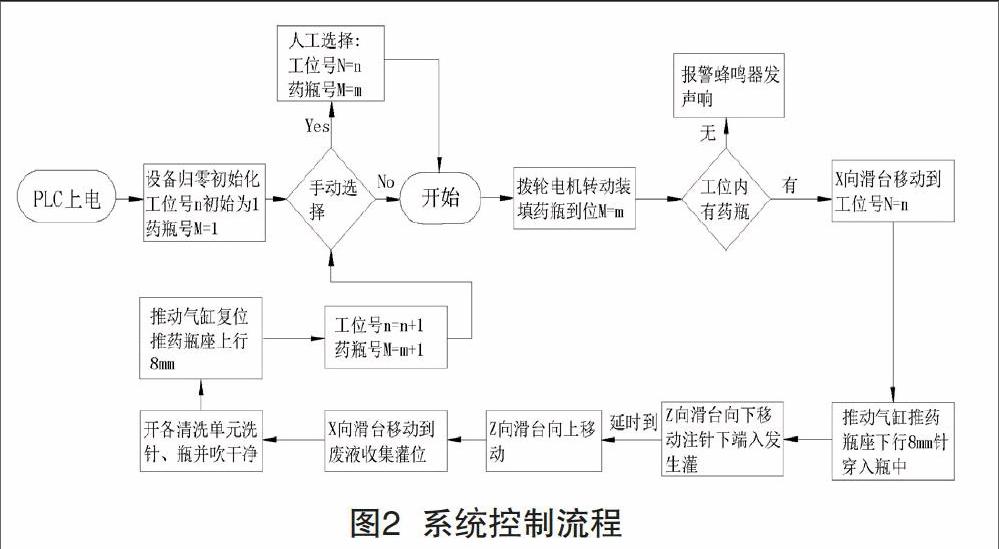
系统控制流程如图2所示。
系统工作流程如下:
(1)由工作人员将密封好的装有将要注入的药剂的药瓶安装到药瓶夹座上,由传感器检查到是否安装好,安装好后向系统发出一个完成信号。
(2)由注入系统的上级工控机或人工向注入系统发出注入工位号n,并指定加入某个药剂瓶号m。
(3)注入装置的PLC系统接到指令对指令进行处理,发出指令使X方向和Z方向的工作,对系统的两个方向进行基点对正,这个对正过程的程序事先已经写入了PLC系统。
(4)基点对正后,再由PLC系统的发出注入的指令,这时z方向的步进电机保持自锁不动,以确保Z方向上的位置不变。而星型拨轮上的步进电机接到指令开始工作,驱动星型拨轮转动,从而星型拨轮整体转动到指定的药瓶到注入位置,向系统发出一个完成信号。而X方向上的步进电机接到指令开始工作,驱动X方向上的滚珠丝杠转动,从而推动滑台整体移动到指定的注入位置。这个注入的位移由系统程序计算完成,由所选用的丝杠的导程、基点设置位置、注入位置和与基点之间的距离,步进电机的步进角来计算步进电机的总脉冲数。这样由程序发出X电机总的进给脉冲数,在没有失步的情况下就能精确地完成走到指定的X方向注入位置的任务。
(5)当X方向步进驱动丝杠带动滑台走到指定的注入位置指令完成后,有一个反馈信号,X方向的上进电机自锁,将X方向丝杠固定到确定的位置。PLC系统接收到X方向进给指令完成信号后,发出下压动作信号。系统发出指令让空气泵工作,接着发出控制下压空气回路的电磁阀的打开指令。下压气缸就在空气压力下带动瓶夹向下运动,完成取液针刺穿瓶塞动作。电磁阀的打开指令保持,过程完成后,向PLC系统发出一个信号指令。
(6)系统接收到指令后进行注入药剂过程。PLC系统发出Z方向进给指令,Z方向步进电机工作,驱动Z方向丝杠转动,从而带动Z方向上的滑台整体向下移动。Z方向滑台上安装固定的注针和药瓶夹座的相对位置不变。这个Z方向的注入位移由系统程序计算完成,由所选用的丝杠的导程、基点设置位置、发生池内密封橡胶到Z方向基点之间的距离,步进电机的步进角来计算步进电机的进给脉冲数,此次进给的Z向步进电机的总的进给脉冲数。由PLC系统发出,进给过程完成后,Z方向步进电机自锁,Z向丝杠也被固定。
(7)當注针的下端注入发生池内后,打开密封的话,就会因发生池内原来由真泵产生的负压力,将药剂由药瓶内主动的向发生池出吸入,在此同时由系统发出一个指令将与通气针管相连的通气阀打开,并同时通入一个较小的气压,以帮助药剂更充分顺利地注入。
(8)此过程完毕之后,药剂的注入也随之完成。注入达到3分钟后,由PLC系统发出退针指令,启动Z向步进电机,Z向步进电机反转。此时Z向丝杠带动Z向上的滑台、药瓶及注针一起退回到Z向上的基点位置,注针退出发生池的药罐内的单向密封接头后,单向密封接头弹性恢复力将这个注针孔密封。
