舰炮拦截超声速反舰导弹跟踪雷达架构需求
2017-06-22 14:07张保山
指挥控制与仿真 2017年3期
吴 强,张保山
(1.解放军92941部队94分队,辽宁 葫芦岛 125001;2.江苏自动化研究所,江苏 连云港 222006)
舰炮拦截超声速反舰导弹跟踪雷达架构需求
吴 强1,张保山2
(1.解放军92941部队94分队,辽宁 葫芦岛 125001;2.江苏自动化研究所,江苏 连云港 222006)
采用毫米波技术能够提高雷达的角跟踪精度,克服多路径和低角跟踪时的海杂波干扰问题,改善低空跟踪性能。为满足拦截超声速目标作战要求,论证了舰炮火控系统对跟踪距离指标需求,根据跟踪雷达的距离方程,仿真计算了大气衰减、降雨衰减、不同相对湿度能见度条件下3mm波雷达作用距离分析。最后为避免毫米波受气象影响因素,并最大程度利用其在低角跟踪方面的优势,采用“厘米波+毫米波”架构,为舰载3mm波跟踪雷达的应用提供支撑。
舰载毫米波雷达架构;舰炮火控系统;反舰导弹
现代战争节奏日益加快,高性能隐身飞机、巡航导弹、反辐射导弹及电子战装备等大量参与作战使用,武器系统的远程打击能力不断提高。命中精度也越来越高。面对新的威胁,作为舰载防空武器系统重要信息源的舰炮火控系统必须适应这种军事需求,尤其要提高火控系统的超低空跟踪性能、快速反应性能、抗干扰能力及可靠性[1]。
近年来随着反舰导弹技术快速发展,具有了射程更远、威力更大、速度更快、精度更高、雷达反射截面积(RCS)更小、更加机动灵活等特点[2-3],对舰艇近程防御系统在目标发现、跟踪、拦截等方面提出了更高的要求。目前我周边国家和地区海军装备的反舰导弹,如印度的“布拉莫斯”、“台湾雄风3”反舰导弹,其速度已经超过马赫数2.5,末端攻击可达马赫数3。采用雷达跟踪体制对付掠海飞行的反舰导弹,迫切要解决的问题是:1)低角跟踪问题和多路径效应问题,解决这些问题的一种方法是采用更窄波束,雷达频率波段需要超过40GHz;2)对超高声速掠海飞行目标的跟踪问题是舰艇末端防御的一大难题,国外海军采用的技术途径之一是采用毫米波雷达(雷达频率波段要超过30GHz)技术。这主要是考虑到毫米波跟踪精度比厘米波雷达高,波束角小,能够消除跟踪掠海目标时的镜像反射现象,克服了多路径和低角跟踪时的海杂波干扰问题,大幅改善低空跟踪性能[4-9]。
