
电轨智能小车设计
2017-06-21 11:10:25德州学院机电工程学院王浩然崔庆福吕波漾陈洁
河北农机 2017年6期
德州学院机电工程学院 王浩然 崔庆福 吕波漾 陈洁
电轨智能小车设计
德州学院机电工程学院 王浩然 崔庆福 吕波漾 陈洁
该小车采用通电导线让金属在交变磁场中感应涡流对车进行引导,让车沿一定轨迹行走,通过对线圈得到的信号进行调节放大,控制小车舵机运行的电路,并根据方案实际制作了小车,优点主要体现在交变磁场中感应涡流良好的环境适应性。
电轨智能车;金属;线圈;交变磁场;感应涡流
1 引言
本设计以第十一届全国大学生“恩智浦”杯智能汽车竞赛为背景,提出了一种利用金属在交变磁场感应涡流的特性引导小车循迹行驶的方案。本文介绍了这一方案的基本思想、所依据的物理原理,设计了对线圈得到的信号进行调节放大、控制小车舵机运行的电路,并根据方案实际制作了小车。实践证明,该方案是可行的。以往的智能车竞赛分为光电组、摄像头组和电磁组,其中光电组主要是使用光电传感器如红外传感器采集路径信息;摄像头组主要通过采集图像信息识别路径;电磁组主要是电通电导线产生的电磁场探测路径,而电轨不受光线、温度、湿度、磁场等环境因素的影响。
2 设计原理
由于铝膜胶带的颜色是银色的,与赛道表面的颜色相近,所以使用普通的摄像头检测铝膜胶带的位置比较困难。可以利用铝膜的金属特性,即利用金属在交变磁场产生感应涡流的特性来检测铝膜的位置,进而引导小车的行驶。这种检测方式应用比较广泛,从安检过程中使用的手持金属探测仪到工业生产中涡流距离传感器,都是运用类似的原理。
当通有交变电流(频率小于一定数值)的线圈靠近金属物体的时候,线圈周围的交变磁场会在金属物体中感应出涡流。涡流所产生的二次磁场叠加在原来的磁场中则会改变原有线圈中的感应电动势,进而可以等效改变原线圈的电抗(图1)。
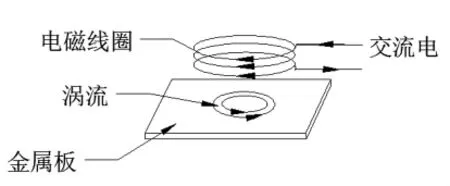
图1 扁平线圈在导电板中感应涡流示意图
线圈电抗改变的大小与线圈的形状、振荡频率、线圈与金属相对位置以及金属的电导率、磁导率有关系。如果在线圈形状、振荡频率以及金属种类都确定的情况下,线圈电抗的变化则能够反映线圈与金属之间的相对位置。

图2 矩形线圈与金属平板之间测相对位置
检测线圈与金属之间的相对位置参数主要包括距离和重合面积,图2显示的是一个矩形线圈与金属平板之间的相对位置,如果距离不变,则相对位置主要由线圈与金属平板之间的重合距离决定。本文所给出的参考方案就是利用这个特点来测量线圈与金属之间的相对重合距离,进而反映了车模与赛道的偏移量。
3 设计方案
3.1 总体方案设计
赛车的位置信号由车体前方的电轨传感器采集,经内部脉冲计数和DMA采集后,输入到控制核心,用于赛车的运动控制决策。通过编码器测速模块来检测车速,并采用K60的输入捕捉功能进行脉冲计数,计算速度和路程。电机转速控制采用PID控制,通过PWM控制驱动电路调整电机的转速,完成智能车速度的闭环控制,此外键盘作为输入输出设备,用于智能车的速度控制,液晶屏时刻显示车的状态以实现车模稳定高速地运行。
3.2 机械结构设计
智能车系统的控制是在一定机械结构的基础上实现的,软件控制硬件,而硬件却依赖于机械结构,合理优良的机械结构能让智能车在直道和弯道上高速稳定地通过,而且转弯灵巧、快速,可见机械结构的设计质量直接影响系统的整体性能。
赛车机械结构只使用竞赛提供车模的底盘部分及转向和驱动部分,控制采用前轮转向,后轮驱动的方案。小车在转向时,弯道内侧的前轮会比外侧的前轮位置低,会造成内侧底盘更高,这样使得弯道内侧前轮压力更大,利于转向,但会造成四个轮子高度不一,使得底盘平衡改变,造成高速转弯时不稳定。最终采用了反应较为敏捷的硬连接结构。