(9)当退回到基点位置后,步进电机停止转动,同时系统发出一个指令。
(10)系统接到信号,发出指令启动X方向的步进电机,电机反转驱动丝杠,带动X向滑台及整个注入机构一起向X向的基点退回(消除传动副累积误差),当退回到X向基点对齐时,X向步进电机停止反转,变为正转。
(11)反转完成,对准X向基点后,X向电机就正转。进入清洗药瓶的过程,进行清洗药瓶的X向进给。这个清洗的进程由系统程序计算完成,由所选用的X向丝杠的导程、基点设置位置、清洗液回收罐的位置和基点之间的距离、步进电机的步进角,来计算X向步进电机的此次进给的总脉冲数。当进给到回收罐的位置时,X向步进电机停止转动。
(12)X向步进电机停止后,向系统发出信号。系统接收到信号后,发出指令,启动Z向步进电机正向转动,驱动丝杠,带动Z向滑台向下进给。这个清洗的Z向进程由系统程序计算完成,由所选用的Z向丝杠的导程、基点设置位置、清洗液回收罐的位置和基点之间的距离、步进电机的步进角,来计算Z向步进电机的此次进给的总脉冲数。当进给到回收罐的位置时,Z向步进电机停止转动。
(13)当Z向进给完成后,发一个信号给系统。当系统接收到信号后,由注入的药剂的种类而发出指令。这个指令的发出由系统原来确定的注入药剂而决定。为酸性药剂时,就打开碱性清洗液的控制泵,为碱性药剂,就打开酸性清洗液的控制泵,用清洗液中和反应药剂,使残留药剂失去原有的药性不会再造成任何伤害。当泵入一定量的清洗液后,停止清洗泵,启动蒸馏水泵,向药瓶中注入蒸馏水,将清洗液洗净。当注入一定量的蒸馏水后,关闭蒸馏水控制泵,再接通空气泵,启动空气泵使用较大的压力,用空气将整个清洗回路中的残余蒸馏水排尽。通气2分钟后,停止空气泵的工作,向系统发出一个信号。
(14)当系统接收到清洗完成信号后进行处理,发出将注针退出清洗液回收罐的指令。此时启动Z向步进电机反转,带动Z向滑台、药瓶和注针整体向上退回到Z向基点位置。
(15)当退回到Z向基点位置后,步进电机停止转动。同时系统发出一个指令,使控制下压气缸的电磁阀处于回退状态,下压气缸就在弹簧压力下向上运动,药瓶夹座与取液针远离,完成取液针脱离瓶塞,这样气缸就恢复到原始状态。
(16)上步过程完成后,系统发出指令启动X方向的步进电机,电机反转驱动丝杠,带动X向滑台及整个注入机机构一起向X向的基点退回,当退回到X向基点对齐时,X向步进电机停止反转,接着向系统发出一个信号。
(17)系统接收到退回X向基点对齐时指令后,整个注入药剂和清洗药瓶的过程就完成了。系统等待其他的信号的出现,系统处理空闲状态。
(18)注完药剂,清洗完后的药瓶由工作人员取下来放在指定的地方待处理。
4结语
系统的重点是自动注取液体和保证无泄漏,在工作时能够快速、准确地控制角度和量,且稳定运行。文章主要确定了机构运动的控制方法和控制流程的实施,希望能为使用该类系统的相关工作人员提供借鉴。