目前国内外装备的近程反导用跟踪雷达通常在K、Ka、Ku波段,毫米波跟踪雷达通常为8mm、3mm雷达体制在舰载近程反导中应用目前仍是空白。因此,研制一型舰载3mm跟踪雷达火控系统,把3mm跟踪雷达和火控设备作为一个整体进行顶层一体化设计,实现雷达火控系统的高度集成,解决多年来困扰海军舰炮武器系统对低空掠海和超高速机动飞行反舰导弹的拦截问题,具有重要的科技创新价值。
另外,目前装备的舰载近程单脉冲跟踪雷达由于伺服系统受限、速度模糊,普遍不具备对马赫数3.5以上反舰导弹的拦截能力,窄的波束对目标指示的要求也较高,往往需要增加粗跟踪引导,因此国外火控跟踪雷达不只采用毫米波雷达,往往会将毫米波与厘米波雷达集成于一体,实现对目标的快速精确跟踪。
1 国外基本情况
国外如俄罗斯的“卡什坦”近程武器系统、意大利“米瑞得”[1]和新一代跟踪雷达[10]采用了毫米波技术。
1)“卡什坦”(KaⅢTAH)近程武器系统
其作战对象主要针对反舰导弹、飞机、海上小型目标和有生力量,由指挥单元和战斗单元组成。其主要技术指标为:最大探测距离(发现概率为0.9)时,对0.1m2,高度15m的目标 10km~12km;对0.1m2,高度5m的目标 8km~10km;对5m2,高度1000m的目标 45km。跟踪雷达工作频率波段:厘米波、毫米波,波束宽6mrad,天线最大跟踪速度40°/s,最大跟踪加速度50°/s,跟踪精度:角精度0.15mrad,距离精度±5m。
2)米瑞得(MYRIAD)近程武器系统
意大利研制,用于拦截新一代超声速飞行的反舰导弹。包括Ka波段单脉冲搜索/跟踪雷达和一部W波段(3mm)辅助精确跟踪雷达。Ka波段主要用于远距离搜索与跟踪,W波段主要用于近距离、存在多路径干扰或者需要极高跟踪精度的环境。W波段不可单独使用,而是与Ka波段联合使用。W波段跟踪雷达在其下方还装有电视摄像机。Ka波段的角跟踪精度为1mrad,W波段的角跟踪精度为0.3mrad。
该系统与意大利目前的“达多”和“海上卫士”市场相冲突,而“海上卫士”占有较大市场份额,因此其市场前景还存在一定的竞争。若采用“米瑞德”,意味着放弃“海上卫士”,但前期该公司生产“海上卫士”舰载近程武器系统已经完成定型,在此基础上再研制一个新的近程武器系统,其市场前景还存在争议。这是目前近程武器系统中唯一装备两个毫米波频段(8mm和3mm)跟踪雷达。
3)新一代综合型雷达
①LIROD MK2
轻型K波段(中心频率35GHz)/光电火控跟踪雷达。波束宽度高低0.55°,方向1.5°,功率100W(平均),雷达作用距离:36km。跟踪速度2rad/s,跟踪加速度4.5rad/s2,脉冲多普勒,FFT。