传感器的采集宽度对车模行驶有较大影响,宽度越宽检测的赛道信息越宽,在弯道不容易发生偏离太多而冲出赛道的情况,一般传感器越长,车模前瞻越好,在弯道更容易及时判断入弯,但是传感器过长会使车模转动惯量变大,车模重心靠前,使车模转向困难。在多急弯、有坡道的环境中,为了顺利通过急弯赛道,综合车模的前瞻与转动惯量及重心的影响,经过多次尝试,采用了双杆支架和三线圈结构,保证传感器在运动中的采集稳定性。为了能顺利通过坡道,在前瞻支架最远端两侧和中部线圈两侧安放辅助导轮且不在车模上固定传感器,以保证顺利过坡。传感器的安装结构如图3所示。
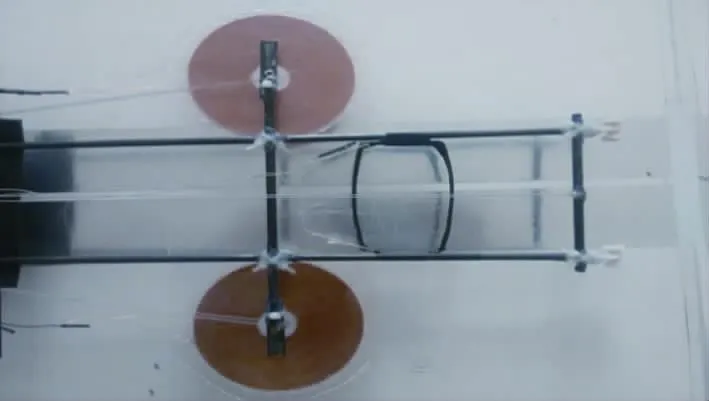
图3 传感器线圈安装方式示意图
3.3 系统电路设计
系统电路的设计目标是可靠、高效、简洁,在整个系统设计过程中严格按照规范进行。可靠性是系统设计的第一要求,本团队对电路的所有环节都进行了电磁兼容性设计,做好各部分的接地、屏蔽、滤波等工作,将高速数字电路与模拟电路分开,使本系统工作的可靠性达到了设计要求。高效是指本系统的性能要足够强劲,在此前提下还要优化电路结构,尽量做到简洁。系统主控电路如图4所示。

图4 主控电路图
3.4 控制算法分析
首先是位置判断,通过计算定方向差值即左边线圈减右边线圈所获值,线圈所获的值均为定值脉宽采集到的脉冲数。最初我们采用的是直接通过差值来确定车的偏移量,经过一段时间的测试,发现采集范围有限,车速慢,提速极易冲出赛道。于是开始尝试寻找突破,最终通过运用DMA增加一路传感器采集,使其成为三线圈结构。但是如果继续提高速度,赛车还是会丢线冲出赛道,因此开始尝试运用三线圈写出丢线。所谓三线圈丢线,就是当三线圈获得的值都小于它们都检测不到金属铝膜所得的值时,此时判定丢线,赛车取上一次状态。
4 总结
在充分查阅资料、进行理论分析的基础上,对电轨智能汽车的机械结构、硬件电路和控制软件分别进行了设计。在机械结构方面,综合考虑到系统的稳定性与简便性,并通过反复实践确定了传感器的数量和位置,采用双杆支架和三线圈结构,保证传感器在运动中的采集稳定性,为了能顺利通过坡道,在前瞻支架最远端两侧和中部线圈两侧安放辅助导轮且不在车模上固定传感器,以保证顺利过坡。在控制软件方面,利用组委会推荐的开发工具编写调试程序,经过团队成员不断讨论、改进,终于设计出一套通用、稳定的程序,实现根据路况调整车速与转向,并在最短时间内跑完全程。经过反复测试、校赛与省赛的检验,证明了该设计方案的可靠、稳定与高效。
[1]卓晴,黄开胜,邵贝贝.学做智能车[M].北京:北京航空航天大学出版社,2007.
[2]邵贝贝.单片机嵌入式应用的在线开发方法[M].北京:清华大学出版社,2004年10月第1版.
[3]竞赛组秘书处.路径检测设计参考方案[M].2015.12.
[4]童诗白,华成英.模拟电子技术基础[M].北京.高等教育出版社,2000.
[5]余志生.汽车理论[M].北京:机械工业出版社,2006.05.
[6]胡寿松.自动控制原理[M].北京:科学出版社,2001年2月第4版.
[7]http://www.freescale.com.cn/.
王浩然,男,1995年出生,山东省聊城市人,本科在读,研究方向:机械设计制造及其自动化。
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:39:12
快乐语文(2020年36期)2021-01-14 01:10:32
玩具世界(2020年6期)2020-12-06 05:55:22
科学大众(2020年17期)2020-10-27 02:49:02
文苑(2018年22期)2018-11-19 02:54:18
通信电源技术(2018年5期)2018-08-23 01:16:00
电子制作(2018年8期)2018-06-26 06:43:02
经营者·汽车商业评论(2016年5期)2017-11-30 16:18:38
汽车科技(2014年6期)2014-03-11 17:46:08
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:09