②STING EO MK2(STIR 1.2 EO MK2)
THALES NEDERLAND研制。主要技术特征为:I波段(8GHz~10GHz)、K波段(20GHz~40GHz)、EO组合雷达,为火炮及导弹火控雷达,用于防空、反导及火力支援。波束宽度:K波段0.5°,I波段2°。高低方向:-30°~120°,跟踪速度:2.5rad/s,训练2.7rad/s。发射机功率25W(K波段),300W(I波段)。作用距离:36km(K波段),120km(I波段)。
③Type 911跟踪雷达
UNITED KINGDOM研制,其主要技术特征为:I波段(8GHz~10GHz)、L/M波段(40GHz~100GHz),用于“海狼”舰空导弹系统。L/M来源于DN181“野火”(BLINDFIRE)雷达,主要用于精确跟踪低角度掠海目标。
国外近程反导火控雷达的一个主要特点是:当采用双波段雷达时,通常采用X波段或者I波段(工作范围8GHz~12GHz,厘米波)、K/Ka波段(20GHz~40GHz,8mm波段),为了保证对目标的捕获跟踪,厘米波雷达的波束宽度约2°,而毫米波的波速宽度不超过0.7°,前者主要负责搜索和粗跟踪,后者实施精确跟踪。为了提高抗干扰手段,多数火控雷达集成了激光、光电、红外电视功能。同时为了提高适装性,火控(制导)雷达普遍采用固态发射机方式。
2 火控系统对跟踪雷达作用距离的指标需求
为满足毫米波跟踪雷达火控系统的反导作战需求,研究了火控系统探测距离的作用要求[11-12],为毫米波跟踪雷达火控系统未来拦截高速反舰导弹提供技术基础。
与大口径火炮相比,中、小口径火炮具有射速大、精度高、随动快等优点,还适合用作弹炮结合武器系统。目前国内现有的防空火炮包括76mm、57mm、37mm、35mm、30mm、25mm和23mm口径系列。其中,57mm和37mm高炮虽然射程较远,但射速低、精度差,不能满足现代防空作战的需要;25mm和23mm火炮拦截弹药类目标的有效斜距不超过2km,不能与导弹构成有效的火力重叠。所以,小口径火炮选型主要为30mm、35mm,中口径火炮选型主要为76mm。
系统反应时间是指从发现目标到开火的最短时间,武器系统反应时间按式(1)计算:
Ts=T1+T2
(1)
其中,Ts为系统反应时间;T1为跟踪器调舷、捕获跟踪时间:从接收到符合精度的目标指示开始至向火控设备输出有效的目标跟踪信息,方位调舷一般为90°调舷;T2为火控解算时间:从接收到跟踪器发来的满足指标要求的目标数据和跟踪好信号到输出射击诸元数据的时间。
在系统反应时间基础上,还应考虑系统的有效射击远界和弹丸飞行时间Tf。
系统的反应时间主要由T1、T2和Tf等部分组成。在不考虑配置搜索雷达的情况下,从跟踪器调舷、捕获跟踪目标到火控输出有效诸元的时间定义为系统反应时间。
跟踪传感器的最大作用距离按式(2)计算
Dgmax≥Du+Vm(Ts+Tf)
(2)
式中,Dgmax为跟踪传感器最大作用距离,Du为系统首发命中点距离。不考虑数据传输时间和射击启动时间,对于超声速目标,仅考虑跟踪传感器的最大作用距离如图1所示。
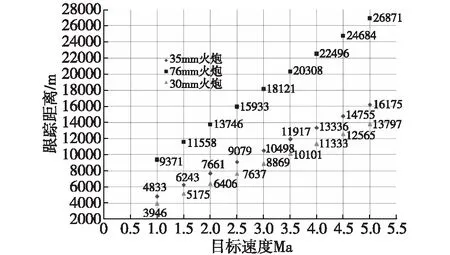
图1 典型口径火炮对跟踪最大距离
图1中,计算了30mm、35mm、76mm典型口径火炮对不同速度的跟踪距离要求。由图1可以看出,跟踪超声速目标要求系统的跟踪最大距离要求较高,对于马赫数5目标跟踪器的30mm、35mm口径最大有效跟踪距离须分别大于14km、16.2km;当对付马赫数3.5目标时,目标跟踪器的最大有效跟踪距离须分别大于10km、12km。使用76mm口径拦截马赫数3.5超声速目标时有效跟踪距离要求大于20km,这对跟踪雷达提出较高要求,因此往往不使用中大口径舰炮拦截超声速目标。
综上,采有小口径火炮拦截超声速目标时对跟踪雷达的最大跟踪距离的要求是,针对雷达反射截面积0.1m2,飞行速度不大于马赫数3.5,飞行高度不小于5m的掠海飞行导弹的跟踪距离不小于12km。
3 系统作用距离分析
雷达最大跟踪距离计算公式按式(3)[13]:
(3)
式中,Pt为峰值功率;τ为脉冲宽度;G为天线增益;σ为天线波长;λ为目标雷达截面积;I为积累改善;K为玻尔兹曼常数;T0为标准室温;Fn为接收机噪声系数;Ls为系统损失;D0为检测因子;γ为衰减系数。
根据跟踪雷达提供的相关参数,进行仿真验证和计算分析,主要包括:大气衰减作用距离分析、降雨衰减作用距离计算分析、不同相对湿度能见度计算分析。
3.1 大气衰减作用距离分析
微波和更短波段的无线电波通过大气时,大气中的分子,主要是水汽和氧气分子,会吸收电波能量而产生能级跃迁,从而引起电波衰减。接近地面水平路径上的衰减,由于氧气误差率γo和水汽的衰减率γW在整个积分路径上为常数,因此总的衰减路径按二者之和计算。根据ITU-RP.676-6提供的一种简易计算方法[13~14],氧气和水汽的地面衰减率见图2。
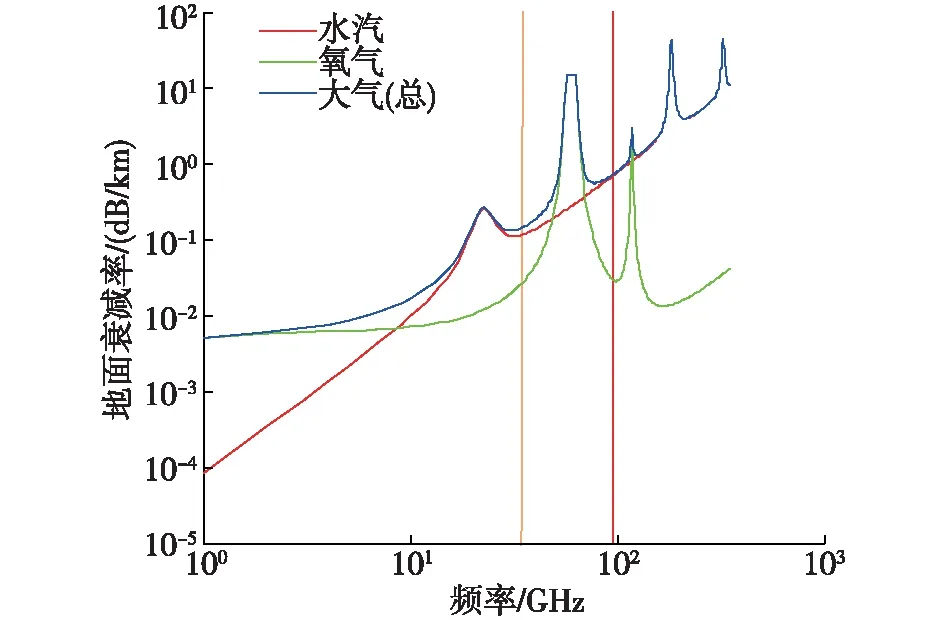
图2 氧气和水汽的地面衰减率
根据波段在15GHz(2cm)、35GHz(8mm)、95GHz(3mm)雷达的相关参数,考虑大气条件下的双程衰减分别为0.1dB/km、0.3dB/km、0.8dB/km,计算对雷达反射截面积2m2、0.1m2的最大跟踪距离,如图3、4所示。

图3 RCS=2m2目标作用距离分析
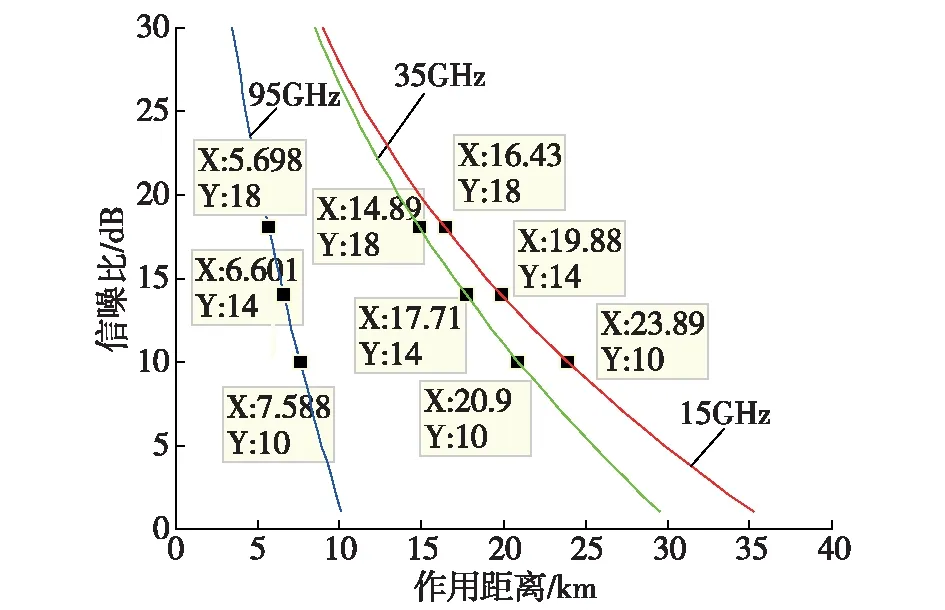
图4 RCS=0.1m2目标作用距离分析
通常信噪比超过18dB时,雷达可以从复杂背景中进行信息处理并正确检测目标,对2m2目标,15GHz(2cm)、35GHz(8mm)、95GHz(3mm)雷达的作用距离分别为29.79km、25.45km、8.939km。对0.1m2目标,15GHz(2cm)、35GHz(8mm)、95GHz(3mm)雷达的作用距离分别为16.43km、14.89km、5.698km,若前期有引导跟踪数据,目标信噪比可降低到10dB时,此时对应的作用距离分别为23.89km、20.9km、7.588km。
3.2 雨衰减计算分析
根据Laws-Parsons雨滴分布[14],计算降雨衰减,降雨衰减与雨强(mm/h)的关系见图5,典型毫米波降雨衰减与雨强的对应值如表1。

图5 雨衰减率与雨强关系
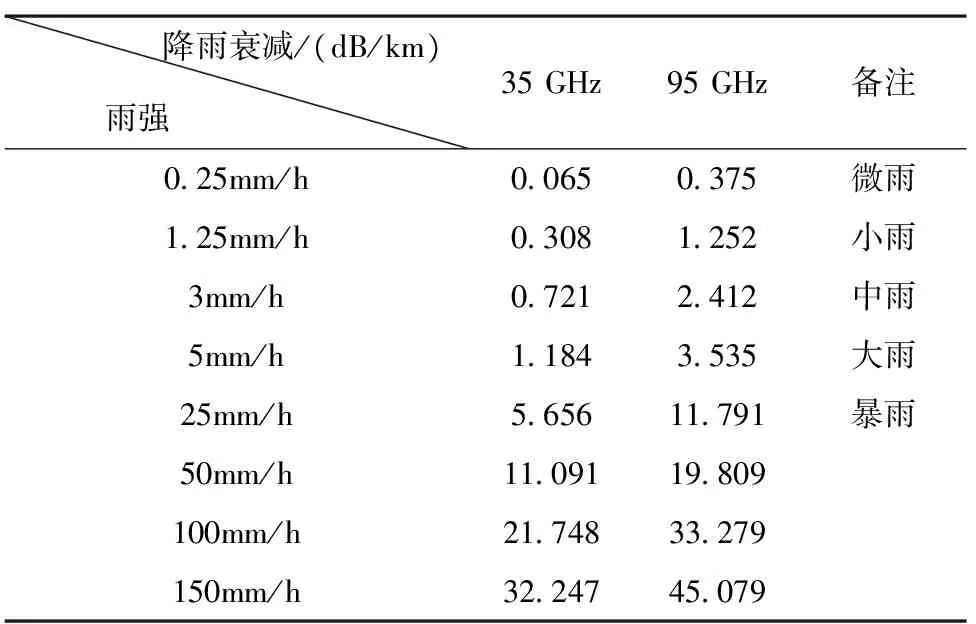
降雨衰减/(dB/km)雨强35GHz95GHz备注025mm/h00650375微雨125mm/h03081252小雨3mm/h07212412中雨5mm/h11843535大雨25mm/h565611791暴雨50mm/h1109119809100mm/h2174833279150mm/h3224745079
根据表1进行3mm波段对2m2、0.1m2雷达反射截面积目标在不同降雨条件下的计算结果见图6。

图6 降雨与雷达作用距离关系图
从图6可以看出,在小雨条件下3mm波段对0.1m2导弹目标作用距离仅为6.2km。降雨条件下严重影响毫米波雷达的作用距离,毫米波基本不能适应海上降雨条件下的跟踪作用距离。
3.3 不同相对湿度能见度分析
不同相对湿度及能见度衰减曲线见图7。

图7 不同相对湿度能见度图衰减
根据图7进行3mm波段对2m2、0.1m2雷达反射截面积目标在不同降雨条件下的计算结果见图8。
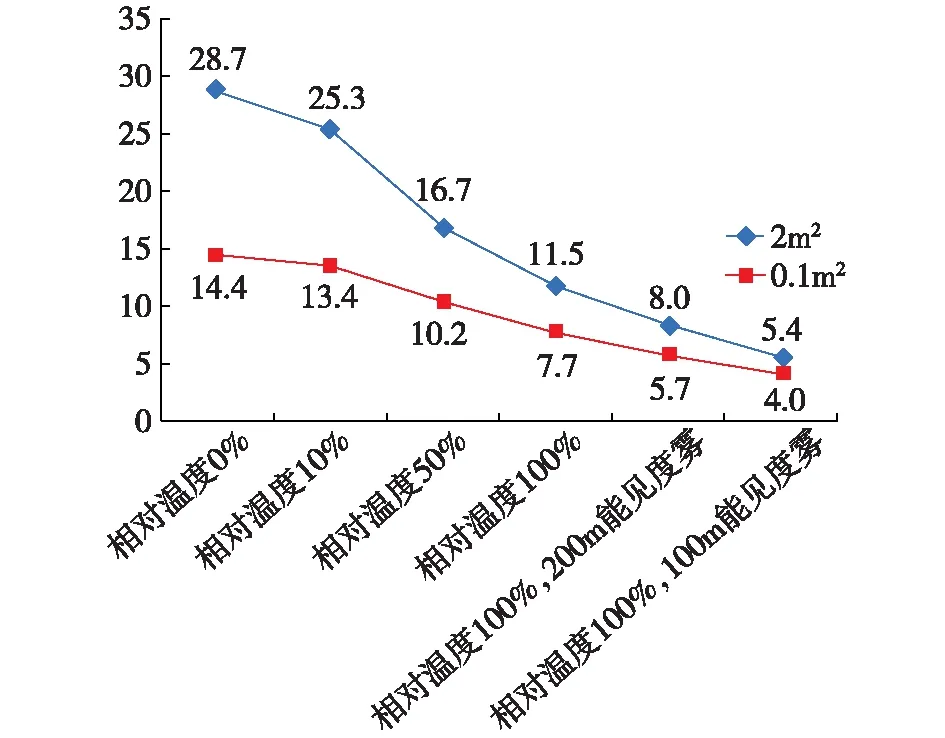
图8 不同相对湿度能见度图作用距离
从图8可以看出,在相对湿度100%,200m能见度雾时,3mm波段对0.1m2雷达反射截面积目标作用距离仅为5.7km。通常海上环境相对湿度为94%左右,仅在无雾或者能见度较好时才具备相应的跟踪距离要求。
根据火控系统论证的雷达作用距离要求,为有效拦截超声速目标,舰炮火控系统对雷达的作用距离不低于12km,而3mm波段雷达的作用距离不超过7km,因此须提高其作用威力。提高跟踪传感器威力的有效途径主要有:提高毫米波跟踪雷达的发射功率,随着毫米波组件推广,这一技术瓶颈将会得到突破;采用多传感器探测,如双频段雷达、电视、激光、红外技术,国外新研制的跟踪雷达普遍具有多传感器集成功能。
4 结束语
8mm、3mm主要用于全天候情况,用于低角目标跟踪侧重于抗多路径效应,两个波束口径缩小不明显,特别是3mm不明显,波束提升有限,跟踪时存在一定的捕获困难,前面需要增加引导过程,确保毫米波雷达凝视目标。考虑到3mm作用距离和波束宽度限制,必须增加厘米波段雷达接收目标指示和引导,保证作用距离和捕获概率,即开发双波段雷达火控系统。比较合适的方案是一个波段选小一些,如一个波段选为Ku波段,外加一个W波段,确保W波段的凝视功能,这样W波段窄波束用来信号检测。
本文采用Ku+W波段双波段雷达体制。按照Ku+W波段体制并完善3mm波段的详细技术设计,完善火控系统方案。该方案具有一定的技术前景,能够适应不同气象条件下的跟踪要求,恶劣天气系统不失效。
目前8mm跟踪雷达应用方面比较成熟,在实际随着3mm跟踪雷达器件技术的发展,3mm雷达在国内外开始了工程应用,为了最大程度利用毫米波在低角跟踪方面的优势,采用“厘米波+毫米波”架构,选择了2cm+3mm双波段雷达体制。
针对马赫数3.5的低空反舰导弹的作战需求,采用Ku+W双频段雷达体制,可用于全天候情况,W波束可适用于低角跟踪和抗多路径效应。同时,为解决W跟踪时存在的捕获困难,前端使用Ku波段进行了初始引导,能够确保毫米波雷达凝视目标。该系统论证方案充分考虑了Ku波段和W波段的特点,Ku波段用于目标前期跟踪和引导,W波段窄波束用来信号检测,做到优势互补,确保恶劣天气系统工作正常。
[1] 编委会.国外反导舰炮武器系统[M].北京:国防工业出版社,1995.
[2] Jane’s Land-Based Air Defence,2009-2010.
[3] Jane’s Radar and Electronic warfare Systems 2011-2012.
[4] 同武勤,凌永顺,蒋金水,等.军用毫米波雷达的应用及其发展趋势[J].飞航导弹,2004(5):48-51.
[5] 罗敏.多功能相控阵雷达发展现状及趋势[J].现代雷达,2011,33(9):14-18.
[6] 石星.毫米波雷达的应用和发展[J].电讯技术,2006,46(1):1-9.
[7] 同武勤,凌永顺,蒋金水,等.毫米波雷达的应用及发展[J].光电技术应用,2004,19(4):51-54.
[8] 陈晔.毫米波雷达低角跟踪应用分析[J].舰船电子对抗,2000,23(4):11-15.
[9] 向敬成,张明友.毫米波雷达及其应用[M].北京:国防工业出版社,2005.
[10]Stefan Nitschke.Fire Control Systems for Surface Combatants[J].Naval Forces,2013,34(4):34-38.
[11]国防科学技术工业委员会.GJB403A—98,舰载雷达通用规范[S].北京:国防工业出版社,1998.
[12]Merrill I. Skolnik雷达手册[M].北京:电子工业出版社,2003.
[13]丁鹭飞,耿富录,陈建春.雷达原理[M].第4版.北京:电子工业出版社,2011.
[14]焦培南,张忠治.雷达环境与电波传播特性[M].北京:电子工业出版社,2007:1-434.
Tracking Radar Architecture Requirement for>Ship Gunnery Intercepting Supersonic Anti-ship Missile
WU Qiang1, ZHANG Bao-shan2
(1.94thDetachment of 92941stTroops of PLA,Huludao 125001;2.Jiangsu Automation Research Institute, Lianyungang 222061, China)
Millimeter wave technology can improve radar angle tracking accuracy and performance, which solve the sea clutter jamming problem under multipath and low-angle condition. For interception of supersonic anti-ship missile, feasibility analysis of radar distance index requirement is given. According to the radar equation, computer simulations on the atmospheric attenuation, rain attenuation and different relative humility and fog visibility. To avoiding the meteorological influences and maximizing the low-angle tracking dominance, apply cm+mm architecture which provide technologies for shipborne 3mm tracking radar fire control system.
shipborne millimeter wavelength radar architecture; ship gunnery fire control system; anti-ship missile
2017-02-23
吴 强(1978-),男,山东商河人,工程师,研究方向为舰炮火控系统试验与鉴定及试验理论、试验方法。 张保山(1973-),男,硕士,研究员。
1673-3819(2017)03-0011-05
TJ391;E917
A
10.3969/j.issn.1673-3819.2017.03.003
修回日期: 2017-04-12
猜你喜欢
航天返回与遥感(2022年2期)2022-05-12
数字海洋与水下攻防(2020年5期)2021-01-04
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
兵器知识(2017年10期)2017-10-19
中国新通信(2017年11期)2017-07-16
电子制作(2017年8期)2017-06-05
科技创新导报(2016年28期)2017-03-14
电子技术与软件工程(2017年1期)2017-03-06
卷宗(2016年10期)2017-01-21